Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Основные соотношения для двигателей постоянного тока
|
|
Уравнение напряжений для цепи якоря по второму закону Кирхгофа
 (2.4)
(2.4)
|
|
|
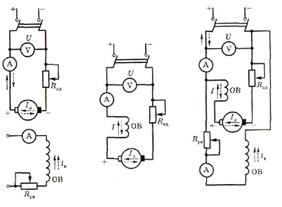
Рис 2.1. Схемы включения двигателей:
а – независимого возбуждения; б – последовательного возбуждения;
в – смешанного возбуждения; сплошные стрелки – направления токов в генераторном режиме, штриховые – в двигательном
ЭДС обмотки якоря и момент
 (2.5)
(2.5)
Уравнение электромеханической характеристики
 (2.6)
(2.6)
Уравнение механической характеристики
 (2.7)
(2.7)
В формулах (2.4–2.7) обозначены: Ra – сопротивление самой обмотки якоря относительно внешних зажимов;  – добавочное сопротивление в цепи якоря;
– добавочное сопротивление в цепи якоря;  – ток обмотки якоря (рис. 2.1);
– ток обмотки якоря (рис. 2.1);  – постоянная для конкретной машины; p – число пар полюсов; N – число эффективных проводников обмотки якоря;
– постоянная для конкретной машины; p – число пар полюсов; N – число эффективных проводников обмотки якоря;  – угловая скорость; Ф – магнитный поток в зазоре,
– угловая скорость; Ф – магнитный поток в зазоре,  ;
;  – коэффициент полюсной дуги, = 0,6 ÷ 0,75;
– коэффициент полюсной дуги, = 0,6 ÷ 0,75;  – полюсное деление,
– полюсное деление,  ;
;  ,
,  – диаметр и длина якоря соответственно;
– диаметр и длина якоря соответственно;  – индукция в зазоре,
– индукция в зазоре,  = (0,7 ÷ 1,0) Тл;
= (0,7 ÷ 1,0) Тл;  0 – скорость идеального холостого хода,
0 – скорость идеального холостого хода,  ;
;  – снижение скорости под влиянием нагрузки.
– снижение скорости под влиянием нагрузки.
Из (2.6, 2.7) видно, что для двигателя независимого возбуждения при неизменных  характеристики представляются прямыми линиями, а их жесткость зависит от сопротивления якорной цепи
характеристики представляются прямыми линиями, а их жесткость зависит от сопротивления якорной цепи  и потока Ф. Следовательно, изменяя указанные параметры (U, Ф,
и потока Ф. Следовательно, изменяя указанные параметры (U, Ф,  ), можно регулировать скорость электропривода.
), можно регулировать скорость электропривода.
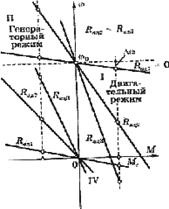
На рис. 2.2 представлены механические характеристики двигателя независимого возбуждения в различных режимах работы при  . При
. При 
 характеристика называется естественной, а остальные – искусственные
характеристика называется естественной, а остальные – искусственные  . Естественная характеристика является жесткой, относительный статический перепад скорости
. Естественная характеристика является жесткой, относительный статический перепад скорости  . При U= const, Ф = const,
. При U= const, Ф = const,  все характеристики выходят из одной точки на оси ординат – щ, скорости идеального холостого хода, когда
все характеристики выходят из одной точки на оси ординат – щ, скорости идеального холостого хода, когда  = 0, U= Е. Из графика же следуют и режимы работы (рис. 2.3).
= 0, U= Е. Из графика же следуют и режимы работы (рис. 2.3).
|
|
|
|
|
|
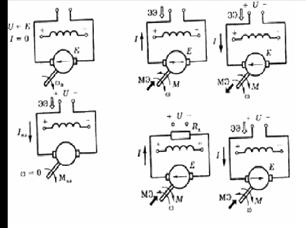
Рис. 2.3. Энергетические режимы ДПТ
независимого возбуждения:
а – холостой ход; б – двигательный; в – генераторный параллельно
с сетью; г – короткое замыкание; д – генераторный последовательно
с сетью; е – генераторный независимо от сети
I квадрант. Двигательный режим – электрическая энергия потребляется из сети и преобразуется в механическую, (рис. 2.3, б).

II квадрант. Генераторный режим – энергия (механическая) поступает с вала и преобразуется в электрическую. При этом она может отдаваться в сеть (рекуперация) при  или рассеиваться в реостатах (динамическое или реостатное торможение) (рис. 2.3, в, е). В режиме рекуперации М< О,
или рассеиваться в реостатах (динамическое или реостатное торможение) (рис. 2.3, в, е). В режиме рекуперации М< О,  . При динамическом торможении
. При динамическом торможении  , ток
, ток  М<0. Практически, якорь отключается от сети и замыкается на сопротивление R (рис. 2.3, е).
М<0. Практически, якорь отключается от сети и замыкается на сопротивление R (рис. 2.3, е).
III квадрант. Режим двигателя – обратное вращение,
М<0,  .
.
IV квадрант. Режим генератора или противовключения – энергия поступает как из сети (электрическая), так и с вала (механическая) и полностью рассеивается в сопротивлении якорной цепи. Ток  необходимо ограничивать выбором сопротивления (рис. 2.3, д).
необходимо ограничивать выбором сопротивления (рис. 2.3, д).
Date: 2015-08-06; view: 2037; Нарушение авторских прав