Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Основные теоретические положения. Для промышленных систем можно выделить ряд типовых ЛАХ, для которых осуществлено нормирование относительно сопрягающих частот
|
|
.  Для промышленных систем можно выделить ряд типовых ЛАХ, для которых осуществлено нормирование относительно сопрягающих частот. Системе, имеющей определенный вид ЛАХ, соответствуют определенные динамические свойства. При коррекции систем типовая ЛАХ выбирается как желаемая и элементы системы, корректирующие её динамические свойства выбираются таким образом, чтобы скорректированная система имела ЛАХ, совпадающую с желаемой. В данной работе решается задача выбора структуры и параметров корректирующего устройства с целью обеспечения заданных свойств системы. Будем рассматривать три типа ЛАХ, наиболее часто встречающихся в промышленных САУ.
Для промышленных систем можно выделить ряд типовых ЛАХ, для которых осуществлено нормирование относительно сопрягающих частот. Системе, имеющей определенный вид ЛАХ, соответствуют определенные динамические свойства. При коррекции систем типовая ЛАХ выбирается как желаемая и элементы системы, корректирующие её динамические свойства выбираются таким образом, чтобы скорректированная система имела ЛАХ, совпадающую с желаемой. В данной работе решается задача выбора структуры и параметров корректирующего устройства с целью обеспечения заданных свойств системы. Будем рассматривать три типа ЛАХ, наиболее часто встречающихся в промышленных САУ.
Известно, что для ЛАХ типа I (Рис. 14) динамика процесса определяется соотношением частот  и
и  , где
, где  - малая суммарная постоянная времени
- малая суммарная постоянная времени  ,
,  .
.
Если выполняется условие:  (11),
(11),
то переходные процессы в замкнутой системе будут близки к апериодическим с перерегулированием меньше 5%.
Для ЛАХ типа II даже при выполнении условия процесс может быть колебательным. Колебательность процесса зависит от ширины среднечастотной части ЛАХ (участок в районе частоты среза, имеющий наклон -20 дец/дек), то есть чем дальше сопрягающая частота  от
от  , тем меньше колебательность процесса.
, тем меньше колебательность процесса.
Системы, имеющие ЛАХ типа III, обладают существенным недостатком – они являются статическими и, как следствие, имеют статическую ошибку. Достоинством этого типа систем является то, что в них проще обеспечить малоколебательные, быстропротекающие процессы. С ростом постоянной времени Т1, при условии, что частота среза определяется так же как и для ЛАХ типа I и II, свойства системы приближаются к свойствам системы с ЛАХ типа II.
При возможных структурах объекта управления (рис. 15) и параметрах элементов (табл. 5) требуемый тип ЛАХ возможно обеспечить при помощи П, ПИ (12) и регулятора вида (13,14).
 (12)
(12)
 (13)
(13)
или в общем случае
 (14)
(14)
ПИ – регулятор может быть получен на основе звена (14), при этом а0=β, а1=β*τ, b0=0, b1=τ.
В табл.4 сведены возможные случаи формирования желаемой ЛАХ для объекта вида, представленного на рис. 15. Регулятор вида (14) представлен в табл. 4 как «Полный».
Таблица 4
| Тип ЛАХ | Тип регулятра | Большая постоянная времени | Параметры регулятора | Положение клю- ча К4 | ||||
| а0 | а1 | b0 | b1 | |||||
| I | П | отсутствует | Крег=β | вниз | ||||
| ПИ | Тmax =Т1 | β | βτ | 0 | τ | вверх | ||
| II | ПИ | Тmax=1 | β | 4ТΣ β | 0 | 4ТΣ | вниз | |
| III | П | Тmax=1 | Крег=β*Т1 | вверх | ||||
| Полный | Т1=1 | β | βТ1 | 1 | Тр | вверх | ||
| Полный | отсутствует | β | βτ | 1 | Тр | вверх | ||
Рис. 14 Типовые ЛАХ
Структурная схема системы приведена на рис. 15. Положение ключа К4 «вниз» соответствует регуляторам вида (12,13,14), а вверх соответствует П – регулятору. 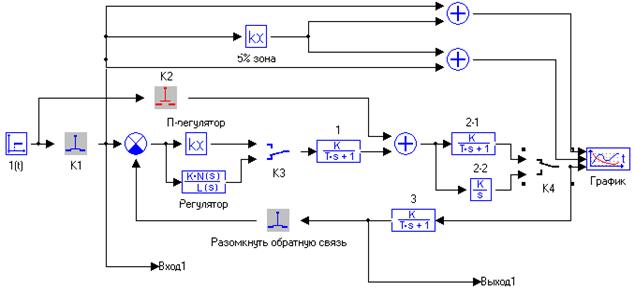
Рис. 15 Структурная схема системы
ЛАХ типа I может быть получена при астатическом объекте и П – регуляторе, статическом объекте и ПИ – регуляторе. Условие (11) в этом случае может быть выполнено, если параметр β найден из соотношения:
 (15)
(15)
При этом в случае астатического объекта Тmax следует принять равным единице.
ЛАХ типа II может быть получена при помощи ПИ - регулятора при астатическом объекте. Коэффициент передачи определяется согласно (15) Тmax следует принять равным единице, минимальная постоянная времени регулятора при настройке промышленных регуляторов для этого случая принимается  . Для рассматриваемого случая
. Для рассматриваемого случая  . При этом участок ЛАХ от частоты до частоты
. При этом участок ЛАХ от частоты до частоты  получается симметричным при
получается симметричным при  . Переходные процессы по управлению получаются колебательными, однако отклонение регулируемой переменной от заданного значения при возмущающем воздействии в этом случае получается наименьшим.
. Переходные процессы по управлению получаются колебательными, однако отклонение регулируемой переменной от заданного значения при возмущающем воздействии в этом случае получается наименьшим.
ЛАХ третьего типа может быть получена при статическом объекте. Для рассматриваемого объекта можно выделить три случая: 1) Т1 – большая постоянная времени, Т2 – малая; 2) Т1 – большая, Т2 – малая и выполняется условие Т2 > Т3; 3) Т1, Т2 – малые.
Предположим, что по тем или иным соображениям (например, необходимо обеспечить статическую ошибку меньше допустимой) требуется обеспечить коэффициент передачи разомкнутой системы Краз ≥ Краз m .
Прежде чем переходить к расчету параметров регулятора, установим продолжительность среднечастотного участка такую же, как для ЛАХ тип II, то есть частоту  . Тогда частота среза
. Тогда частота среза  . То есть среднечастотный участок ЛАХ становится симметричным относительно частоты среза.
. То есть среднечастотный участок ЛАХ становится симметричным относительно частоты среза.
В первом случае, при условии Т1β ≥ Краз m . можно использовать П – регулятор с настройкой Крег=ß Т1. В противном случае необходимо использовать «Полный» регулятор с настройками β согласно (15) при Тmax=1, τ=Т1,  . Постоянная времени в числителе регулятора компенсирует действие Т1, постоянную в знаменателе соответствует точке изменения наклона ЛАХ с 0 дец/дек на – 20дец/дек.
. Постоянная времени в числителе регулятора компенсирует действие Т1, постоянную в знаменателе соответствует точке изменения наклона ЛАХ с 0 дец/дек на – 20дец/дек.
Для случая 3 суммарная малая постоянная равна Т1 + Т2+ Т3. параметр ß рассчитывается при Тmax=1,. , τ либо принять равным нулю либо наибольшей среди малых постоянных времени.
Для ЛАХ типа 3 параметры регулятора уточняются, например, на основе результатов моделирования. Дополнительными исходными данными могут быть: время переходного процесса, перерегулирование, величина статической ошибки и др.
Date: 2015-11-14; view: 490; Нарушение авторских прав