Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Способ отрицательной обратной связи для нелинейного объекта
|
|
Рассмотрим схему с нелинейным объектом управления. В качестве регулятора используется П – регулятор. Для простоты будем полагать, что возмущений и помех нет.
| ∆ |
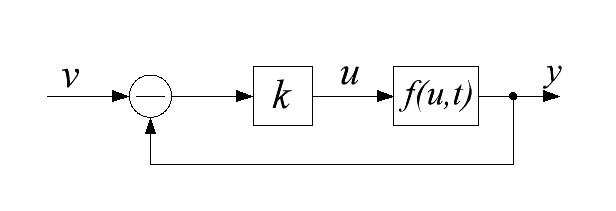
Рис. 11.1 Схема с ООС, нелинейным объектом управления и П - регулятором
Здесь f (u,t) – нелинейность.
Явная зависимость нелинейности от времени отражает действие параметрических и сигнальных возмущений.
Проанализируем, хорошо ли справляются коэффициент усиления и ООС. Для этого предположим, что в рабочей области функция f (u,t)монотонна (первая производная одного знака). Пусть  . Теперь докажем, что ошибка
. Теперь докажем, что ошибка  стремится к нулю при k →∞, если f (u,t) - монотонно положительная. Чтобы доказать это свойство, рассмотрим производную от ошибки по коэффициенту k. Если эта производная меньше нуля (отрицательная), то ошибка
стремится к нулю при k →∞, если f (u,t) - монотонно положительная. Чтобы доказать это свойство, рассмотрим производную от ошибки по коэффициенту k. Если эта производная меньше нуля (отрицательная), то ошибка  стремится к нулю при k →∞.
стремится к нулю при k →∞.

где , u = k ∆.
В итоге получаем дифференциальное уравнение для ошибки регулирования:

Так как f (u,t) - монотонно положительная функция, следовательно,  . Тогда из уравнения (11.1) имеем, что
. Тогда из уравнения (11.1) имеем, что  при любом значении b и при k →∞.
при любом значении b и при k →∞.
Вывод: при любом начальном значении ошибка ∆ будет стремиться к нулю.
Теперь преобразуем систему (11.1): в качестве регулятора используем интегратор.
| ∆ |
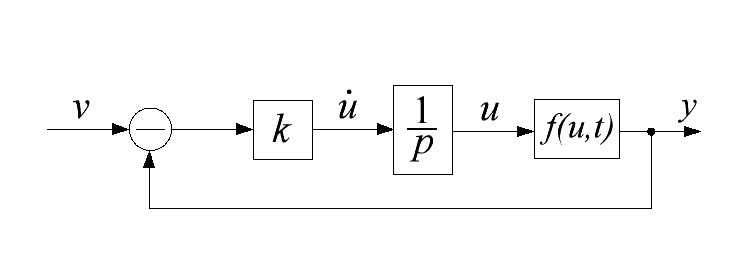
Рис. 11.2 Схема с ООС, нелинейным объектом управления и И – регулятором
Составим дифференциальное уравнение относительно ошибки регулирования. Так как , тогда

Дифференциальное уравнение для ошибки имеет вид

где b >0, k >0. Таким образом, при любом значении k система на рис. 11.2 устойчива по ∆, следовательно, ∆  0.
0.
Вывод: интегратор так же как и коэффициент k (П - регулятор) делает ошибку ∆ нулевой, но вводит в систему инерционность (динамическое запаздывание). То есть интегратор снижает быстродействие.
Date: 2015-07-27; view: 455; Нарушение авторских прав