Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Оборудование для маневрирования конусами
|
|
Оборудование для маневрирования должно обеспечить надежное прижатие конусов к чашам и прямолинейное движение штанг. Обычно применяются схемы с конусами, которые подвешены к установленным на колошнике балансирам, и канатным приводом, расположенным в здании скиповой лебедки. Бесканатный привод размещают на колошнике и соединяют с балансиром. Применяют и безбалансирные схемы, вкоторых пневматический, гидравлический или электрический привод непосредственно связан со штангой конуса.
По характеру взаимодействия привода и штанги механизмы бывают со свободным и принудительным опусканием конусов.
Применяемые приводы конусов можно разделить на два основных типа: со свободным и с так называемым принудительным опусканием конусов. Отличительной особенностью первого из них является отсутствие непосредственного воздействия привода на конус при его опускании; последнее происходит под действием собственного веса конуса и веса лежащей на нем шихты. Подъем конуса осуществляется принудительно электролебедкой или пневматическим цилиндром (рис. 82), имеющими гибкую связь с его штангой через рычажный балансир.
Приводы, относящиеся ко второму типу (рис. 83), выполняют балансирными или безбалансирными. Балансирные приводы могут быть канатными (от электролебедки) и бесканатными.
Канатные приводы, в свою очередь, делятся на рычажные (см. рис. 82, 83) и шкивные. Известны бесканатные балансирные приводы: электромеханический с кривошипно-шатунным механизмом и гидравлический, а безбалансирные —гидравлические и электромеханические винтовой, реечный, кривошипно-шатунный.

Рис. 82. Схема привода конусов загрузочного устройства. Свободное опускание конусов:1 —большой конус; 2 — чаша; 3 — штанга большого конуса; 4 — цепь; 5 — балансир; 6 — канат; 7 — блок канатный; 8 — пневматический цилиндр:
В отечественной практике преимущественное применение получил рычажно-балансирный электромеханический привод конусов с принудительным их опусканием, схематически изображенный на рис. 83. Конус 6, закрывающий чашу 7, на штанге 5 подвешен к прямильному механизму 4 балансира 1, установленного на оси О1(балансир имеет три плеча: противовеса, — каната лебедки, О1С—прямильного механизма).
При вращении барабана 10лебедки наматывается цепь 9,натягивается канат 2, огибающий блок 8, поворачивается балансир 1 и принудительно опускается конус. При вращении лебедки в обратном направлении ослабляется канат 2 и за счет силы тяжестипротивовеса на плече балансира конус поднимается и закрывает чашу.
В лемнискатном прямильном механизме О1СС1О2 (рис. 83) точка М, расположенная посередине звена (шатуна) О1С при повороте кривошипа ОС радиусом rна определенном участке траектории движется по кривой, весьма близкой к прямой вертикальной линии. В точке М шарнирно подвешивают тяги конусов. Размеры прямильных механизмов для большого и малого конусов в целях унификации принимают одинаковыми. Ход малого конуса, как видно из рисунка, практически равен длине всею участка движения точки М по траектории, приближающейся к вертикальной прямой. Ход же большого конуса меньше и располагается внутри этого участка. Поэтому погрешность в установке рычага балансира малого конуса может повлечь за собой более значительное отклонение положения точки М по горизонтали, чем большого конуса. Анализом лемнискатного механизма установлено, что принимаемые его геометрические параметры обеспечивают незначительное (~2 мм) горизонтальное отклонение точки М от оси печи (ось у).
Эта схема, принятая в качестве типовой, сравнительно проста и компактна, но недостатком ее является наличие канатов, замена и регулирование которых требуют остановки печи. Обрыв канатов при маневрировании приводит к ударам конуса о чашу, что может вызвать разрушение штанги и других элементов загрузочного устройства.

|
Рис. 83. Прямильный механизм лемнискатного типа
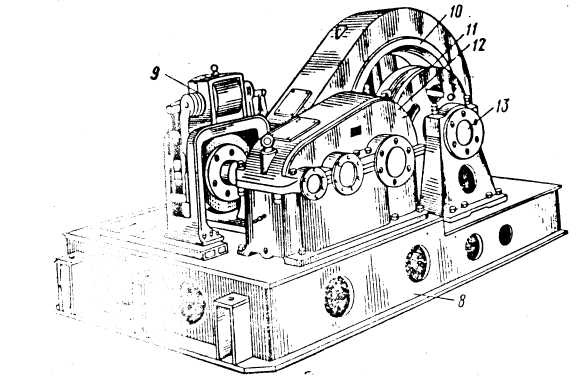
Лебедка управления конусами (рис. 84) предназначена для попеременного подъема и опускания большого и малого конусов при загрузке шихтовых материалов в доменную печь. Основные части и механизмы лебедки управления конусами—жесткая сварная рама 8 и грузовой вал 13 с двумя свободно насаженными стальными литыми барабанами 11. Между ними на этом же валу насажено и закреплено шпонкой зубчатое колесо, связанное с редуктором 12, тормозная муфта 9, предохранительное устройство и электрооборудование.
|
Рис.84. Лебедка управления конусами 8 — рама, 9 — тормозная муфта, 10 — пара косозубых шестерен с кожухом, 11 — стальной барабан, 12 — редуктор, 13 — грузовой вал;

Рис. 85. Кинематическая схема лебедок управления конусами:
Лебедка управления конусами (рис. 85, а) состоит из электродвигателя постоянного тока 1, муфты 2 с тормозом 3, двухступенчатого цилиндрического редуктора 4, на выходном валу которого установлена шестерня 5, находящаяся в зацеплении с колесом 6. Зубчатое колесо 6 закреплено на грузовом валу 7, опирающемся на подшипники 8. По обе стороны колеса 6 на валу 7 на подшипниках скольжения посажены барабаны 9 и 13. Барабаны имеют приливы-кулаки 10, которые могут входить в контакт с приливами-кулаками 11 на колесе 6. При вращении колеса 6 один из его кулаков 11 упирается в кулак 10 соответствующего барабана 9 или 13, вращает его на угол примерно 300° (другой барабан при этом неподвижен) и за счет наматывания на него цепи тянет канат, поворачивает балансир и открывает соответствующий конус. При вращении колеса 6 в противоположном направлении кулак колеса 11 отходит от кулака барабана 10, и барабан вращается под действием натяжения каната, идущего к балансиру, за счет момента, создаваемого противовесом балансира. Лебедка имеет два командоаппарата 14, которые связаны с валом 7 кинематическими редукторами 12.Два конечных выключателя 15 обеспечивают остановку лебедки при переходе за предельный угол поворота (320°) в случае несрабатывания командоаппаратов.
На печах большого объема (2700—3200 м3) устанавливают лебедки с двумя одинаковыми одновременно работающими приводами (рис.85, б). Каждый привод состоит из электродвигателя 1, муфты 2 с тормозом 3, цилиндро-конического редуктора 4, зубчатой муфты 5, вала-шестерни 6 и зубчатого ко леса 7, на валу которого свободно установлены два барабана 8 для цепей большого и малого конусов. Вращение от колеса 7 к барабанам 8 передается кулаками.
Лебедка имеет два командоаппарата 9 и два конечных выключателя 10.
Date: 2015-10-21; view: 2380; Нарушение авторских прав