Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Пьезоэлектрические преобразователи
|
|
Д доп
Для константановой проволоки р = 0,46 • 10~6 Ом-м и при температуре перегрева 1 К и RyR = 27 кВт/м2 допустимое значение тока
Наиболее распространенной измерительной цепью для тензорезисторов является мостовая измерительная цепь. Напряжение питания цепи определяется допустимым током (5—20 мА) и сопротивлением тензорезисторов и равно 2—12 В. Выходной сигнал моста с проволочными тензорезисторами составляет не более 10—50 мВ при деформации 8/ = 1 %, выходной сигнал моста с полупроводниковыми резисторами имеет тот же порядок, но при деформации е/ = 0,1%.
Повысить напряжение питания и, следовательно, при прочих равных условиях увеличить выходной сигнал удается при питании тензорезисторов импульсным током. При условии, что постоянная т времени нагрева тензорезистора намного больше периода Т следования импульсов, амплитуда импульсов по сравнению с действующим током может быть увеличена в N ^Ут/to раз, где t0 — длительность импульсов. Минимально допустимая длительность импульсов t0 ограничивается переходными процессами установления токов в измерительной цепи, которые, очевидно, должны закончиться за время, намного меньшее /0, и составляет не менее 5—50 мкс. Таким образом, диапазон возможного увеличения напряжения оказывается не слишком большим. Так, чтобы обеспечить iV = 10, частота следования импульсов должна быть не выше 200—2000 Гц, и практически импульсное напряжение питания может быть рекомендовано только при измерении статических или относительно низкочастотных (20—200 Гц) деформаций.
Основным фактором, определяющим выбор измерительной цепи тензорезисторов, является возможность коррекции температурных погрешностей нуля и чувствительности. При дифференциальном включении тензорезисторов в два соседних плеча моста удается понизить
температурную погрешность нуля в 10—20 раз по сравнению с температурной погрешностью тен so резистор а. В мостовой цепи удается в отдельных случаях скомпенсировать также температурную погрешность чувствительности.
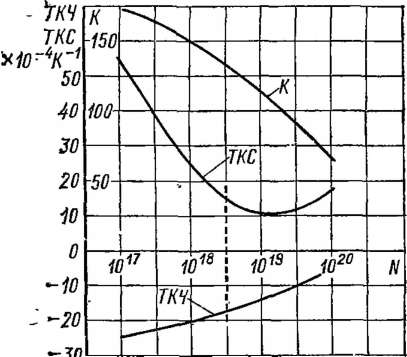
Действительно, из рассмотрения приведенных в § 3-2 мостовык схем видно, что при питании моста от источника напряжения выходной сигнал моста не зависит от входного сопротивления моста: UBb]X = = Unm(ПРИ RyK /?вых.м), при питании моста от источника тока выходной сигнал зависит от входного сопротивления моста: Цвых — IeRRoR'/(R0 + /?') = IzrRhJ2, и при изменении сопротивления тензорезистора R0 в зависимости от температуры удается за счет изменения RBX скомпенсировать изменение eR = K^i от воздействия температуры, если ТКЧ и ТКС имеют разные знаки. Такой метод коррекции используется для полу-, проводниковых тензорезисторов. В частности, термокомпенсированным по чувствительности будет мост из четырех идентичных тензорезисторов р-типа с концентрацией примесей N — С (рис. 5-15). При ТКС > ТКЧ коррекцию чувствительности можно получить подбором сопротивления источника питания.
Для проволочных и фольговых тензорезисторов относительные изменения сопротивления не превышают 2%, поэтому Рис. 5-15 нелинейности, вносимые мосто
вой цепью, относительно малы. Для полупроводниковых тензорезисторов достигает 10% и при рассмотрении погрешности линейности выходного сигнала моста следует учитывать как нелинейность коэффициента тензочувствительно- сти, так и нелинейность, вносимую мостовой схемой (см. § 3-2).
Вследствие малого изменения сопротивления рабочих плеч особого рассмотрения требуют вопросы уравновешивания мостовой цепи. Для уравновешивания последней до значения начального сигнала, соответствующего кажущейся деформации ez = 10~5 (при этом погрешность нуля будет 0,1% при (в/)иэм =1%), требуется изменять сопротивление одного из нерабочих плеч с порогом 4-1(Г5 полного сопротивления плеча. Стабильность сопротивлений нерабочих плеч должна обеспечиваться в пределах ± 10"6.
|
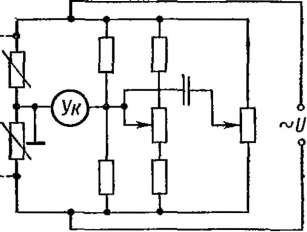
Схема измерительного моста с дифференциально включенными проволочными тензорезисторами и уравновешивающими элементами при питании постоянным током показана на рис. 5-16, а. При питании схемы переменным током необходимо учитывать наличие относительно больших емкостей (10—100 пФ) между проводящими элементами тензорезисторов и деталью, на которую они наклеиваются. Поскольку одна из точек измерительной схемы, как правило, зазем-
Йяется и соединена, таким образом, с металлической деталью, эти емкости оказываются включенными в схему, например, так, как показано на рис. 5-16, б, и измерительный мост может быть уравновешен теперь только при введении дополнительных элементов.
В настоящее время в связи с широким внедрением микроэлектроники наиболее универсальными являются цепи на постоянном токе.
|
| Рис. 5-17 |
Ф
|
Рнс. 5-16
В качестве источника питания в этих схемах используются стабилизаторы напряжения или тока. Выходное напряжение моста усиливается с помощью дифференциального усилителя с высоким входным сопротивлением. Элементы регулирования начального выходного сигнала, показанные на рис. 5-16, весьма громоздки, нерациональны при использовании полного моста, т. е. при включении j \ четырех рабочих тензорезисторов, и приводят, кроме того, к изменению чувствительности схемы вследствие изменения сопротивлений плеч моста при его балансировке (см. § 3-2).
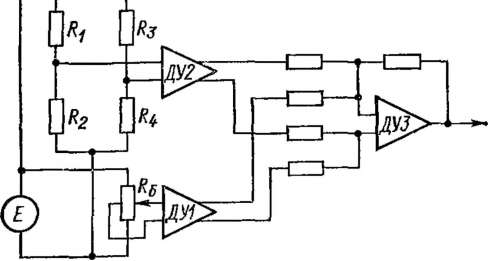
Вариант измерительной цепи со специальным устройством балансировки представлен на рис. 5-17. Балансировочное устройство выполнено в виде делителя напряжения (резистор R6) с дифференциальным усилителем ДУ1 на выходе и подключено к источнику питания моста (стабилизатор напряжения); выходное напряжение усилителя ДУ1 суммируется с выходным напряжением моста, усиленным с помощью предварительного усилителя ДУ2, на входе усилителя ДУЗ.
В настоящее время получают также распространение цепи, в которых выходной ток тензомоста уравновешивается током дополнительного источника, т. е. выполняется условие £/вых.м = 0; при •этом выходной величиной является уравновешивающий ток. Такие цепи,
называемые квазиуравновешенными мостами, подробно проанализированы А. В. Клементьевым.
На рис. 5-18 представлена схема измерительной цепи, построенная на принципе квазиуравновешенного моста. Питание тензомоста
Ri, R%i R3, Ri осуществляется от стабилизатора тока ИТ. Операционный усилитель Ус1, охваченный цепью параллельной отрицательной обратной связи, уравновешивает мост за счет подачи тока /вых в узел а выходной диагонали моста. Дополнительный усилитель Ус2 реализует «плавающее» питание моста таким образом, что потенциал узла b оказывается близким к нулю. В этом случае выходное напряжение преобразователя будет равным ивых = /ВЫХЯ5, где /вых = 2IK& (1 + Цепь
из резисторов R6, R7 предназначена для установки начального уровня. В данной схеме удается в значительной степени снизить влияние сопротивления проводов линий связи с датчиком. Практически сказывается влияние лишь сопротивления гл провода, по которому протекает ток /ВЬ1Х, но это влияние относительно невелико, поскольку величина гл обычно много меньше сопротивления R&, задающего коэффициент передачи устройства.
Область применения тензорезисторов. При всем многообразии задач, решаемых с помощью тензорезисторов, можно выделить две основные области их использования.
К первой области относятся исследования физических свойств материалов, деформаций и напряжений в деталях и конструкциях. Для этих задач характерны значительное число точек тензометрирования, широкие диапазоны изменения параметров окружающей среды, а также невозможность градуировки измерительных каналов. Основной причиной погрешности в этих случаях является разброс параметров тензорезисторов R и /Ст вокруг средних для данной партии значений, и погрешность измерения составляет 2—10%.
Вторая область — применение тензорезисторов для измерения механических величин, преобразуемых в деформацию упругого элемента. В этом случае датчики градуируются по измеряемой величине и погрешности измерений лежат в диапазоне 0,5—0,05%.
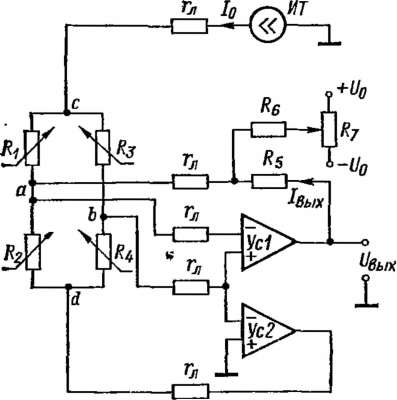 Рис. 5-18
Рис. 5-18
|
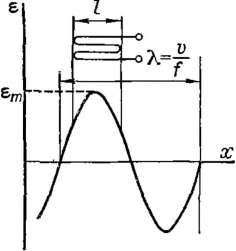 Рис. 5-19
Рис. 5-19
|
Тензорезисторы используются для измерения статических и дина
мических деформаций, верхняя граница частотного диапазона определяется соотношением между длиной волны X и базой I тензорези- стора. Для того чтобы не было искажения результата измерения из-за усреднения деформации (рис. 5-19), принимается отношение /Л, ^0,1. В частности, для измерения в стальных деталях динамических деформаций с частотой до 50 кГц должны применяться тензорезисторы с базой, не большей 10 мм, так как скорость распространения ультразвука в стали v = 5000 м/с и длина волны к = v/f = 100 мм.
При измерении динамических деформаций величина максимальной деформации для проволочных тензорезисторов не должна превышать б/ 0,1%, для полупроводниковых В/ ^ 0,02%, так как при больших деформациях резко понижается надежность тензорезисторов.
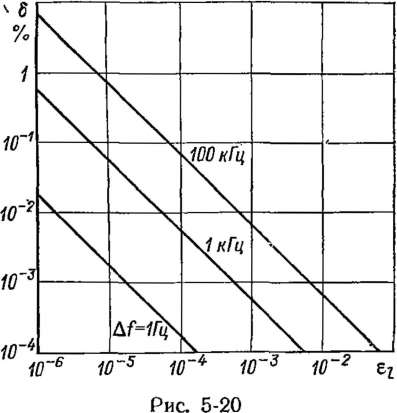
Для повышения точности и чувствительности тензорезисторов, а также измерительных цепей к ним представляет интерес установление предельных возможностей тензорезисторов, определяемых термодинамическими флюктуаниями. Тензорези- стор является параметрическим преобразователем с внутренним сопротивлением R и может быть представлен в виде эквивалентного генератора с мощностью короткого замыкания РКш3 = Рте% = Рт (/(А)2, где Рт — мощность, потребляемая тензорезистором. Средняя мощность термодинамического шума равна Рш = 4kTAf, где k = 1,38-10"23 Дж/К — постоянная Больцмана; Т — абсолютная температура; Д/ — полоса частот. Отсюда средняя квадрэтическая погрешность находится в виде
На рис. 5-20 представлены графики, отражающие зависимость погрешности 6 от величины деформации ez для Рт = 0,1 Вт и различных частотных полос при температуре Т = 300 К.
ГЛАВА ШЕСТАЯ
ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
6-1. ФИЗИЧЕСКИЕ ОСНОВЫ И ОБЛАСТЬ ПРИМЕНЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
|
Пьезоэлектрическими называются кристаллы и текстуры, электризующиеся под действием механических напряжений (прямой пьезо- эффект) и деформирующиеся в электрическом поле (обратный пьезо-
эффект). Пьезоэффект обладает знакочувствительностью, т. е. происходит изменение знаков заряда при замене сжатия растяжением и изменение знака деформации при изменении направления поля. Пьезоэлектрическими свойствами обладают многие кристаллические вещества: кварц, турмалин, ниобат лития, сегнетова соль и др., а также искусственно создаваемые и специально поляризуемые в электрическом поле пьезокерамики: титанат г бария, титанат свинца, цирконат свин

|
ца и т. д.
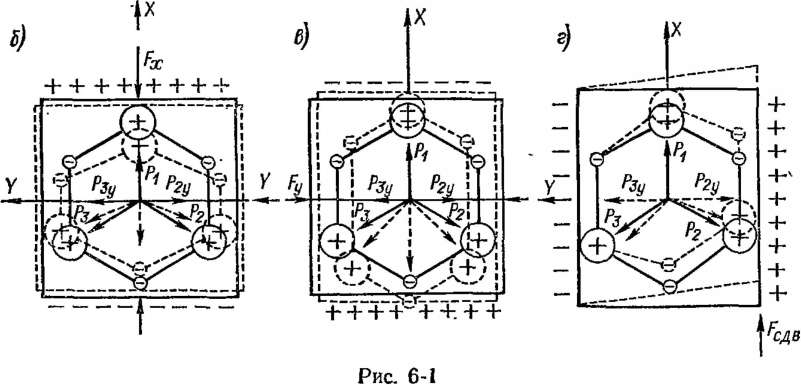
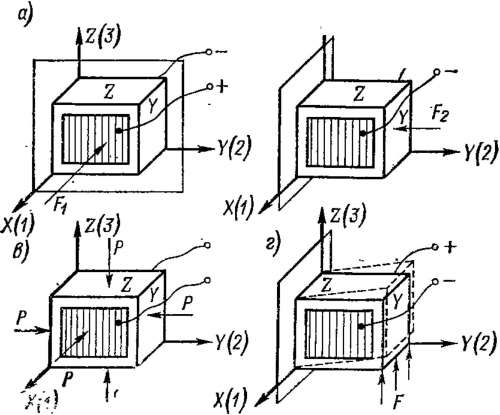
Физическую природу пьезоэффек- та рассмотрим на примере наиболее известного пьезоэлектрического кристалла— кварца. На рис. 6-1, се показана форма элементарной ячейки кристаллической структуры кварца. Ячейка в целом электрически нейтральна, однако в ней можно выделить три направления, проходящи^ через центр и соединяющие два разнополяр- ных иона. Эти полярные направления
|
называются электрическими осями или осями X, и по ним направлены векторы поляризации Plf Р2 и Р3. Если к кристаллу кварца вдоль оси приложена сила Fx, равномерно распределенная по грани, перпендикулярной оси X, то в результате деформации элементарной ячейки ее электрическая нейтральность нарушается. При этом, как показано на рис. 6-1,6, в деформированном состоянии ячейки сумма проекций векторов Р2 и Р3 на ось X становится меньше (при сжатии) или больше (при растяжении) вектора Рг. В результате появляется равнодействующая вектора поляризации, ей соответствуют поляризационные заряды на гранях, знаки которых для сжатия показаны на рис. 6-1, б. Нетрудно видеть, что деформация ячейки не влияет на
„электрическое состояние вдоль оси У. Здесь сумма проекций векторов равна нулю, ибо Р2у = Рзу,
Образование поляризационных зарядов на гранях, перпендикулярных оси X, при действии силы по оси X называется продольным пьезоэффектом.
При механических напряжениях, приложенных вдоль одной из осей У (их называют механическими осями), геометрическая сумма проекций векторов Р2 и Р3 на ось У равна нулю, и на гранях пьезо- элемента, перпендикулярных оси У, заряды не образуются. Однако сумма проекций векторов Р2 и Р3 на ось X оказывается не равной вектору Ра. Так, при сжатии пьезоэлемента, как изображено на рис. 6-1, в, указанная сумма превышает Рь в результате на нижней грани образуются положительные заряды, а на верхней — отрицательные. Рассмотренный эффект образования зарядов на гранях перпендикулярных нагружаемым граням, называется поперечным При равномерном нагружении со всех сторон (например, гидростати ческое сжатие) кристалл кварца остается электрически нейтральным, При нагружении по оси Z, перпендикулярной осям X и У и называемой оптической осью кристалла, кристалл кварца также остается электрически нейтральным. При механическом напряжении сдвига, деформирующем ячейку так, как показано на рис. 6-1, в, геометрическая сумма проекций векторов Р2 и Р3 на ось X равна вектору Ри направленному по оси X, и на гранях, перпендикулярных оси X, заряд не возникает. Однако проекции векторов Р2 и Р3 на ось У не равны, и на гранях, перпендикулярных оси У, возникает заряд.
Рассмотрение физической природы пьезоэффекта показывает, что при напряженном состояний материала заряды принципиально могут возникать между тремя парами граней. Таким образом, поляризационный заряд является вектором и описывается тремя компонентами. Напряженное состояние характеризуется тензором второго ранга с девятью компонентами (см. § 4-5).
Пьезоэлектрический модуль, определяющий зависимости заряда от напряженного состояния, является тензором третьего ранга и определяется 27 компонентами.
| dij = |
Однако, как было сказано в § 4-5, тензор механических напряжений содержит только шесть независимых компонент, которые обозначаются так: аи = аг, а22 = а2, а33 = ст3, а23 — а4, а^ = аб и а12 = ав. Это позволяет перейти к упрощенной форме записи пьезомодуля, представив его в-виде таблицы, содержащей 18 компонент:
dn d12 d13 du d15 die d2 1 d'l 2 d2 3 d2 4 ^25 ^26 d3i d32 d33 d^4 d35 d3G.
По таблице пьезомодулей можно рассчитать плотность заряда на всех трех гранях при действии любого напряжения. При сжатии по оси X (рис. 6-2, а) на грани, перпендикулярной этой оси, возникает заряд, плотность которого = йцЩ при сжатии по оси У
(рис. 6-2, б) — заряд 6Х = d12a2, при всестороннем сжатии (рис. 6-2, в)— заряд — d11o1 + d12a2 + dlsa3, наконец, при сдвиге (рис. 6-2, г)
При продольном пьезоэффекте заряд не зависит от размера пьезо- элемеитов. Так, при сжатии по оси X заряд qt = 61S1 = S1dnF1/S1 —
При поперечном пьезоэффекте заряд может быть увеличен соответствующим выбором относительных размеров пьезоэлемента, т. е.
. длин ребер х и у: q± =
Ч = 6А = SAJJS, =
0+ = d12F2zy/(zx) = dV2F2y!x.
В общем виде плотность заряда определяется формулой 6i = dijOj (i= 1, 2, 3; / = 1, 2, 3, 4, 5, 6).
| Рис. 6-2 |
| dif |
Индекс пьезомодуля означает, что рассматривается заряд на грани i при действии напряжения вдоль оси /. При определении знаков заряда за положительное направление поля принимается направление поля вне пьезоэлемента, совпадающее с положительным направлением соответствующей оси. Знаки механических напряжений определены в § 4-5. Обратный пьезоэффект также определяется по матрице пьезо- модулей. При приложении электрического поля напряженностью Ег между гранями 1—/, или х—х, происходит деформация элемента в направлении оси X, равная ех = dxlEx.
Удобно привести следующую схему, объединяющую пьезоэлектрические уравнения:
£1 е3 е4 е5
| Е1 6г Е2 62 Es 63 |
-ох о2 о3 Оз а5 а0
d\ 1 d12 d13 d14 d15 die d21 dZ2 d23 d2i dty d26 d32 d33 d34 d35 d36.
Симметрия структуры веществ приводит к сокращению числа независимых компонент в матрицах пьезомодулей, большая часть компонент оказывается равной нулю. Значения пьезомодулей di;- в единицах 10~12 Кл/Н для кварца и титаната бария приведены в табл. 6-1.
Таблица 6-1
|
Наличие полярных направлений в пьезоэлектриках (см. рис. 6-1, а) объясняет важность определенной ориентации граней пьезоэлемента относительно кристаллографических осей кристалла X, Y и Z. Форма
|
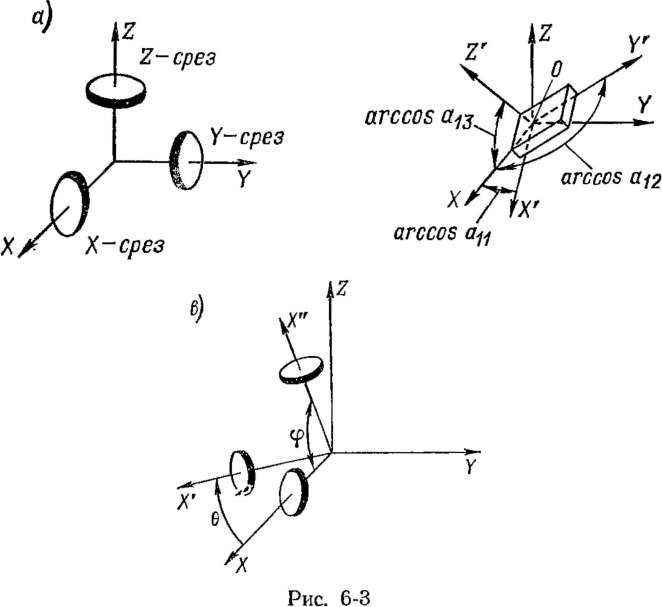
матрицы и значения пьезомодулей, приведенные в табл. 6-1, заданы относительно осей координат, совпадающих с кристаллографическими осями кристалла. Это значит, что ребра пьезоэлемента должны быть ориентированы по осям X, Y и Z. Возможные варианты таких срезов для пьезоэлементов в виде пластин показаны на рис. 6-3, а. Эти срезы называются соответственно осям Х_, Y и Z-срезами. Для нгх механические напряжения, действующие на грани, совпадают по направле
ниям с кристаллографическими осями. Если пластина вырезана произвольно и напряжения действуют в системе координат ОХ\ OY' и OZ' (рис. 6-3, б), то тензор пьезомодуля должен быть преобразован к другой системе координат. Для такого преобразования необходимо вернуться к тензорной системе записи (см. § 4-5).
В качестве примера рассмотрим плотность заряда 6J кварцевого элемента под действием напряжения с'п (остальные компоненты напряжения равны нулю).
Плотность заряда 6J = d[nc'n, где ananandlu -f aua12a12dm + ацо13й13Лш-|- + ana12a13dm + auanal3d112 -f апапа124112 + адавцОц^ш + ■■■ ~r +
-г а^апапс1зи +... + aii. ai2 и au — направляющие косинусы.
Из матрицы пьезомодулей видно, что отличны от нуля только пьезомодули dni = — rfix, dl22 = —du, d123 — dbu dc,\a = —du и — = —2dn.
Подставив значения пьезомодулей в выражение для d[llt получим d[n = = Оуу {а\х — 3flt|a) d±1. На основании этого уравнения можно определить и-зменение
пьезомодуля при отклонении ребер пластины от главных осей. В частности, при смещении ребер на угол 6 (рис. 6-3, в) йц = cos 6, а12 — cos (90 -h 6), d'ni = dlx cos 36 и при смещении на угол <р будет ац — cos ф, а12= 0, dftll=du cos3 <р. Очевидно также, что при 6—30° пьезомодуль = 0, а при 6 = = 60° d[lt — dn, что полностью соответствует физической картине, показанной на рис. 6-1.
Область применения пьезоэлектрических преобразователей весьма обширна.
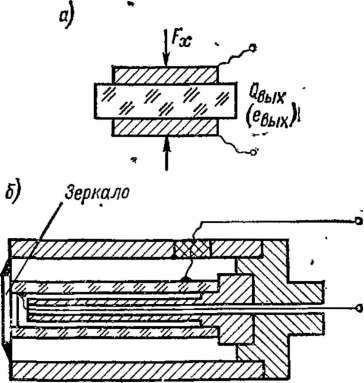
1. Преобразователи, в которых используется прямой пьезоэффект(рис. 6-4, а), применяются в приборах для измерения силы, давления, ускорения.
2. Преобразователи, где используется обратный пьезо- эффект, применяются в качестве излучателей ультразвуковых колебаний, преобразователей напряжения в деформацию, например, в пьезоэлектрических реле, исполнительных элементах автоматических систем, перемещающих зеркала оптических приборов (рис. 6-4, б), обратных преобразователей приборов уравновешивания и т. д.
|
| в) |
| шиш |
| т |
| Рис. 6-4 |
3. Преобразователи, в которых используются одновременно прямой и обратный пьезоэффекты, — пьезорезонаторы, имеющие максимальный коэффициент преобразования одного вида энергии в другой на резонансной частоте и резко уменьшающийся коэффициент преобразования при отступлении от резонансной частоты, применяются в качестве фильтров, пропускающих очень узкую полосу частот (рис. 6-4, в).
Пьезорезонаторы, включенные в цепь положительной обратной связи усилителя, работают в режиме автоколебаний и используются в генераторах. В зависимости от типа кристалла, среза и типа возбуждаемых колебаний пьезорезонаторы могут выполняться с высокостабильной, не зависящей от внешних факторов собственной частотой и с управляемой собственной частотой. Управляемые резонаторы используются в частотно-цифровых приборах как преобразователи различных, преимущественно неэлектрических (температура, давление, ускорение и т. д.), величин в частоту.
В пьезоэлектрических преобразователях используются кварц и различные типы пьезокерамик. Пьезокерамики имеют значительно более высокие по значениям, чем кварц, пьезомодули, но худшие упругие свойства. Модуль упругости пьезокерамических материалов Е = (0,65 -4- 1,3)10~и Па. Добротность, определяемая только механическими потерями, лежит в диапазоне Q = 100 н- 300. Тангенс угла потерь (при напряженности Е < 25 кВ/м) для большинства пьезокерамических материалов составляет tg 6 — 0,02 ч- 0,05. Все материалы обладают пьезоэлектрическими свойствами лишь в определенном. температурном диапазоне, граница которого определяется точкой Кюри. Для кварца точке Кюри соответствует температура ©^ = — 530 °С, для пьезокерамик эти температуры значительно ниже. Значения пьезомодулей, определяющие чувствительность наиболее распространенных типов преобразователей, приведены для различных пьезокерамических материалов в табл. 6-2, там же указаны значения диэлектрической проницаемости е и температуры соответствующие точкам Кюри.
Таблица 6-2
| Материал | ©К, •с | ед. е0 | Пьезомодуль, пКл/Н | ||
| —^31 | daa | die | |||
| ТБ-1 | 45—78 | 100—190 | |||
| ТБК-3 | |||||
| ТБКС | |||||
| ЦТС 19 | |||||
| ЦТС 21 | — | ||||
| ЦТС 22 | — | ||||
| ЦТС 23 | — | ||||
| ЦТС 24 | — | ||||
| ЦТС 300 | |||||
| ЦТБС-1 | — | ||||
| НБС-1 | — | ||||
| НБС-3 | — | ||||
| (Ко,й Na0t5) Nb03 | — |
| 6-2. ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ СИЛЫ, ДАВЛЕНИЯ И УСКОРЕНИЯ |
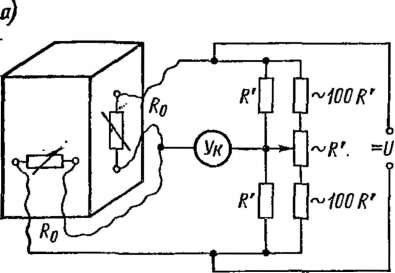
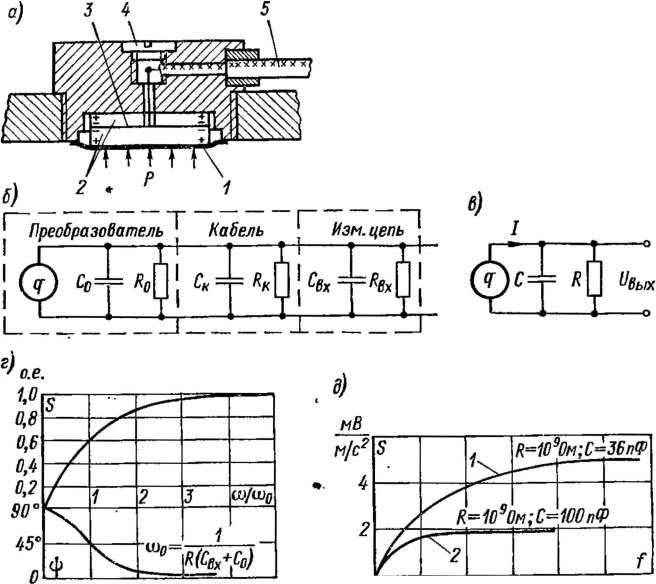
Устройство и измерительные цепи. На рис. 6-5, а схематически изображено устройство пьезоэлектрического преобразователя. Изме
ряемое давление Р действует на мембрану /, представляющую собой дно корпуса преобразователя. Наружные обкладки кварцевых пластин заземляются, а средняя обкладка (латунная фольга 3) изолируется относительно корпуса самим кварцем, имеющим очень высокое удельное сопротивление. Кварцевые пластины Х-среза 2 соединены параллельно. Сигнал с кварцевых пластин снимается экранированным кабелем 5. Для удобства соединения вывода от фольги с внутренней жилой кабеля в корпусе преобразователя предусмотрено отверстие, закрываемое пробкой 4.
Выходная мощность пьезоэлектрических преобразователей очень мала, поэтому на выходе преобразователя должен быть включен усилитель с возможно большим входным сопротивлением.
Эквивалентная схема преобразователя, соединенного кабелем с измерительной цепью, представлена на рис. 6-5, б, на котором С0 — емкость между
гранями пьезоэлектрика (емкость преобразователя); Ск — емкость кабеля между жилой и экраном и Свх — входная емкость измерительной цепи; R0—сопротивление преобразователя; RK — сопротивление изоляции кабеля; Rrx — входное сопротивление измерительной цепи.
Эквивалентную схему можно упростить согласно рис.6-5, в, где сопротивление R равно сопротивлению параллельного соединения /?0> RK и /?вх и емкость С= С0 + Ск+ Свх.
| О 4 8 12 16 20 Гц |
| Рис. 6-5 |
При синусоидальной силе f = Fm sin сot мгновенный ток i = = dqldt = d (duFm sin сot)/dt. Выходное напряжение преобразователя
с подключенной к нему измерительной цепью1 составляет £/вых =
[/НрщУ' где 1 = /wdllJp; = Ц©/?/(1+/©/?С)].
Как видно из последнего выражения, амплитуда напряжения и сдвиг фаз между напряжением и измеряемой силой зависят от частоты:
Um^=dUcm VTlSm'- «P = «/2 + arctg®/?C. (6-1,
Амплитудно-частотная и фазо-частотная характеристики преобразователя, включенного в измерительную цепь, представлены на рис. 6-5, г. Из приведенных выражений следует, что напряжение на входе усилителя не будет зависеть от частоты только при высоких частотах со> 1 /(RC) и будет равно 0ВЫХ = duF/C.
Из этого выражения видно, что выходное напряжение преобразователя зависит от емкости входной цепи. Поэтому если в характеристиках преобразователя указывается его чувствительность по напряжению, то обязательно должна быть указана и емкость, соответствующая этой чувствительности. В ряде случаев указывается чувствительность по заряду Sg = q/F и собственная емкость преобразователя С0 или напряжение холостого хода £/х.х = dnF/C0 и также собственная емкость преобразователя. Во всех случаях, зная суммарную емкость С, можно рассчитать выходное напряжение преобразователя.
Для расширения частотного диапазона измеряемых величин в сторону низких частот, очевидно, следует увеличить постоянную времени цепи т = RC. Для того чтобы получить представление о значениях сопротивлений и емкостей, на рис. 6-5, д приведены кривые 1 и 2 чувствительности пьезоэлектрического акселерометра в функции частоты для различных сочетаний R и С. Расширение частотного диапазона путем увеличения емкости С (кривая 2) легко осуществляется включением параллельно преобразователю конденсаторов, однако, как видно из формулы (6-1), это приводит к уменьшению выходного напряжения преобразователя. Увеличение сопротивления R приводит к расширению частотного диапазона без потери чувствительности, однако повысить сопротивление можно только путем улучшения качества изоляции и применения усилителей с высокоомным входом.
Собственное сопротивление пьезоэлемента R0 определяется удельным сопротивлением материала пластин и их поверхностным сопротивлением. Первая составляющая, в особенности для кварца (1015 — 1016 Ом), как правило, значительно больше второй, поэтому определяющим является поверхностное сопротивление, для повышения которого до R = 109 ч- Ю10 Ом преобразователь приходится герметизировать, защищая его поверхности от влажности и загрязнения.
До недавнего времени измерительные цепи пьезодатчиков выполнялись в виде усилителей напряжения с высокоомным входом. Пример такой измерительной цепи показан на рис. 6-6, а. В этой цепи используется неинвертирующий усилитель на основе операционного усилителя с входным каскадом на полевом транзисторе. Напряже-
Т7 Я JtoRC
ние, поступающее. на вход усилителя, равно ивк=* сТ+/д>кс '
выходное напряжение С = С0 + Ск + С|_.
Date: 2015-09-18; view: 1339; Нарушение авторских прав