Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Базовый выбор первоначальной цели
|
|
В первую очередь всем роботам команды необходимо сделать первоначальный выбор, чтобы затем иметь возможность оценить эффективность такого выбора относительно другого.
Выбор цели каждым роботом, осуществляется с помощью специальной матрицы выбора (Рис. 32):

| X00 | X01 | ... | X0n |
| X10 | X11 | ... | X1n |
| ... | .. | ... | ... |
| Xm0 | Xm1 | ... | Xmn |
Рис. 32.Алгоритм выбора первоначальной цели и матрица выбора
Матрица выбора представляет собой квадратную матрицу, размером NxN, где N – общее количество роботов, Xmn время достижения роботом m робота n. При этом Xmn:

где, Smn -расстояние от робота m до робота n, ANGmn — угол между направлением робота m и роботом n, Sbn — расстояние до края полигона робота n, V — скорость роботов, VA — скорость поворота.
Каждый робот m находит минимальное значение Xmn min и считает его наиболее оптимальным.
Таким образом, приоритетность цели определяется суммой времени
 ,
,
необходимым роботу для ее достижения и
 ,
,
необходимым для достижения роботом края полигона.
Результат моделирования такого алгоритма представлен на Рис. 33:

Рис. 33.Первоначальный выбор цели
Как видно на рисунке, каждый виртуальный робот выбрал наиболее близкую к себе цель. Недостатком такого выбора, является то, что множество роботов стараются атаковать одну и ту же цель. В последствии, это приводит к тому, что роботы начинают мешать друг другу (Рис. 34):
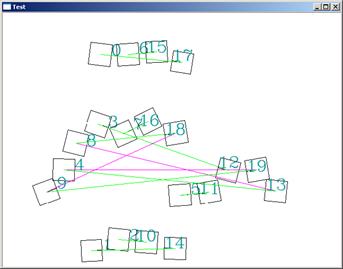
Рис. 34.Патовая ситуация, в случае продолжения выполнения сценария
Роботы не могут дальше продолжать движение, так как им мешают роботы-союзники. Если роботы будут стараться объезжать препятствие, ориентируясь на ИК-дальномер, время Xmn — перестанет отражать реальное время достижения цели, и, как следствие, его вычисление в таком случае не требуется, что ставит под сомнение идею планирования.
Чтобы избежать такой ситуации, необходимо:
1. Ограничить число роботов, которые атакуют одну и ту же цель приемлемым числом (например 1), чтобы избежать сильной концентрации роботов на малой площади.
2. Учитывать время ожидания/объезда препятствия, находящегося на траектории движения.
3. Учитывать время ожидания/объезда препятствия, которое может появится на траектории движения.
4. Использовать возможность переоценивать приоритетность цели через каждый определенный момент t. (Учитывать динамику среды)
Date: 2015-11-14; view: 526; Нарушение авторских прав