Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Электропривод по системе генератор-двигатель
|
|
Регулирование скорости данным способом осуществляется по схеме, изображенной на рис. 2.10, когда якорь питается от управляемого источника постоянного тока (преобразователь II) по системе преобразователь-двигатель (П-Д). В качестве преобразователя используются электромашинные (система генератор-двигатель, (Г-Д), управляемые выпрямители (УВ) и широтно-импульсные преобразователи (ШИП).
При этом обмотка возбуждения двигателя независимого возбуждения питается от отдельного источника постоянного тока, например от неуправляемого выпрямителя.
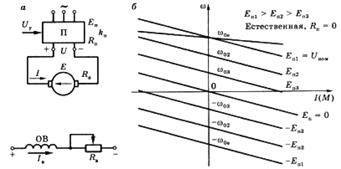
Рис. 2.10. Регулирование скорости ДПТ независимого
возбуждения изменением подводимого к якорю напряжения:
а – схема включения; б – характеристики
Сам преобразователь, в общем случае, характеризуется ЭДС  , внутренним сопротивлением
, внутренним сопротивлением  , коэффициентом усиления
, коэффициентом усиления
 ,
,
где Uy – входной управляющий сигнал.
Напряжение на выходе преобразователя по внешней характеристике
 . (2.16)
. (2.16)
Следовательно, формулы (2.3, 2.4) для электромеханической и механической характеристик будут иметь вид
 (2.17)
(2.17)
На рис. 2.11 приведены схемы и механические характеристики двигателей постоянного тока, работающих по системе П-Д. Из рис. 2.10, б видно, что изменением ЭДС  пропорционально изменяется и скорость идеального холостого хода
пропорционально изменяется и скорость идеального холостого хода  на искусственных характеристиках, а сами характеристики имеют меньшую жесткость (больший наклон) из-за наличия сопротивления . Таким образом, перепад скорости
на искусственных характеристиках, а сами характеристики имеют меньшую жесткость (больший наклон) из-за наличия сопротивления . Таким образом, перепад скорости  увеличился. Естественная характеристика получена при
увеличился. Естественная характеристика получена при  , т. е. при питании от источника напряжения. При этом I и II квадранты соответствуют режимам двигателя и генератора при прямом вращении, a III и IV — соответственно, при обратном. При
, т. е. при питании от источника напряжения. При этом I и II квадранты соответствуют режимам двигателя и генератора при прямом вращении, a III и IV — соответственно, при обратном. При  ДПТ работает в режиме динамического торможения.
ДПТ работает в режиме динамического торможения.
Приведенные на рис. 2.10, б, характеристики соответствуют использованию схемы Г-Д (рис. 2.11). Генератор постоянного тока приводится во вращение асинхронным двигателем  , а напряжение на якоре ДПТ регулируется изменением тока возбуждения генератора
, а напряжение на якоре ДПТ регулируется изменением тока возбуждения генератора  . Якорь генератора (сопротивления обмотки
. Якорь генератора (сопротивления обмотки  ) непосредственно электрически соединяется с якорем двигателя (электрический вал). Регулирование скорости изменением ЭДС
) непосредственно электрически соединяется с якорем двигателя (электрический вал). Регулирование скорости изменением ЭДС  может сочетаться с ослаблением поля двигателя, что обеспечивает двухзонное регулирование: от нуля до номинальной – изменением , выше номинальной – изменением тока возбуждения
может сочетаться с ослаблением поля двигателя, что обеспечивает двухзонное регулирование: от нуля до номинальной – изменением , выше номинальной – изменением тока возбуждения  .
.
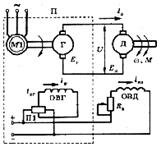
Рис. 2.11. Схема электропривода по системе генератор-двигатель
Основные достоинства системы генератор-двигатель (Г-Д): большой диапазон и плавность регулирования скорости Д1 IT, высокая жесткость характеристик, реализация всех энергетических режимов работы ДПТ.
Основной недостаток – утроенная установленная мощность электрических машин, следовательно, снижение КПД, инерционность регулирования и высокая стоимость.
Подобная схема используется в качестве электротрансмиссии на тепловозах, судах, большегрузных самосвалах и других, где в качестве источника механической энергии применяются тепловые двигатели – дизели, паровые или газовые турбины. Генераторы постоянного тока уступили место синхронным генераторам, работающим через неуправляемый выпрямитель на двигатели постоянного тока.
Date: 2015-08-06; view: 1591; Нарушение авторских прав