Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Одноканальные канонические системы
|
|
«Канонические» - типовые, типичные.
Уравнение канонических систем имеет вид

В (12.1) u, y ∈ R 1, Х – вектор состояний, который состоит из n производных выходной переменной у.
Особенность нелинейных объектов управления в том, что нелинейная характеристика f (t,X,u) никогда не известна точно. Явная зависимость нелинейной характеристики от времени обусловлена действием различных возмущений.
В отличие от линейных систем, для нелинейных систем требования к динамике и статике задаются не тремя параметрами (точность, быстродействие, демпфирование), а с помощью эталонного уравнения

где F – линейная функция.
Задача управления состоит в том, чтобы поведение объекта (12.1) соответствовало эталонному уравнению (12.2). Иначе говоря, необходимо подобрать такой закон управления u, чтобы выполнялось следующее равенство

Для того чтобы изобрести алгоритм управления, подробно рассмотрим свойства объекта.
В технических системах численные значения функции f (∙) всегда ограничены. Предполагается, что характеристика изменения функции f (∙) с течением времени меняется в рабочих пределах.
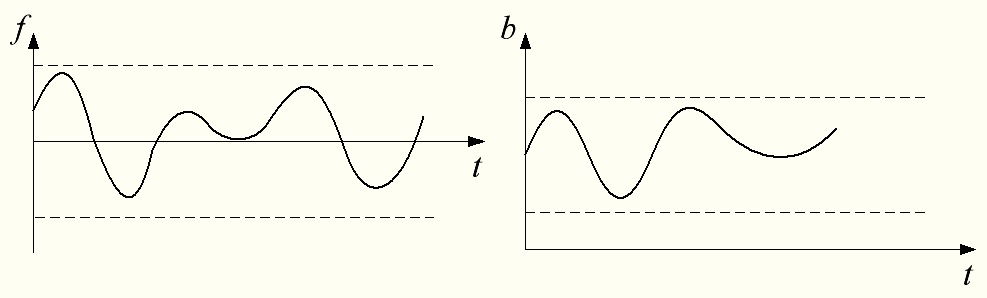
Рис. 12.1 Характер допустимых изменений значений нелинейной функции f (∙)
Следует отметить, что, так как функция f (∙) монотонно положительная, то  с течением времени меняется положительной рабочей области.
с течением времени меняется положительной рабочей области.
Структурная схема, соответствующая уравнения (12.1) с ООС и коэффициентом k показана на рис. 12.2. Закон управления в такой системе формируется в виде  .
.
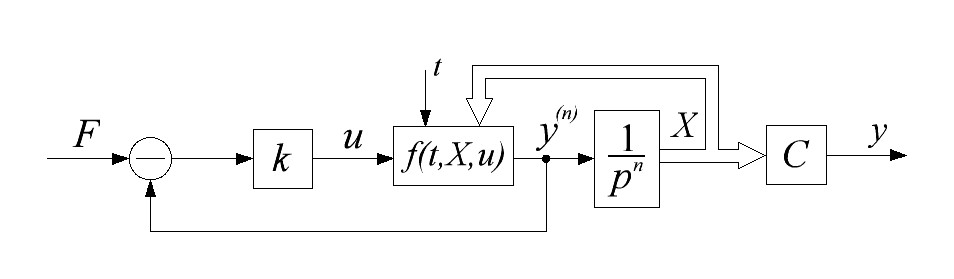
Рис. 12.2 Структурная схема системы
С помощью ООС по  и коэффициента k подавляются все нелинейности и нестационарности, действующие на объект.
и коэффициента k подавляются все нелинейности и нестационарности, действующие на объект.

Рис. 12.3 Система со старшей производной в управлении
Контур 1 является безынерционным. В нем парируются все нелинейности и нестацонарности, и система получается инвариантной по отношению к возмущениям и нестационарностям. Блок С представляет собой матрица – строку и из всех координат состояния выделяет только выходную перемену у.
Недостаток:
1) Высокая чувствительность по отношению к помехам и большим значениям коэффициента k.
Пример: рассмотрим объект с аддитивным управлением 

Закон управления имеет вид

Эталонное уравнение имеет вид (12.2).
Предположим, что можно вычислить точное управление  .
.
1) Подставим изобретенный закон управления в уравнение объекта:


При k →∞ правая часть выражения (12.6) стремится к F. Таким образом,  , что соответствует эталонному уравнению.
, что соответствует эталонному уравнению.
2) Рассмотрим, к чему стремится управление u. Для этого в (12.5) подставим уравнение объекта (12.4).

При k →∞ правая часть выражения (12.7) стремится к  . Таким образом, в пределе алгоритм управления дает точное значение управления
. Таким образом, в пределе алгоритм управления дает точное значение управления  :
:

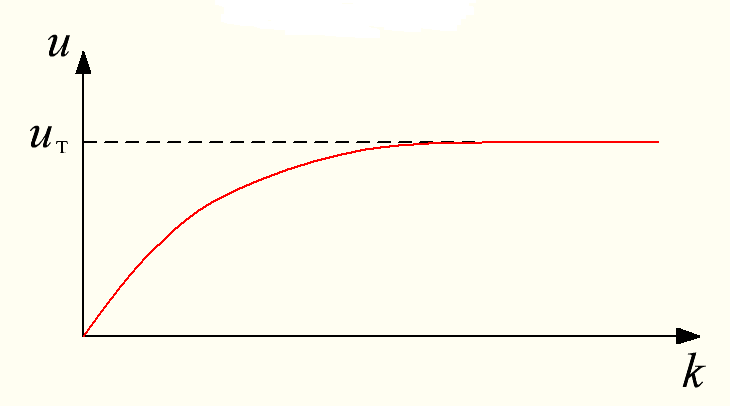
Рис. 12.4 Зависимость управления u от коэффициента усиления k
Из этого следует важное техническое свойство: при бесконечном значении коэффициента k управление u остается конечным в любой момент времени.
3) Рассмотрим действие помехи на управление.
При наличии помехи имеем следующий закон управления:

где  .
.
В (12.8) подставим уравнение объекта (12.4).


При k →∞ правая часть выражения (12.9) стремится к  . Таким образом, в пределе получаем следующее:
. Таким образом, в пределе получаем следующее:
Вклад помехи в управление:  , где
, где  - это управление, вызванное помехой. Опасность наличия помехи состоит в том, что
- это управление, вызванное помехой. Опасность наличия помехи состоит в том, что  по абсолютным значениям может стать больше
по абсолютным значениям может стать больше  . На практике такое происходит уже при двукратном дифференцировании. В таком случае помеха «забьет» тракт и система станет неработоспособной. Поэтому на высоких частотах нужно в полно мере использовать фильтрующие свойства дифференциаторов. Тогда влияние реальных помех измерения можно довести до допустимых значений даже при трехкратном дифференцировании. Технические свойства таких систем объясняются образованием локального контура, в котором подавляются действия нестационарностей.
. На практике такое происходит уже при двукратном дифференцировании. В таком случае помеха «забьет» тракт и система станет неработоспособной. Поэтому на высоких частотах нужно в полно мере использовать фильтрующие свойства дифференциаторов. Тогда влияние реальных помех измерения можно довести до допустимых значений даже при трехкратном дифференцировании. Технические свойства таких систем объясняются образованием локального контура, в котором подавляются действия нестационарностей.
Date: 2015-07-27; view: 421; Нарушение авторских прав