Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
С помощью резисторов в якорной цепи
|
|
Этот способ, называемый реостатным, является самым простым по реализации, поэтому применяется для регулирования скорости, тока и момента, но по отношению к току и моменту более правильно говорить об их ограничении.
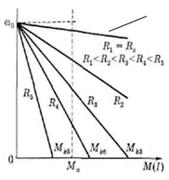
Варьируя сопротивление добавочного резистора  в цепи якоря (см. рис. 2.1), получают семейство искусственных характеристик (см. рис. 2.2, 2.4). При этом величина
в цепи якоря (см. рис. 2.1), получают семейство искусственных характеристик (см. рис. 2.2, 2.4). При этом величина  не зависит от сопротивления
не зависит от сопротивления  при независимом возбуждении
при независимом возбуждении

при последовательном ось  является асимптотой для всех характеристик. Наклон характеристик, определяемый перепадом скорости
является асимптотой для всех характеристик. Наклон характеристик, определяемый перепадом скорости

при конкретных значениях тока 1а и момента М, пропорционален сопротивлению цепи якоря (R= Ra +  ). Поэтому с увеличением характеристики становятся более мягкими,
). Поэтому с увеличением характеристики становятся более мягкими,  увеличивается. По выражению для строят реостатные характеристики двигателя независимого возбуждения по известным
увеличивается. По выражению для строят реостатные характеристики двигателя независимого возбуждения по известным  (см. рис. 2.6). Момент короткого замыкания (точка пересечения с осью абсцисс)
(см. рис. 2.6). Момент короткого замыкания (точка пересечения с осью абсцисс)

где  ток короткого замыкания,
ток короткого замыкания, 
|
 и семейство реостатных
и семейство реостатных  механических характеристик двигателя независимого возбуждения
механических характеристик двигателя независимого возбуждения
|
Оценка реостатного способа регулирования скорости по основным показателям (см. п.1.5).
1. Диапазон регулирования Д≤(2÷3). Причина низкого значения Д заключается в снижении жесткости, значительных потерях и низкой стабильности скорости.
2. Направление регулирования – вниз от естественной (однозонное).
3. Плавность регулирования определяется плавностью регулирования . Обычно это делают ступенями, а с ростом числа ступеней возрастает количество аппаратуры и усложняется управление.
4. Стабильность скорости невысокая и снижается по мере роста диапазона регулирования.
5. Экономичность регулирования оценивают по капитальным затратам на реализацию способа и стоимости потерь энергии при регулировании. Здесь следует говорить в основном о потерях мощности, особенно в настоящее время, когда цены на энергоресурсы неуклонно растут и принята Государственная программа по энергосбережению.
Потери мощности в ДПТ независимого возбуждения
 (2.8)
(2.8)
где  – относительный перепад скорости.
– относительный перепад скорости.
Видно, что при снижении скорости, например, в 2 раза, т. е.  = 0,5 и Д = 2, половина мощности теряется в цепи якоря, и КПД привода не превышает 50 % (при КПД самой машины
= 0,5 и Д = 2, половина мощности теряется в цепи якоря, и КПД привода не превышает 50 % (при КПД самой машины  ). Очевидно, что такой способ регулирования может быть рациональным только в маломощных приводах, когда удельный вес стоимости электроэнергии невелик.
). Очевидно, что такой способ регулирования может быть рациональным только в маломощных приводах, когда удельный вес стоимости электроэнергии невелик.
6. Допустимая нагрузка (момент на валу) по условиям нагрева
 (2.9)
(2.9)
равна номинальному моменту, если условия охлаждения такие же, как и в номинальном режиме, например, независимая вентиляция.
Уравнения естественной и реостатных электромеханических характеристик
 (2.10)
(2.10)
Отсюда скорость на искусственной характеристике при точке 
 (2.11)
(2.11)
По (2.11) строят реостатные характеристики, задаваясь значениями для конкретных  .
.
Обратная задача – когда по заданной искусственной характеристике или отдельной се точке находится соответствующее сопротивление резистора из соотношения
 (2.12)
(2.12)
Искусственные реостатные характеристики используются для ограничения тока и момента двигателей постоянного тока в переходных процессах и, в первую очередь, при пуске. В первый момент пуска двигатель находится в режиме короткого замыкания  и ток по естественной характеристике при этом
и ток по естественной характеристике при этом
т. к.
Допустимый же ток по условиям на коллекторе  для двигателей общепромышленного назначения (для тяговых машин, например, допускаются кратковременные перегрузки по току до
для двигателей общепромышленного назначения (для тяговых машин, например, допускаются кратковременные перегрузки по току до  ). Следовательно, ток (и момент) необходимо ограничивать, что и достигается введением резисторов в цепь якоря. Пуск обычно осуществляют ступенчато, шунтируя по мере разгона сопротивления контакторами (рис. 2.7).
). Следовательно, ток (и момент) необходимо ограничивать, что и достигается введением резисторов в цепь якоря. Пуск обычно осуществляют ступенчато, шунтируя по мере разгона сопротивления контакторами (рис. 2.7).
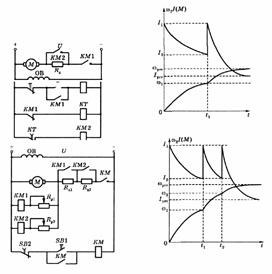
Рис.2.7. Пуск ДПТ независимого возбуждения:
а – в одну ступень; б – в две ступени
При этом ток и момент не остаются постоянными (рис. 2.7). Для достижения высокой плавности пуска используют импульсное регулирование пускового сопротивления, изменяя соотношение продолжительности открытого и закрытого состояния тиристора (см. рис. 3.2, г). Установившиеся значения тока  и скорости
и скорости  определяются величиной момента нагрузки.
определяются величиной момента нагрузки.
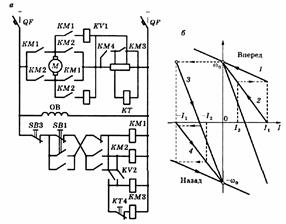
Рис. 2.8. Схема управления пуском ДПТ в зависимостиот
времени,реверсом и торможением противовключением
в зависимости от ЭДС(а): характеристики ДПТ
независимого возбуждения при пуске и реверсе (б)
Необходимость введения добавочного сопротивления в цепь якоря возникает также в режимах реверса и торможения противовключением (рис. 2.8). При этом пуск начинается при токе

в одну ступень. Разгон идет по характеристике 2 до значения тока  , затем резистор шунтируется и рабочая точка переходит на естественную характеристику 1, а ток изменяется до .
, затем резистор шунтируется и рабочая точка переходит на естественную характеристику 1, а ток изменяется до .
Для осуществления режима противовключения необходимо изменить полярность напряжения на якоре и ввести дополнительно к  резистор
резистор  д ля ограничения тока. Рабочая точка переходит из
д ля ограничения тока. Рабочая точка переходит из  (ось ординат) на характеристику 3. При этом ток
(ось ординат) на характеристику 3. При этом ток
 .
.
Далее двигатель тормозится, ток уменьшается, т. к. уменьшается ЭДС  . П ри достижении скорости
. П ри достижении скорости  , процесс торможения заканчивается, ток
, процесс торможения заканчивается, ток
 .
.
Если требуется после остановки запустить двигатель в обратную сторону, то переходят на характеристику 4 (реостатную), а затем на естественную (назад). Следовательно, реверс включает в себя торможение противовключением и пуск в противоположном направлении. На практике управление пуском, реверсом и торможением осуществляется в функции времени, тока, используя релейно-контакторные схемы [3, 4, 33].
На рис. 2.8, а приведена схема управления пуском, реверсом и торможением в зависимости от времени (пуск) и ЭДС. Главные контакты линейных контакторов КМ1, КМ2 образуют реверсивный мостик, обеспечивают изменение полярности напряжения на якоре. В якорную цепь, кроме пускового резистора  , включен резистор противовключения
, включен резистор противовключения  для ограничения тока. Пуск двигателя осуществляется в одну ступень (резистор ) с использованием реле времени КТ. Управление осуществляется нажатием кнопок SB1 (пуск), SBL (торможение).
для ограничения тока. Пуск двигателя осуществляется в одну ступень (резистор ) с использованием реле времени КТ. Управление осуществляется нажатием кнопок SB1 (пуск), SBL (торможение).
Date: 2015-08-06; view: 672; Нарушение авторских прав