Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
ЭЛЕКТРОСТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ 3 page
|
|
сдвиг составляет 90°. Если же контур замкнуть на индуктивное или емкостное сопротивление, то развиваемый момент будет максимальным и кон- тур будет стремиться развернуться так, как показано на рис. 8-4, виг.
Для того чтобы усилить электромагнитное поле и сконцентрировать его в определенной области, применяют ферромагнитные магнитопроводы. Пример двух контур кого преобразователя с ферромагнитным сердечником показан на рис. 8-5. Если через обмотку 1 проходит переменный ток, то в рамке 2 наводится ЭДС, зависящая от угла поворота рамки и хмаксимальная, когда плоскость рамки перпендикулярна линии а — а. Если ток пропустить и через рамку 2, то на рамку будет воздействовать момент Мфд, стремящийся повернуть ее так, чтобы магнитное поле рамки совпало с магнитным полем обмотки. На короткозамкнутую рамку также воздействует момент Минд, вызываемый индуктированньш в рамке током. Кроме того, между обмотками и ферромагнитным магнитопроводом действует электро
магнитная сила или момент, стремящиеся расположить их так, чтобы магнитный поток, создаваемый соответствующей обмоткой, был максимальным. В примере на рис. 8-5 обмотка / оптимальным образом расположена относительно магнитопровода, поэтому между ней и магиитопроводом такая сила не возникает; рамка 2 должна быть развернута так, чтобы ее плоскость была перпендикулярна линии а — а. Однако момент Мэм, направление которого показано на рис. 8-5, очень мал по значению, так как изменение магнитного поля рамки 2 мало зависит от ее поворота относительно магнитопровода.
Энергия электромагнитного поля определяется формулой
п
w«=i 2 '"Л-
Учитывая, как показано выше, что в преобразователе могут действовать, кроме потоков самоиндукции lFz = ihLf{J потоки взаимоиндукции Ч^ = hMkp и потоки внешнего поля xYk внеш, а токи в каждом из контуров, кроме составляющей тока от внешнего источника £/(0, могут содержать еще и ток наведенный потоком Ч7, выражение для энергии первого контура можно представить состоящим из нескольких членов:
т
п п
^ = ши+уМ+ J ^^ + 2 ИЧГ^Ш.
k—2 р=2
m —2
Электромагнитная сила, действующая на первый контур, в соответствии с выражением энергии может иметь четыре составляющие э> /эм» /эд и /инд, называемые соответственно магнитоэлектрической, электромагнитной, электродинамической и индукционной:

|
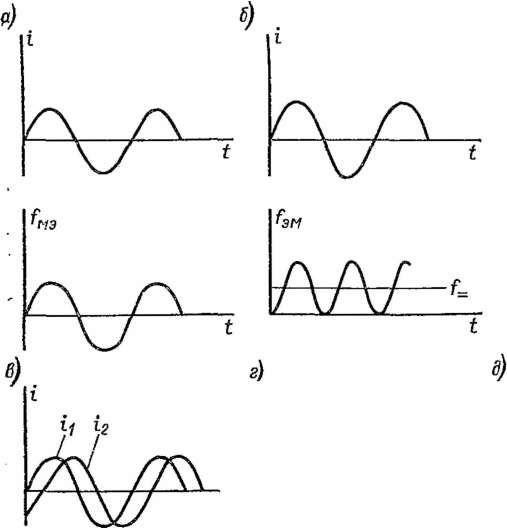
Характер изменения соответствующих сил во времени при синусоидальном входном токе показан на рис. 8-6, а — д. Из рисунка видно, что при постоянном потоке lFmieimi сила /мэ пропорциональна мгновенному току, сила /эм имеет постоянную составляющую,
о п I r9 dL
пропорциональную квадрату действующего тока, гэм ~dg и
переменную составляющую, являющуюся второй гармоникой. Сила /эд имеет постоянную составляющую = IJ2 cos про
порциональную произведению токов и косинусу угла между их векторами, и переменную составляющую, также зависящую от угла сдвига между токами. На рис. 8-6, г показан характер силы /эд, если токи имеют разную частоту.
Характер силы /инд зависит от сдвига между током в контуре и взаимодействующим с ним потоком ЧГт. Сила /ннд также имеет
постоянную и переменную составляющие, особенностью которых является зависимость от частоты потока WP9 наводящего ток в контуре,.
dVD I
так как чем выше частота, тем больше ток =—57--^-.
dt Zy ' -
Область применения электромагнитных преобразователей. В соответствии с принципом действия и исходными уравнениями электромагнитные преобразователи могут быть подразделены на следующие большие группы:
| i U Ч Л//(\ | JmJk. tkp.kp | |
| t | vyyv t | -t |
индукции постоянного и переменного магнитных полей, а также скорости.
4. Индуктивные и взаимоиндуктивные преобразователи для измерения неэлектрических величин, влияющих на изменение положения отдельных частей преобразователя.
5. Магнитоупругие преобразователи, в которых используется зависимость магнитной проницаемости ферромагнитных материалов от механических напряжений в материале. Применяются для измерения сил и давлений.
6. Магнитомодуляционные преобразователи, в которых используются нелинейные свойства магнитной цепи.
7. Преобразователи, использующие эффект Баркгаузена. Выходной величиной этих преобразователей является ЭДС магнитного шума.
8-2. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ РАСЧЕТА ЭЛЕКТРОМАГНИТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Расчет преобразователя складывается из определения его полного магнитного сопротивления и последующего вычисления его электрических параметров (L, М или Е).
|
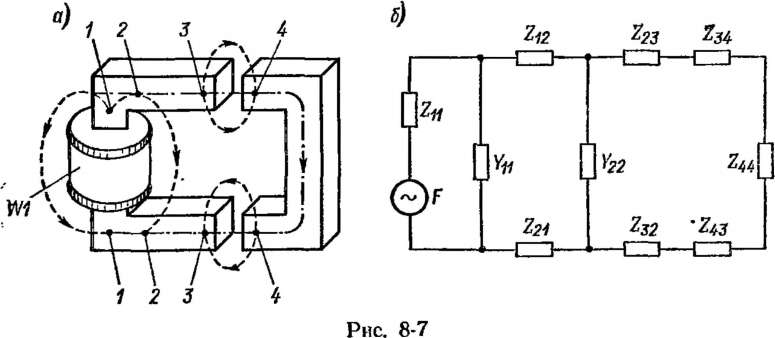
На рис. 8-7, а изображена магнитная цепь электромагнитного преобразователя с обмоткой W1, число витков которой равно wx. Полное сопротивление обмотки W1, пренебрегая утечками магнитного потока, можно записать в виде
где Rg — сопротивление обмотки постоянному току; ZM Fe — магнитное сопротивление ферромагнитной части магнитной цепи, которое при работе преобразователя на переменном токе следует считать комплексным: ZM Fe = Rn + отражает потери в стали на гистерезис и вихревые токи); Rt = 26/ (f-i0S) — сопротивление
воздушного зазора; jut0 = 4зх * 10~7 Гн/м — магнитная проницаемость воздуха; б и S— длина и площадь зазора.
Расчет магнитной цепи электромагнитного преобразователя с учетом сопротивления утечек производится на основе эквивалентной схемы магнитной цепи (рис. 8-7, б). Для упрощения расчета в большинстве случаев можно предположить сосредоточенными комплексные магнитные сопротивления отдельных участков стальной цепи Zi — Z4, магнитные сопротивления воздушных зазоров Ret и R^ и проводимости путей утечек Yu и У22.
Расчет сопротивления каждого из стальных участков зависит от значения индукции в материале, определяющего значение [х (рис. 8-8), и от степени проявления поверхностного эффекта в материале.
Поверхностный эффект необходимо учитывать, если толщина листа или сплошного магнитопровода а > 2z0i05, где z0i0$ — глубина проникновения электромагнитной волны в материал (т. е. глубина затухания ее на 95%); z0>05 уменьшается с увеличением частоты как г0,о5 = k/V®- Для стали, например, при частоте 50 Гц г0.0& = 1^2 мм.
В постоянном магнитном поле магнитное сопротивление каждого участка рассчитывается как RMi = h/(iiiSi), где /;, jut/ и 5/— длина, магнитная проницаемость и площадь поперечного сечения i-ro участка.
В переменном магнитном поле при отсутствии или слабом проявлении поверхностного эффекта (когда напряженность поля уменьшается по сечению от периферии к центру, но потоком заполнено еще все сечение стали) активная Rwi и реактивная XKi составляющие сопротивления каждого участка цепи рассчитываются по формулам:
R,i = li/faiSi); хм; = Рст/(соФ|),
где Ф^ — действующий поток; Рсг — мощность потерь на гистерезис и вихревые токи.
Значения мощности потерь для различных марок электротехнической листовой стали, которые наиболее часто употребляются в измерительных преобразователях, приведены в ГОСТ 21427.0—75 — ГОСТ 21427.3 — 75 «Сталь электротехническая тонколистовая».
При сильном проявлении поверхностного эффекта магнитные сопротивления определяются не площадями Si, а периметрами щ сечений ферромагнитных участков:
Rm = ph/Ui] XMl- = nl-J uh
| \ * В | |
| Слабые— | — Сильные |
| поля | поля |
| Рис. 8-8 |
где p и х — удельные поверхностные сопротивления, зависящие от свойств материала, частоты и линейной плотности магнитного потока Фi/ui. На рис. 8-9 приведены экспериментальные кривые р и % в функции Ф/и для мягкой стали при / = 50 Гц (образец испы-
тывался в ре-жиме синусоидального потока). Кривыми можно пользоваться и при других частотах, принимая
VU50; (Ф/и)/ = (Ф/и)юК50//.
Расчет магнитных проводимостей зазоров и путей утечек через воздух (см. рис. 8-7) производится по обычным формулам, применяемым при расчете магнитных цепей постоянного тока. Магнитное сопротивление зазора при поперечных размерах зазора, много больших его длины 6, определяется формулой Ri = 6/ (|%S), где \i0 = 4п ■ 10~7 Гн/м — магнитная проницаемость воздуха и
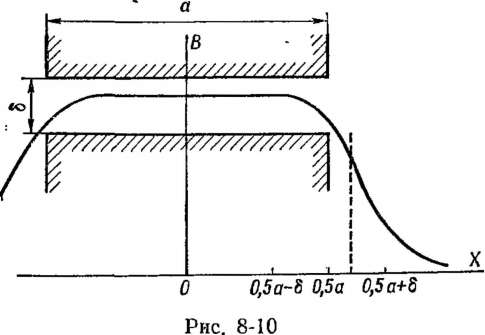
5 — площадь поперечного сечения зазора. Однако в большинстве случаев приходится учитывать, что параллельно проводимости зазора включаются проводимости утечек с боковых поверхностей и ребер полюсов. При этом относительная величина Схут/Се и, следовательно, значение потока, идущего мимо рабочего зазора, будут тем больше, чем больше отношение 6/а, где а — сторона полюса. Равномерность распределения индукции в зазоре также зависит от относительных размеров полюса и зазора. На рис. 8-10 приведена кривая распределения индукции в зазоре под полюсами при условии, что все сечение полюса занято магнитным потоком, т. е. поверхностный эффект отсутствует. Из кривой видно, что у краев зазора, на расстоянии от края, примерно равном б, начинается спад индукции.
Кривая спада индукции меняет свою кривизну, точка перегиба соответствует координате (0,5а+0,46). Чтобы обеспечить равномерность индукции в зазоре, рекомендуется выбирать а не менее (8ч-10) 6.
При резко выраженном повер хностком эффекте магнитный поток вытесняется по периферии полюса, индукция в зазоре распределяется неравномерно и при увеличении зазора сопротивление его растет незначительно, так как увеличение
| РОС | X | / | |||||||
| / | |||||||||
| > | У | ||||||||
| \ | |||||||||
| \ | Р/ | ||||||||
| \ | |||||||||
| =/?А | i+jXn | ||||||||
| 1. | |||||||||
| !\М | ГР1 | а I, | |||||||
| хм | 1 1 | ||||||||
| Ф. и | |||||||||
| 0 0,2 0,4 0,6 0,8 мкВб им Рис. 8-9 |
|
6 влечет за собой распространение силовых линий к центральной части полюса, т. е. увеличение эффективной площади полюса, замед
ляющее рост R6. Поэтому при резко выраженном поверхностном эффекте рекомендуется сужать поперечные размеры торца полюса до величины а — 2г0>05.
Выбор МДС и числа витков катушки электромагнитного преобразователя. МДС преобразователя определяет ряд величин, от которых зависят такие важные характеристики преобразователей, как чувствительность, точность, потребление мощности и габариты. Рассмотрим это обстоятельство на приведенных выше примерах. На рис. 8-1,6 показан магнитоупругий преобразователь. Очевидно, что чем больше число витков обмотки и соответственно ее индуктивность L = t^2/ZM и чем больше ток через обмотку, тем больший при прочих равных условиях выходной сигнал (например, в виде изменения напряжения на преобразователе) сумеем получить с этого преобразователя. Однако увеличение числа витков приведет к увеличению габаритов обмотки или при заданных габаритах потребуется намотка более тонким проводом и увеличится активное сопротивление обмотки. Увеличение МДС приведет также к увеличению активной мощности, выделяющейся в преобразователе и вызывающей его нагрев, что, в свою очередь, может привести к появлению погрешностей. На рис. 8-5 было показано принципиальное устройство фер- родинамического измерительного механизма. Характеристики механизма в Значительной степени определяются МДС обмотки 1. Увеличение МДС обмотки 1 приведет к увеличению индукции в зазоре, в котором находится рамка, и соответственно к увеличению вращающего момента Мфд, что позволит при прочих равных условиях повысить качество механизма. Однако увеличение МДС приведет к увеличению мощности, потребляемой механизмом из измерительной цепи, в которую он включен. Увеличение потребления прибора существенно снижает его эксплуатационно-технические характеристики.
Таким образом, выбор МДС и числа витков обмотки ЭМ преобразователя должен производиться при комплексном учете ряда факторов. Связь некоторых из них с МДС и числом витков рассмотрена ниже.
1. Полная мощность преобразователя, которую в первом приближении можно принять равной его реактивной мощности, определяется как Рр — соГФ, где F — МДС; Ф — магнитный поток. Мощность преобразователя - Рр должна быть в десятки-сотни раз больше требуемой выходкой мощности (см. § 3-2).
2. Температура нагрева катушки © определяется удельной тепловой нагрузкой преобразователя, равной = P^SOXJ[t где Р = — = /2 (Ro + соw2XJZi,) — активная мощность преобразователя; 5охл — поверхность охлаждения катушки (подробнее см. § 2-2).
wnDCp
3. Сопротивление обмотки постоянному току RQ == р —-щ^, где
£>ср — средний диахметр витков катушки; dn — диаметр проволоки. При заданной площади SOKH окна катушки и коэффициенте укладки ky число витков определяется из выражения w — 45окн&у/ Найдя
отсюда dn и подставив в уравнение R0J получим R0 =npDCpW2/ (S0Kilfey).
Активная мощность Р должна быть меньше допустимой по нагреву: Р ^ |50Х/1©Д0П. Величину £ рекомендуется ограничить значением 50—100 Вт/м2 (50—100 мкВт/мм2).
5. Электромеханическая сила притяжения якоря к сердечнику
равна =
6. Магнитный поток равен Ф = Iw/Zм. Если пренебречь, падением напряжения на сопротивлении R0J значение потока можно определить из формулы Ф — UI (соw). Допустимое значение потока определяется по выбранному значению индукции В или при резком проявлении поверхностного эффекта по выбранному значению Ф!и.
Приведенные выше формулы позволяют определить допустимую МДС обмотки, т. е. произведение Iw, или, что чаще бывает удобнее, отношение Uiw. В малогабаритных преобразователях выбор МДС ограничивается нагревом катушки собственным током. В измерительных механизмах выбор МДС определяется допустимым потреблением механизма, а также допустимым значением индукции в магнито- проводе, так как увеличение индукции приводит к появлению погрешности, вызываемой магнитным гистерезисом.
В индуктивных и магнитоупругих преобразователях желательно создать такую индукцию в магнитопроводе, чтобы магнитная проницаемость стальных участков была максимальной, или при резко выраженном поверхностном эффекте обеспечить такое значение Ф/«, чтобы удельные магнитные сопротивления р и к были минимальными (см. рис. 8-9). При этом сопротивление преобразователя Z практически не зависит от колебания напряжения источника питания. В индуктивных преобразователях, используемых в приборах для измерения малых сил и давлений, где якорь преобразователя выполнен в виде мембраны или закреплен слабой пружиной, МДС ограничивается допустимой силой притяжения F9M, которая должна быть намного меньше измеряемой.
| 4. Активная мощность, выделяемая в преобразователе, равна |

|
| или учитывая, что / = WZ и пренебрегая при расчете Z сопротивлением постоянному току R0y получим то же выражение в несколько ином виде: |

|
При заданном напряжении на обмотке преобразователя или токе через нее число витков обмотки определяется однозначно. Однако в ряде случаев, в особенности для преобразователей неэлектрических величин, напряжение питания можно выбирать произвольно, используя трансформатор. В этом случае число витков выбирается по требуемому сопротивлению преобразователя Z ^ со&,2/ZM. Если
преобразователь работает с усилителем, имеющим большое входное сопротивление, число витков берется возможно большим. При необходимости получения максимальной выходной мощности нужно выполнить условие согласования сопротивления преобразователя с последующей измерительной цепью и отсюда найти число витков (см. гл. 3). При выборе числа витков в любом случае нужно кроме вышесказанного иметь в виду следующее: напряжение питания по технике безопасности не должно превышать 200—300 В, диаметр провода по технологическим соображениям нежелательно брать слишком малым и при большом числе витков {w > 100) диаметр выбирается не менее 0,07 мм.
|
Выбор частоты источника питания. При измерении динамических величин частота источника питания должна быть больше ча
|
стоты измеряемого процесса, чтобы измеряемая величина воспроизводилась без заметных искажений. Если же частота измеряемого процесса невелика, то можно питать преобразователь от сети переменного тока частоты 50 Гц. Однако, как видно из приведенных выше формул, повышение частоты при заданной активной мощности, а также при заданных МДС или магнитном потоке позволяет повысить напряжение питания преобразователя. Повышение напряжения питания позволяет увеличить выходной сигнал преобразователя. Однако увеличение выходного сигнала будет пропорционально повышению напряжения питания лишь до тех пор, пока при возрастании частоты не происходит резкого возрастания магнитного сопротивления и магнитных потерь в магнитопроводе из-за поверхностного эффекта. Возрастание магнитного сопротивления ферромагнитных участков приводит, с одной стороны, к уменьшению относительного изменения полного магнитного сопротивления под действием измеряемой величины и, с другой, как видно из приведенных выше формул, — к ограничению напряжения питания. Поэтому при использовании магнитопроводов из сплошного материала не рекомендуется выбирать частоту выше 100—200 Гц. При использовании сердечника из листового материала можно увеличить частоту питания до 1 — 10 кГц, а при использовании ферритовых сердечников — до 100— 300 кГц.
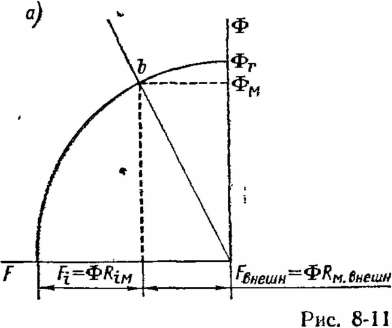
точника МДС, т. е. магнита, сравнимо по значению с сопротивлениями внешней цепи и зависит от проходящего через магнит потока, т. е. оно нелинейно. Зависимость потока через магнит и магнитную цепь от МДС, падающей на внутреннем сопротивлении магнита (F/ — <&RiiA) и во внешней. магнитной цепи (Лшеп.п== внешп), показана.на рис. 8-11, а. При коротком замыкании магнита (Я.-™ = 0) вся МДС FM = = HJ.,, где Нс — коэрцитивная сила; /м — длина магнита, падает на внутреннем сопротивлении магнита, и поток магнита максимален и равен Фг = B,SMt т. е. остаточной индукции материала магнита Вг, умноженной на площадь магнита SM.
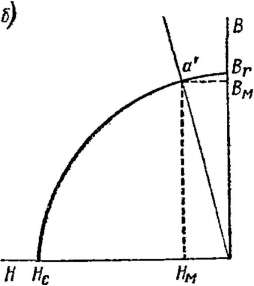
Если внешняя цепь имеет конечное сопротивление, то координаты точки Ь на кривой определяются отношением
^V-^внешн 1/^м. внеши = ^м. внешп.
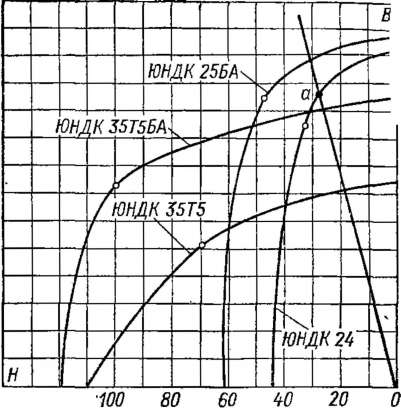
Для того чтобы абстрагироваться от размеров конкретного магнита, при расчетах используются кривые магнитных материалов В = f (И). Для этих кривых положение точки а' (рис. 8-11, б) определяется отношением BJHU = <J„. внешн IJSM, поток магнита и его МДС рассчитываются как Фм = BMSM и fM= = Ям/м. Кривые некоторых магнитных материалов приведены на рис. 8-12.
Рис. 8-13
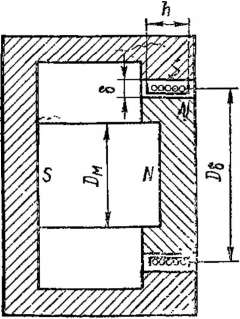
В качестве примера приведен расчет индукции в зазоре магнитиой системы (рис. 8-13), если известно, что магнит выполнен нз материала ЮНДК24, имеет диаметр DM= 15 мм и длину /м= 15 мм, длину зазора 6 = 1,2 мм, площадь зазора = 400 мм2, проводимость зазора G5 = 4,2- Ю"7 Гн, проводимость путей утечек GyT = 1,0-10~7 Гн; сопротивлением стальных участков магнитопровода можно пренебречь.
| Выбор материала и габаритов постоянных магнитов. Расчет цепей с постоянными магнитами затрудняется тем обстоятельством, что внутреннее сопротивление ис- 1 Тл -.1,3 4,2- -1,1. 11,0 |
| kA/N 120 |
| Рис. 8-12 |
|
Полная проводимость внешней цепи составляет G„ ВНешн = G& + GyT = 5,2 X X Ю~7 Гн. Отношение
| 15 - Ю-з |
| Тл А/м ' |
| ^- = 0,039-10-3 |
| BJHM = GM |
| (п ■ 152/4) 10 |
hUSm-5,2.10-7
Прямую, соответствующую полученному отношению В! И, удобно провести на рис 8-12 через точку с координатами В = 0,78 Тл, Н ~ 20 кА/м. Точка а пересе-
чения полученной прямой с кривой для материала ЮИДК24 определит индукцию
я • 152
в магните как £м = 1,07 Тл. Поток магнита Фм = £WSM = 1,07 —— 10~6 = 189 мкВб.
Часть потока идет через сопротивление утечки, поэтому поток через рабочий зазор составляет
Фб = Фм = 189 J^flfi = 153 мкВб"
Индукция в зазоре
I 1 п-6
Тл.
При расчете постоянных магнитов, как правило, требуется по заданной проводимости внешней цепи выбрать материал и размеры магнита так, чтобы обеспечить в зазоре требуемую индукцию. В частности, в рассмотренном примере, как видно из рис. 8-12, индукция в материале магнита и соответственно в зазоре была бы выше, если бы магнит был выполнен из материала ЮНДК 25БА, и ниже — для материала ЮНДК 35Т5БА.
Кривая размагничивания каждого из материалов имеет некоторую экстремальную точку (эти точки на кривых рис. 8-12 помечены кружками) с координатами Bd и Hdj характерную тем, что для нее произведение ВН максимально. В измерительных преобразователях размеры- магнита выбираются так, чтобы обеспечивалась индукция в магните BM ^ Bd. При — Bd обеспечивается наименьший объем магнита при заданном материале и заданной энергии магнитного поля в зазоре. Однако от этого правила часто отступают, чтобы увеличить индукцию в зазоре и таким образом за счет увеличения объема магнита увеличить чувствительность преобразователя или улучшить какие- либо другие его технические характеристики. Повысить индукцию в зазоре при заданном материале магнита можно увеличением размеров магнита. Увеличение длины магнита всегда приводит к увеличению индукции в магните, но это увеличение после того, как достигнута индукция Вм> Bdl не превышает 10—20%. Увеличение площади магнита при неизменной длине магнита приводит к уменьшению индукции в магните. Но пока рабочая точка находится на плоской части кривой, поток магнита Фм = BMSM все же возрастает, так как относительное уменьшение индукции меньше, чем относительное увеличение площади, и, следовательно, возрастает индукция в зазоре.
В процессе проектирования магнитной системы при отсутствии прототипа и соответствующего опыта проектант испытывает затруднения, так как размеры магнитной системы в известной степени обусловлены неизвестными в начале расчета размерами магнита. Это приводит к необходимости просчитывать много вариантов. Для того чтобы сократить объем работы, можно рекомёнДовать методику приближенного расчета, показанную на следующем примере.
Требуется рассчитать магнитную систему преобразователя, показанного на рис. 8-13, при условии, что длина зазора 8—1,5 мм, диаметр входящей в него обмотки = 25 мм и ширина обмотки h = 8 мм. Индукция в зазоре должна быть не менее = 0,6 Тл.
При первом приближенном расчете можно пренебречь сопротивлением стальных участков и считать, что все проводимости путей утечек включены параллельно аазору и полная проводимость утечки Gyx = kG§. В правильно сконструированной
магнитной системе GyT = (0,25 -f- 0,5) G&. Индукция в зазоре Bp, = Фгде Ф§ = = OmG6/(G6 + GyT) — поток в зазоре и S& — площадь зазора.
Учитывая,, что Фн — BMSM и Gyr — kG&, можно определить соотношение, свя-
S 1
зывающее индукцию в зазоре и индукцию в магните: В* = Вм - --.
l-f-я
Величина BtA определяется кривой магнитного материала и соотношением
Вм п
Date: 2015-09-18; view: 686; Нарушение авторских прав