Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
ЭЛЕКТРОСТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ 7 page
|
|
Для измерения частоты вращения используются также ^-преобразователи с неподвижной обмоткой. Принцип действия такого преобразователя показан на рис. 8-45, б. В этом преобразователе постоянный магнит и катушка, содержащая две полуобмотки с числом витков ш, неподвижны.. При вращении ротора происходит перераспределение
магнитного потока постоянного магнита: увеличивается поток через полюс магнитопровода, под которым проходит зубец ротора, и уменьшается поток через полюс, под которым проходит паз ротора. Поток постоянного магнита остается при этом неизменным, так как полное магнитное сопротивление для суммарного потока остается почти постоянным. Таким образом, в части магнитопровода, образованной полюсами 1 и 2 и ротором, за счет изменения размагничивания полюсов при вращении ротора появляется переменная составляющая магнитного потока, и в катушке индуктируется ЭДС, частота Q которой определяется частотой вращения QMX и числом п зубцов ротора: Q = nQMX, а амплитуда Ет = 20ДФмш, где ДФМ — амплитуда переменной составляющей потока. В подобных преобразователях в качестве выходной величины чаще используется не ЭДС, а частота.
|
Индукционные преобразователи параметров вибрации. Принцип действия преобразователя виброскорости поясняется рис. 8-46, а. В катушке, колеблющейся в зазоре, индуктируется ЭДС е = = QXmBNwlcp sin Q/, где QXm sin Q/ = х' — скорость катушки, совершающей колебания х = Хт cos Qt\ BN — индукция в зазоре; w и — число витков и средняя длина витка.
Если индукция в зазоре преобразователя составляет В^ ~ 0,5 Тл, диаметр обмотки d — 20 мм, площадь окна, заполняемого проводом, S0KH =(1X5) мм, то, выбрав провод диаметром 0,05 мм (w' = 180 витков/мм2), можно получить коэффициент преобразования kv — 10 В/(м/с), н амплитуда выходного напряжения преобразователя, подвижная часть которого совершает колебания с амплитудой Хт = = 1 мм и частотой f ~ 10 Гц, составляет 0,630 В.
|
Чтобы получить значение виброперемещения или виброускорения, выходной сигнал подается соответственно на интегрирующий или дифференцирующий усилитель. Во избежание нелинейных искажений
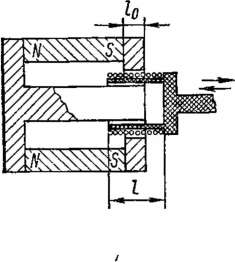
выходного электрического сигнала, повторяющего по форме входной механический сигнал, усредненное по всем виткам значение индукции при колебаниях катушки должно оставаться постоянным. Для этих целей длина катушки I выбирается или меньше ширины зазора /0 так, чтобы при колебаниях катушка не доходила до его краев, или больше ширины зазора так, чтобы края катушки были всегда за пределами зазора (см. §8-2 и 8-4). Обычно индукционные преобразователи применяются для измерения параметров вибраций в диапазоне частот 1—50 Гц при амплитуде вибраций не более 1—5 мм. Чувствительность индукционных преобразователей сейсмоприемников достигает 140 В/(м/с) (например, для СК-1П).
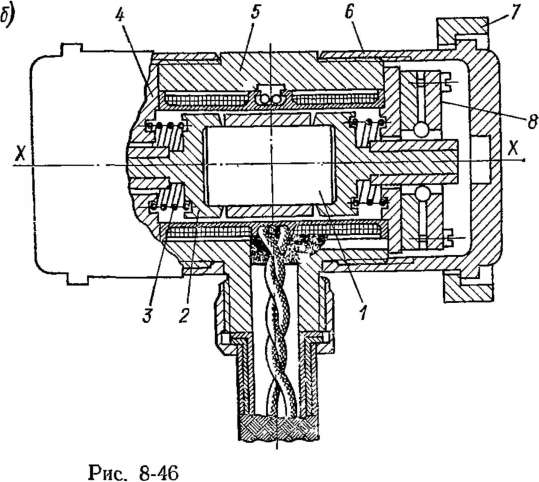
Устройство датчика виброметра показано на рис. 8-46, б. По измерительной оси хх расположена подвижная часть, представляющая
|
| еВых |
| Рис. 8-47 |
собой магнит 1 и полюсные наконечники 2. Подвижная часть крепится в подшипниках 5, ограничивающих ее перемещения по осям, перпендикулярным измерительной, и поджимается пружинами 3. Измерительная обмотка, состоящая из двух половин, намотана на медный каркас 4 и укреплена в стальной обойме 5, которая одновременно служит корпусом. Датчик закрывается крышками 6 и при помощи фланца 7 крепится к объекту измерения. Магнитные поля в рабочих зазорах, в которых расположены измерительные полуобмотки, направлены встречно; благодаря этому уменьшается погрешность от влияния внешнего магнитного поля. Медный каркас за счет наводимых в нем при движении магнита токов служит для увеличения коэффициента успокоения (см. § 8-5).
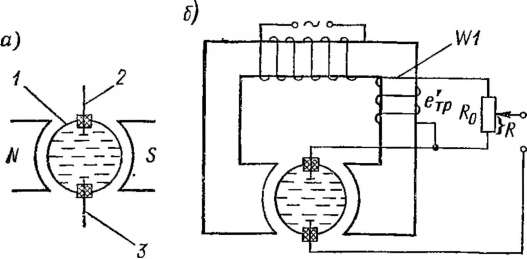
Индукционные преобразователи расходомеров. Принцип действия индукционного преобразователя расходомера поясняется рис. 8-47, а. В потоке жидкости, движущейся в трубопроводе 1 из немагнитного материала между полюсами магнита, возникает ЭДС, значение которой ■ пропорционально скорости движения потока: е = BDvf где В — магнитная индукция; D — диаметр трубы; v — скорость движения жидкости. Эта ЭДС снимается с помощью электродов 2 и 3, изолированных от трубопровода.
Как видно из приведенного уравнения, генерируемая в преобразователе ЭДС не зависит от свойств жидкости, и поэтому индукционные расходомеры принципиально могут быть применены для самого широкого класса жидкостей, идиако свойства жидкостей определяют внутреннее сопротивление преобразователя и возможности дальнейшего точного преобразования и измерения ЭДС, поэтому в технических характеристиках расходомера всегда указывается минимальная электрическая проводимость жидкости, для измерения расхода которой он может быть применен.
Индукционные расходомеры используются для измерения скоростей жидких металлов (жидкости с электронной проводимостью), водных растворов (жидкости с ионной проводимостью), и, кроме того, делаются попытки применить их для измерения скоростей диэлектрических жидкостей. Индукционные преобразователи расходомеров промышленного назначения имеют чувствительность 0,5—-1,5 мВ/(м/с). Диаметр трубопроводов может быть весьма значительным, и поэтому для создания магнитного поля используются обычно не постоянные магниты, а электромагниты. В расходомерах для жидких металлов применяются электромагниты, питаемые постоянным током. В расходомерах для воды и электролитов используются электромагниты (рис. 8-47, 6), питаемые для исключения напряжения поляризации только переменным током (частота 10—1000 Гц). В этом случае выходной сигналов = BmDv sin соt также является переменной ЭДС и из него легко могут быть исключены гальванические и термо-ЭДС. Однако в переменном магнитном поле, кроме ЭДС, обусловленной движением контура, будет индуктироваться ЭДС ехр = —д*¥Idt = = соBmSK cos со£, называемая трансформаторной.
Для того чтобы уменьшить трансформаторную ЭДС, провода вторичного контура стремятся расположить так, чтобы площадь SIt сцепления контура с переменным потоком была минимальной. Положение проводников, находящихся в поле, должно быть строго фиксировано, чтобы величина 5К не изменялась. В контур вводятся специальные компенсационные петли (обмотка W1 на рис. 8-47, б), в которых наводится ЭДС е'тр, включаемая встречно с ЭДС егр и регулируемая так, чтобы е-гр — e'rpR/R0 «0.
Кроме того, помеха в виде трансформаторной ЭДС и полезная ЭДС, пропорциональная скорости движения, как видно из приведенных выражений, сдвинуты по фазе на угол л/2 и могут быть разделены "на выходе фазочувствительным усилителем.
8-11. МАГНИТОМОДУЛЯЦИОННЫЕ ПРЕОБРАЗОВАТЕЛИ
Магнитомодуляционными называются преобразователи, действие которых основано на изменении магнитного состояния ферромагнитного материала при одновременном намагничивании в постоянном и переменном полях. Модуляция магнитным потоком возможна за счет нелинейных свойств магнитной цепи (см. § 8-1 и 8-2).
Магнитомодуляционные преобразователи (ММП) широко используются в счетно-решающей технике в качестве логических элементов и запоминающих устройств. В измерительной технике ММП применяются для измерения напряженности постоянного магнитного поля (феррозонды), для преобразования постоянного тока в переменный с уменьшением абсолютного значения тока (измерительные трансформаторы постоянного тока), для преобразования постоянного тока в переменный с увеличением абсолютного значения тока (магнитные усилители), для измерения перемещения объекта, с которым связывается подвижная часть преобразователя, несущая постоянный магнит (маг* нитомодуляционные преобразователи перемещения).
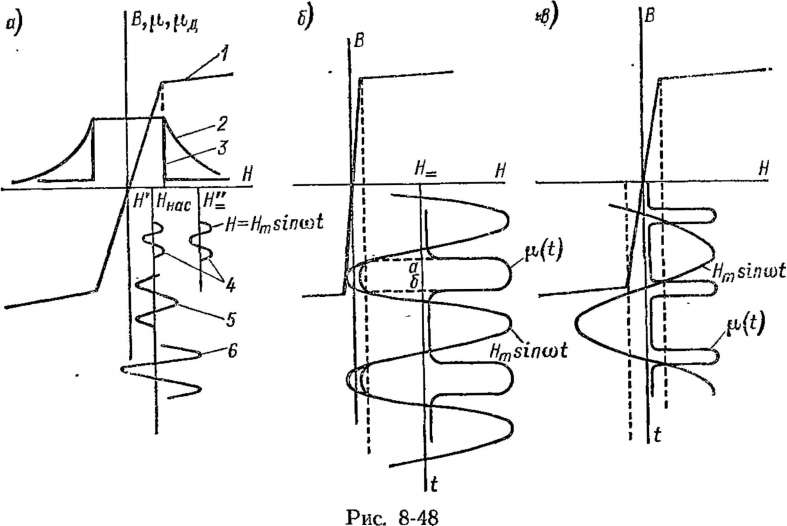
На рис. 8-48, а представлена упрощенно в виде ломаной линии 1 основная кривая намагничивания В = f (Н) ферромагнитного материала; там же показана кривая 2 магнитной проницаемости \х (Н) = = В/Н и кривая 3 дифференциальной магнитной проницаемости
|
|ад (//) = dBIdH. На этом же рисунке даны кривые 4, 5, и 6 напряжен- ностей переменного магнитного поля Н = Нт sin со/, наложенного на постоянное с напряженностью //„. При этом напряженность переменного поля может быть много меньше напряженности постоянного поля (кривая 4), сравнима с ней по значению (кривая 5) или больше ее (кривая 6), а напряженность постоянного магнитного поля может быть как меньше, так и больше напряженности насыщения НПйС.
Для магнитной цепи ММП характерны три различных режима работы: а) и меньше //нас; б) //_ ^ #ШС1 ^ Hj,;
в) > Янас, //_ <; В первом режиме, показанном на
рис. 8-48, а, магнитное сопротивление переменному потоку зависит от величины и при < Я. может быть определено дифференциальной магнитной проницаемостью [ад. При сравнимых величинах и #_ для анализа работы магнитной цепи используются характеристики двойного намагничивания Вт = f (Нт, £=), приводимые ниже на рис. 8-49.
Во втором режиме (рис. 8-48, б) модулирующим является постоянное поле, сердечник находится в режиме насыщения и выходит из него лишь в те полупериоды переменного напряжения, когда напряженность Н_ направлена навстречу Н„ и достигает такого значения, что результирующая напряженность оказывается меньше напряженности насыщения. Таким образом, для переменного магнитного поля сердечник работает в ключевом режиме, включаясь на отрезке времени аб, когда Н_ + Я^ ^ 0. Всю остальную часть периода магнитная Проницаемость сердечника, показанная на рис. 8-48, б кривой \i (t), мала; обмотка, по которой проходит переменный ток, имеет малую Индуктивность L = w*IZK = \mPSUm и лишь на участке аб магнитная проницаемость и индуктивность резко возрастают.
В третьем режиме модулирующим является переменное поле. Для постоянного магнитного поля сердечник работает в ключевом режиме,
|
менного поля находится в диапазоне, ограниченном штриховыми прямыми (рис. 8-48, в). Действительно, в ту часть периода, когда Н^ < #нас, магнитная проницаемость сердечника велика и он является для постоянного потока нормальным ферромагнетиком с магнитной проницаемостью р, = (103 -г- Ю5).р0т а в ту часть периода, когда Н_ > #пас, магнитная проницаемость сердечника падает до значения ц, ~ (\0 ~ 1) р,0 и он как бы отсутствует для постоянного магнитного поля. Кривая |Li = / (t) также показана на рис. 8-48, в.
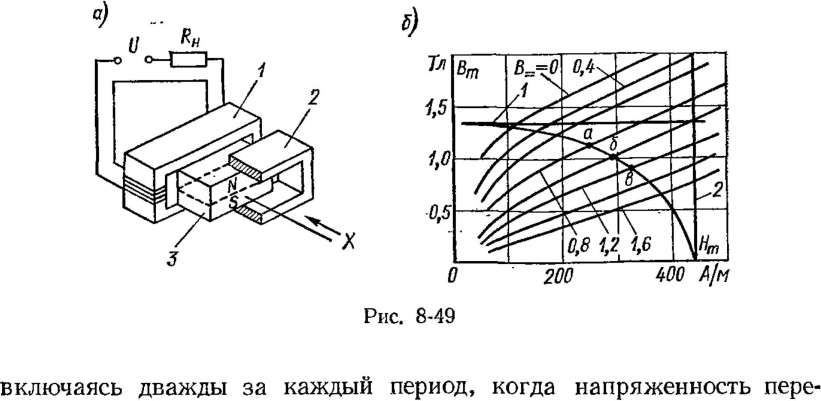
Магнитомодуляционные преобразователи перемещения. Принцип действия преобразователя показан на рис. 8-49, а. Между двумя сердечниками / и 2 из листовой стали расположен постоянный магнит 3. Поток, создаваемый магнитом, замыкается через сердечники. При симметричном положении магнита потоки через сердечники равны и, следовательно, в каждом из сердечников действуют одинаковые индукции постоянного подмагничивания, равные В = 0,5аФ^/(25серд), где Ф„ — поток магнита; сг — коэффициент рассеяния и 5серд — площадь сечения сердечника. На сердечник 1 намотана обмотка с числом витков w9 а сердечник 2 служит магнитным шунтом. Обмотка через резистор подключена к источнику переменного тока 50 Гц. При перемещении магнита влево индукция в сердечнике 1 увеличивается и магнитная проницаемость материала падает. Магнитное сопротивление переменному потоку возрастает, индуктивность обмотки падает, ток и падение напряжения на резисторе RH увеличиваются. Таким образом, входной величиной преобразователя является перемещение магнита, а выходной — падение напряжения на резисторе Ru. Характеристики двойного подмагничивания для листовой стали приведены на рис. 8-49,6.
В том случае, если сердечник 1 находится по переменному потоку в режиме заданной индукции, т. е. R = Ru + Rw — О (Rw — активное сопротивление обмотки) и все напряжение питания уравновешивается противо-ЭДС обмотки, напряженность в материале и, следовательно, определяющий ее ток характеризуются при изменении Я_ точками пересечения прямой 1 с семейством приведенных характеристик. Если сердечник 1 находится в режиме заданной напряженности, т. е. Ru oL и ток через обмотку не зависит от изменения ее противо- ЭДС, то переменная индукция в сердечнике и связанная с ней противо- ЭДС определяются точками пересечения прямой 2 с семейством характеристик. В реальном случае нагрузочная кривая описывается уравнением эллипса
(Вт/В'тГ + (Нт/Н'ту= 1,
где В'т = j/2 (7/(сош5серд); Н'т = 1^2 /ш//серд = j/2 Uw/(lcepnR); В'т — амплитудное значение индукции в режиме заданного напряжения; Н'т — амплитудное значение напряженности в режиме заданного тока; U — действующее напряжение питания; w — число витков обмотки; со — частота; 5серд и /серд — площадь поперечного сечения сердечника и длина магнитной линии по сердечнику.
В качестве примера построим эллипс нагрузки и рассчитаем изменение тока при изменении индукции в сердечнике от В_ = 0,8 Тл до В_ = 1,2 Тл. Размеры преобразователя: толщина сердечника h = 3 мм, ширина 6=10 мм, периметр 50 мм. Число витков в обмотке w ~ 200, сопротивление R = 25 Ом. Получим
Rr _ \f 2 V_________ \Г2 ■ 2,0_____
m ~ со^серд ~ 2л - 50 - 200 - 3 - 10 • 10-б~ ^ л'
„л V'2Uw ^2 - 200-2,0... л/ = 50-10-3.25 ^448 А/М'
Точки а, б ив эллипса нагрузки соответствуют и апр яже нностям На — 242 А/м,- Н6 = 288 А/м и Не = 325 А/м. Эти напряженности соответствуют токам, определяемым формулой I = Hmtcepjl/(V2 w) и равным
I =22°-j°'10"3^43 мА; Ь=49 мА и / =58 мА. \Г2 -200 °
Вопросы расчета и проектирования ММП перемещения подробно рассмотрены JI. Ф. Куликовским и В. Г. Жировым.
Измерительные трансформаторы постоянного тока (ИТПТ) применяются для измерения больших постоянных токов, а также токов и напряжений в высоковольтных цепях постоянного тока.
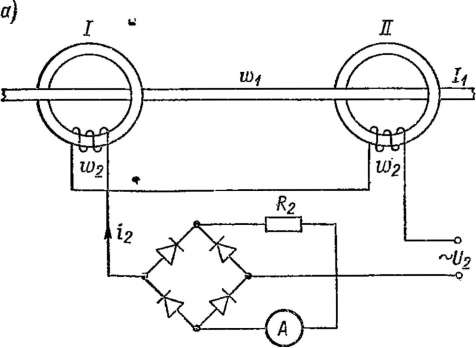
ИТПТ (рис. 8-50, а) состоит из двух одинаковых замкнутых ферромагнитных сердечников из магнитомягкого материала с прямоугольной кривой намагничивания, которые имеют общую первичную обмотку с числом витков Wi = 1, представляющую собой шину, по которой проходит измеряемый постоянный ток, и отдельные вторичные обмотки с числом витков w2, равномерно намотанные на свои сердечники. Вторичные обмотки включаются последовательно-встречно к вспомогательному источнику переменного тока, а протекающий по ним ток i2 обычно выпрямляется и измеряется магнитоэлектрическим амперметром.
| Рис. 8-50 |
Магнитная цепь ИТПТ работает в режиме насыщения по постоянному магнитному потоку и выходит из этого режима, только когда
| в Ат А А" | |
| hw< | iw |
| t |
напряженность встречно направленного переменного магнитного поля компенсирует напряженность постоянного магнитного поля (рис.8-48,е).
На рис. 8-50, б изображена идеализированная прямоугольная кривая намагничивания сердечников и показаны МДС, действующие в сердечниках. Под действием МДС lxwx оба сердечника насыщаются. Току 11 соответствует начальная рабочая точка А на участке насыщения кривой намагничивания. Если ток увеличивается, точка А смещается вправо (Л"); при уменьшении /± точка А смещается влево (А'). Ось времени для переменной МДС i2w2 совмещена с вертикальной линией, проходящей через точку А.
Рассмотрим полупериод тока, когда в сердечнике / первичная I1w1 и вторичная i2w2 МДС вычитаются, а в сердечнике 11 •— суммируются. При суммировании МДС индукция в сердечнике остается неизменной, равной индукции насыщения £нас. При вычитании МДС индукция остается неизменной, лишь пока i2w2 < liWx. При равенстве МДС происходит изменение индукции и в обмотке сердечника I индуктируется ЭДС, встречная приложенному напряжению и уравновешивающая его. Таким образом, во вторичной обмотке ток не может превысить значения i2 = lxwjw2. Если допустить, что активные сопротивления полуобмоток, надетых на сердечники / и //, равны нулю, то ток
независимо от значения приложенного напряжения мгновенно возрастает до значения i2 = Iiwjw2y при котором «включается» противо- ЭДС, и кривая вторичного тока, как и показано на рис. 8-50, б, имеет прямоугольную форму. В следующий полу период вследствие встречного включения вторичных обмоток вычитание МДС происходит в сердечнике //, в обмотке которого индуктируется ЭДС, уравновешивающая приложенное напряжение.
Как видно из принципа действия ИТПТ, никакой трансформации энергии не происходит, а имеет место уравновешивание МДС. Среднее значение выпрямленного тока /2ср, протекающего через амперметр, определяется из равенства МДС: /2ср = I^udJw2.
Форма вторичного тока не зависит от формы и частоты вспомогательного напряжения, а также от его значения, если оно выбрано таким образом, чтобы изменение магнитной индукции ДВ в сердечниках было меньше двойного значения индукции насыщения £нас. Последнее эквивалентно условию Вт <С Внас, где Вт — амплитуда переменной индукции в сердечниках при /х = 0, определяемая из выражения = 1^2 ^/2/(4я/^25серд), где 5серд — площадь сечения сердечника; U2 — действующее напряжение вспомогательного источника.
Если ДБ;> 2£нас, может произойти повторное насыщение работающего сердечника в нижней части цикла перемагничивания и оба сердечника окажутся в состоянии насыщения. При этом вторичный ток перестает зависеть от измеряемого первичного тока и ограничивается только сопротивлением вторичных обмоток. Обычно U2 выбирают из условия Вт = (0,9 -т- 0,75) Виас.
Погрешности ИТПТ с последовательным соединением вторичных обмоток главным образом обусловлены отличием реальной петли перемагничивания сердечников от идеальной прямоугольной петли и в меньшей степени конечным значением сопротивления вторичной цепи ИТПТ.
Для работы в низковольтных-цепях до 1000 В в СССР выпускаются ИТПТ с номинальным первичным током 5; 7,5; 10; 15; 25 и 35 кА, с основной погрешностью 0,5%. Номинальный вторичный ток 5 А. Для измерения постоянных токов в высоковольтных цепях выпускаются ИТПТ с номинальным первичным током 1; 2 и 4 кА. Известны также ИТПТ с пределами измерений до 100 кА и разъемным магнито- проводом, что дает возможность производить их монтаж без разрыва цепи измеряемого тока.
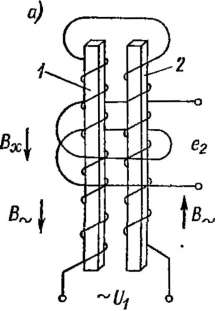
Феррозонды. На рис. 8-51 изображена схема дифференциального феррозонда, состоящего из двух ферромагнитных сердечников J и 2 из железоникелевого сплава, на каждом из которых имеется модулирующая обмотка с числом витков Обмотки питаются от источника переменного тока. Обмотки включены последовательно, но встречно, так что создаваемые ими переменные магнитные потоки сдвинуты на 180°. Оба сердечника с модулирующими обмотками охватывает измерительная обмотка с числом витков w2. При идентичности сердечников вследствие встречного включения модулирующих обмоток в измерительной обмотке не будет индуктироваться ЭДС. Напряженность переменного магнитного поля Нш = (3v 5)#иас. Таким образом, мате
риал сердечников работает в режиме, соответствующем рис. 8-48, в. Магнитная проницаемость обоих сердечников изменяется одинаково и, как видно из рис. 8-48, в, два раза за период возрастает до максимального значения. ■
Если феррозонд поместить в постоянное магнитное поле с индукцией Bv, то условно можно считать, что в это поле дважды за период
| fi* J |
| е2 |
| А |
| * Рис. 8-51 |
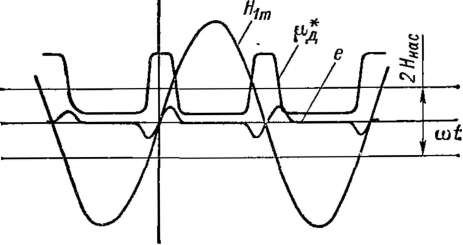 Рис. 8-52
Рис. 8-52
|
вносится концентратор по-
s)
ля и возникающие импульсы индукции наводят ЭДС в измерительной обмотке.
На рис. 8-52 показаны кривые, поясняющие работу четногармонического феррозонда. Из рисунка видно, что р-д периодически изменяется от максимального (при Н1т с Янас) до минимального (при Н1т > > Нтс) значения. Проницаемость сердечников меняется с удвоенной частотой, в результате чего в измерительной обмотке возникает ЭДС удвоенной частоты, пропорциональная индукции Вх и скорости изменения При изменении полярности Вх выходная ЭДС изменяет фазу на 180°.
Обычно в качестве информативного параметра используется амплитуда второй гармоники выходной ЭДС.
Наиболее широкое применение получили феррозонды с продольным возбуждением с разомкнутой (рис. 8-51, а) или замкнутой (рис. 8-51, б) магнитной цепью.
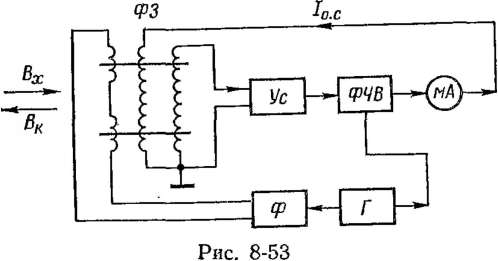
На рис. 8-53 показана структурная схема измерительной цепи феррозон- дового тесламетра. Феррозонд ФЗ питается от генератора переменного тока Г с частотой / = 500 -г- 5000 Гц. Для снижения уровня четных гармоник в токе возбуждения между генератором и феррозондом включен фильтр нижних частот Ф, имеющий наибольшее затухание на частоте второй гармоники. Для выделения сигнала второй гармоники используется избирательный усилитель Ус, настроенный на частоту 2/, и фазочувствительный выпрямитель ФЧВ, на выходе которого включен показывающий или регистрирующий прибор. В тесламетрах на низкие пределы измерения (10 нТл) коэффициент
усиления по второй гармонике составляет 105, а ослабление первой и третьей гармоник в избирательном усилителе должно быть не менее 60 дБ. Для расширения диапазона измерений и улучшения метрологических характеристик (уменьшение нелинейности и инерционности и др.) в тесламетре используется цепь обратной связи, сигнал с которой подается на обмотку обратной связи феррозонда и создает магнитное поле с индукцией Бк, компенсирующее измеряемое.
Основной проблемой при построении высокочувствительных тесла- метров является снижение наводок и шума. Для этой цели применяются хорошо защищенные от наводок измерительные цепи, обладающие высокой избирательностью, датчики феррозондов специальным образом симметрируются, чтобы исключить ЭДС взаимоиндуктивности между первичной и вторичной обмотками. Источниками шумов феррозондов являют- -ся несимметрия петли гистерезиса и магнитный шум Баркгаузена (см. § 8-1 и 8-12). Феррозонд представляет собой один из наиболее чувствительных магнитоизмерительных преобразователей. Нижний предел измерения в лучших преобразователях составляет 0,05—0,1 нТл. Верхний предел измерения ограничен нарушением линейности функции преобразования и обычно не превышает 5-10"4 Тл. Для измерений более сильных полей применяется метод уравновешивания, при котором феррозонд используется в качестве преобразователя неравновесия.
Феррозонды применяются для измерения магнитной индукции слабых постоянных и медленно изменяющихся (с частотой не более 100 Гц) магнитных полей, для измерения углов между какими-либо осями -объекта и вектором магнитной индукции, для обнаружения ферромагнитных объектов, для измерения магнитной восприимчивости и магнитного момента слабомагнитных веществ. Благодаря высокой чувствительности, простоте конструкции, малым габаритам и высокой надежности феррозондовые преобразователи широко используются в качестве портативных авиационных и ракетных тесламетров, градиентометров и угломеров при исследовании магнитного поля Земли, космического пространства, в магнитных системах навигации и ориентации, в магнитной дефектоскопии и при поиске полезных ископаемых.
8-12. ПРЕОБРАЗОВАТЕЛИ НА ОСНОВЕ ЭФФЕКТА БАРКГАУЗЕНА
|
Неоднородность структуры ферромагнитного образца обусловлена, немагнитными включениями или локальными механическими включениями и вызывает скачки намагниченности при изменении внешнего магнитного поля или наличии меха
нических воздействий. Схематическое изображение доменных границ и некоторого вилючения показано на рис. 8-54, а. Граница между двумя доменами с противоположным направлением векторов намагниченности под воздействием внешнего магнитного поля сначала обратимо изменяет свое положение (рис. 8-54, б), а затем скачком переходит в новое положение (рис. 8-54, в). Заштрихованная часть представляет собой область, скачком изменившую свою намагниченность.

|
| Рис. 8-55 |
Экспериментальные исследования скачков Баркгаузена (СБ) показали, что в железном образце средний объем перемагничивающейся области лежит в диапазоне 2* 10~2 — 2* 10"7 мм3.
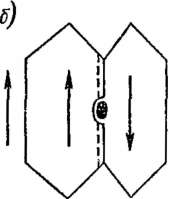 Рис. 8-54
Рис. 8-54
|
Ф
Вклад СБ в общее изменение намагниченности по данным различных авторов составляет 30—50%. Длительность СБ лежит в диапазоне 0,1—1 мс. При скачках Баркгаузена в измерительной катушке возникают импульсы ЭДС. Таким образом, перем-агничивание образца сопровождается появлением в измерительной обмотке сигнала, имеющего характер случайного процесса.
Очень важной дли проектирования преобразователей на основе эффекта Баркгаузена является зависимость этого эффекта от скорости перемагничивания. С увеличением скорости перемагничивания от 0,01 до 0,24 А/(м«с) число скачков падает примерно на 45%. Этот факт указывает на возможность слияния нескольких скачков, что приводит к зависимости характеристик преобразования от скорости или
частоты перемагничивания.
В зависимости от скорости перемагничивания измерительные преобразователи с использованием эффекта Баркгаузена могут быть разбиты на две группы: с пространственным перемагничи- ванием ферромагнетика и с перемагничиванием ферромагнетика изменяющимся во времени магнитным полем.
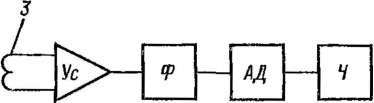
Принцип действия преобразователя с пространственным перемагничиванием ферромагнетика показан на рис. 8-55, а. Мимо постоянного магнита 1 движется со скоростью vx ферромагнитный образец 2. Участок образца, находящийся вблизи магнита, намагничен, и границы этого участка смещаются со скоростью vx. В проходной или накладной измерительной катушке 3, установленной неподвижно, индуктируются импульсы ЭДС, вызываемые скачками Баркгаузена (см. рис. 8-3). Индуктируемая ЭДС представляет собой стационарный случайный процесс (рис. 8-55, б). В качестве информативных параметров этого процесса используются средняя частота выбросов, превышающих заданный уровень, или дисперсия, которые зависят от скорости перемагничивания, т. е. от скорости движения образца. Сигнал измерительной обмотки 3 (рис. 8-55, а) усиливается и подается на полосовый фильтр Фя
подавляющий низкочастотную и высокочастотную части спектра для выделения полезного сигнала. Амплитудный дискриминатор АД выделяет импульсы, амплитуда которых превышает заданный уровень, и сигнал поступает на частотомер Ч, показания которого пропорциональны скорости.
Преобразователь тахометра, основанный на эффекте Баркгаузена, показан на рис. 8-56, а. На вращающемся валу закреплен ротор 1 из ферромагнитного материала. На статоре 2 укреплены магниты под каждым магнитом помещены измерительные катушки 4. На рис. 8-56, б показаны схематически система магнит—на-
Date: 2015-09-18; view: 1122; Нарушение авторских прав