Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
ЭЛЕКТРОСТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ 8 page
|
|
а) Б)
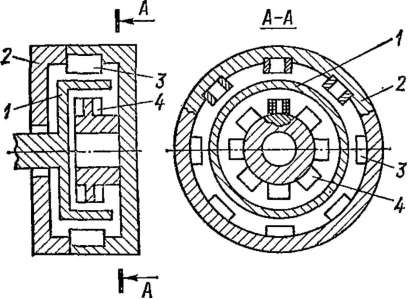 Рис. 8-56
Рис. 8-56
|
| X |
| JL |
| + |
Ш Г1 п
а
кладная измерительная катушка, распределение магнитного потока в ферромагнитном роторе и импульс ЭДС в катушке. Амплитуда импульса может быть оценена как е = —ьуДФ/т, где w — число витков обмотки; ДФ — приращение магнитного потока, вызванное скачком Баркгаузена; т — длительность скачка. Измерительные катушки располагаются в области максимального градиента магнитного поля и соединяются последовательно, при этом дисперсия выходного сигнала увеличивается в п раз, где п — число установленных систем. а) 1 2 3
Тахометр позволяет измерять угловые скорости в диапазоне 10~3--10~* рад/с (10~2—1 об/мин) с погрешностью не более 1%. При более высоких скоростях происходит захват доменов, т. е. увеличение размера естественной метки, и уменьшение чувствительности преобразователя.
| Рнс. 8-57 |
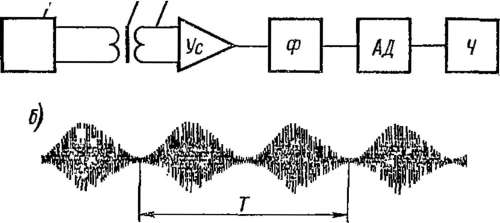
Принцип действия преобразователя с ферромагнетиком, перемагничиваемым переменным магнитным полем, показан на рис. 8-57, а. Устройство 1 служит для создания циклически меняющегося во времени магнитного потока, перемагничиваю- щего неподвижный ферромагнетик 2. В измерительной обмотке 3 наводятся импульсы ЭДС, для измерения информативных параметров которых используются те же узлы, что и в схеме, показанной на рис. 8-55, а. Характер ЭДС, наводимой в обмотке Зу показан на рис. 8-57, б. При циклическом прохождении петли гистерезиса наибольшее число скачков приходится на крутую часть гистерезисной петли, на по
лого"? паста они практически отсутствуют. Этим определяется периодически нестационарный характер магнитного шума и индуктируемой им ЭДС. Так же как в случае стационарного процесса, математическое ожидание периодически нестационарного'случайного процесса (ПНСП) постоянно и равно нулю, средняя за период пере- магничивания Т частота выбросов, превышающих заданный уровень, а также усредненная за период и текущая дисперсия являются информативными параметрами при измерении характеристик внешнего магнитного поля, а также при измерении тока и напряжения, определяющих напряженность поля.
При постоянстве функции, описывающей изменение магнитного поля в течение цикла, параметр магнитного шума зависит от объема образца и структурных свойств ферромагнетика, и эффект Баркгаузена может быть положен в основу преобразователя неразрушающего контроля для измерения толщины гальванических покрытий и содержания в них ферромагнетика.
Конструктивно преобразователь представляет собой соленоид, длина которого для обеспечения равномерности магнитного поля в 5—10 раз превышает средний диаметр. В центре соленоида помещается измерительная обмотка, в которую вводится исследуемый образец.
Мощность магнитного шума в преобразователе зависит от числа доменных областей, участвующих в перемагничивании образца при постоянном режиме пере- магничивания. Число доменных областей определяется как толщиной покрытия, так и содержанием ферромагнетика в нем. Влияние толщины выражается в изменении дисперсии случайного процесса без изменения вида ПНСП. Изменение состава гальванического покрытия приводит к изменению вида петли гистерезиса (при уменьшении содержания ферромагнетика петля становится уже и прямоугольнее) и, следовательно, характера ПНСП.
Можно выбрать такое сочетание режима перемагничивания образца и регистрации информативных параметров, при котором разделяется информация о толщине покрытия и о содержании в нем ферромагнетика.
ГЛАВА ДЕВЯТАЯ
ГАЛЬВАНОМАГНИТНЫЕ ПРЕОБРАЗОВАТЕЛИ
9-1. ПРЕОБРАЗОВАТЕЛИ ХОЛЛА
Гальваномагнитные преобразователи (ГМП) основаны на физических эффектах, возникающих в находящихся в магнитном поле твердых телах при движении в них заряженных частиц. В качестве измерительных преобразователей практическое применение получили главным образом полупроводниковые ГМП, основанные на использовании эффектов Холла и Гаусса. Эффект Холла заключается в возникновении поперечной разности потенциалов (ЭДС Холла) на боковых гранях пластины, а эффект Гаусса, или магниторезистивный эффект, проявляется в изменении электрического сопротивления пластаны. Оба эффекта обусловлены изменением траектории движения заряженных частиц в магнитном поле, возникают одновременно и связаны между собой так, что каждый из них приводит к ослаблению другого. Выбирая определенным образом конструкцию и состав материала преобразователя, можно усилить один из эффектов и ослабить другой, Создавая таким образом преобразователи Холла, или магниторезистивные преобразователи.
Преобразователь Холла представляет собой четырехполюсник, обычно выполняемый в виде тонкой пластинки или пленки из полупроводникового материала. Токовые электроды / и 2 (рис. 9-1) выполняются по всей ширине поперечных граней, что обеспечивает равномерное распределение входного тока по сечению преобразователя. Потенциальные (Холловые) электроды 3 и 4 расположены в центральной части продольных граней.
В магнитном поле носители заряда под действием сил Лоренца F = evB изменяют свою траекторию, вследствие чего на одной из боковых граней концентрация зарядов одного знака увеличивается, в то время как на противоположной грани — уменьшается. Возникающая при этом разность потенциалов (ЭДС Холла) определяется выражением
^ХЛ == ДхлФ (Кгеош 6) IB cos a/d, (9-1)
где RXJl — постоянная Холла, зависящая от свойств материала преобразователя; ф (^геом» е) — функция, зависящая от геометрии преобразователя и так называемого угла Холла 6 между векторами плотности тока и напряженности вызывающего его электрического поля, определяемого подвижностью № носителей зарядов и значением магнитной индукции (при l/b = 2 и аЦ ^ 0,1 функция ф 1); а — угол между вектором магнитной индукции и магнитной осью преобразователя, совпадающей в первом приближении с нормалью к плоскости преобразователя.
^ Особенно сильно эффект Холла проявляется в германии (Ge), кремнии (Si) и в полупроводниках, состоящих из элементов III и V групп периодической системы. Постоянные Холла для полупроводниковых материалов имеют порядок 10 2—10 4м3/(А-с|, в то время как для чистых металлов, например для меди, Rxn = 6-10 11 м3/(А-с).
Кристаллические преобразователи Холла выполняются в виде тонких пластинок (d = 0,01 ~ 0,2 мм), которые вырезаются из монокристаллов и шлифовкой доводятся до необходимой толщины. Выводы укрепляются на боковых гранях путем
пайки или сварки. Пластинки наклеиваются на подложки из радиотехнической слюды, ультрафарфора или си- талла.
Хорошими метрологическими характеристиками отличаются пленочные преобразователи Холла из тонких поли кристаллических пленок InAs и InSb на стеклянных подложках и преобразователи на основе гетероэпитак- сиальных структур InSb и GaAs на подложках из полуизолирующего арсенида галлия. Чувствительный элемент преобразователя выполняется в виде тонкой пленки (5—10 мкм) способом фотолитографии. Такие преобразователи можно выполнять сложной формы с малой площадью чувствительной зоны (0,2 X 0,05 мм и менее). На рис. 9-2 показано устройство серийно выпускаемых преобразователей Холла типа ПХЭ, где 7 и 2 — токовые, а 3 и 4 — потенциальные выводы.
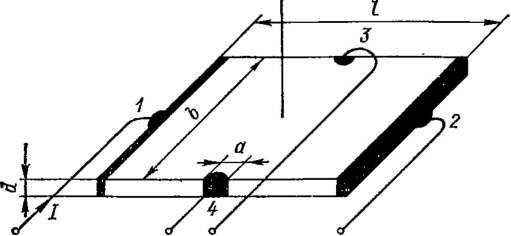 Рис. 9-1
Рис. 9-1
|
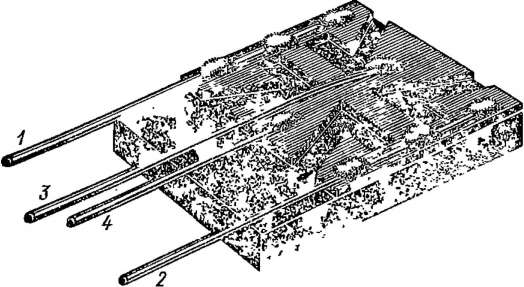 Рис. 9-2
Рис. 9-2
|
Выходная величина преобразователя Холла, как видно из выражения (9-1), пропорциональна произведению двух входных величин — тока и магнитной индукции. Таким образом, преобразователь Холла является множительным преобразователем. При постоянных во времени I я В ЭДС Холла является постоянной величиной. Если одна из. входных величин (В или /) постоянная, а другая — переменная, то ЭДС Холла будет переменной величиной той же частоты, что и частота входной
величины. В случае если обе входные величины имеют одну и ту же частоту и сдвинуты по фазе на угол ф, ЭДС Холла будет состоять из постоянной и переменной двойной частоты составляющих:
Ехл BI cos<p+^p BI cos (2сог+<р).
Если ток изменяется с частотой сог, а магнитная индукция — с частотой со2, то ЭДС Холла содержит две составляющие, одна из которых имеет частоту gjj — со2, а другая сох + <оа.
Входное сопротивление RBX преобразователя Холла определяется как сопротивление между токовыми электродами, а выходное сопротивление /?вых равно сопротивлению между Холловыми электродами. У серийно выпускаемых преобразователей Холла RKX и RBhlx близки по значению и лежат в пределах от 0,5 Ом до нескольких килоом. Вследствие магниторезистивного эффекта RBX и RBЬ1Х увеличиваются с ростом магнитной индукции.
Гальваномагнитная чувствительность преобразователя Холла при а = 0 определяется выражением
Sbi- e «JI b ')-R uФ(Кгеом, V)/d
и для различных типов преобразователей составляет 0,3—10 В/(А«Тл).
Чувствительность к магнитной индукции SB определяется при номинальном значении входного тока /нон — const как SB ~ RxJKOMу/d и для серийно выпускаемых преобразователен составляет 0,03—I В/Т л. Значение тока / ном ограничено допустимой температурой перегрева преобразователя. Для высокоомных преобразователей допустимые- значения токов составляют 5—50 мА, для низкоомных 100— 200 мА. Гальваномагнитная чувствительность SBI и чувствительность к магнитной индукции SJ3 зависят от магнитной индукции В, так как R = fi (В) и ф = /2 (5). Эти зависимости главным образом определяют нелинейность характеристик преобразователей Холла в сильных полях.
Чувствительность к. току Sf определяется при постоянном значении магнитной индукции В = const как Sj — RxjBq>/d. При индукции В = I Тл чувствительность к току для различных типов преобразователей составляет 0,3—50 В/А.
Характеристики серийно выпускаемых преобразователей Холла - приведены в табл. 9-1 и 9-2. Лучшими метрологическими характеристиками обладают преобразователи Холла типа ПХЭ на основе гетероэпитаксиальных структур антимонида индия, которые в зависимости от метрологических характеристик разделяются на классы А, Б и В. Некоторые разновидности этих преобразователей характеризуются очень малым температурным коэффициентом чувствительности (5-г 10) 10"^ К-1, малым остаточным напряжением (10—70 мкВ), малой погрешностью линейности при магнитных индукциях до 15 Тл и широким диапазоном рабочих температур (от —271,5 до +100 °С). Для работы при повышенных температурах (до 127—327 °С) наиболее пригодны преобразователи Холла из арсенида галлия, которые имеют относительно малые температурные коэффициенты постоянной- Холла и удельные сопротивления.
Остаточным напряоюением преобразователя Холла называется напряжение, которое возникает между Холловыми электродами при прохождении через преобразователь тока в отсутствии магнитного поля. Причиной остаточного напряжения в первую очередь является расположение Холловых электродов в неэквипотенциаль- пых точках пластины.
При наличии температурного градиента между Холловыми контактами, каждый из которых является соединением медного вывода с полупроводниковым материалом, в цепи возникает термо-ЭДС. При разности температур между контактами 0,1 °С возникает термо-ЭДС еТ = 10 -ь 100 мкВ. Для уменьшения градиента температур преобразователь следует укреплять на подложке из материала с хорошей теплопроводностью. Суммарное остаточное напряжение может составлять от единиц микровольт до десятков милливольт. У серийно выпускаемых преобразователей значения UOCT/I лежат в пределах Ю"с—0,4 Ом.
Схемы коррекции остаточного напряжения приведены на рис. 9-3, а, б. Сопротивления резисторов Ri и R2 должны быть на два порядка больше входного сопро-
Таблица 9-1
|
| Чувствительность при токе 100 мА, В/Тл | Остаточное напряжение, мкВ | Температур коэффици чувствительности. | ||||||
| Тип преобразователя | Класс преобраз-ова | |||||||
| А | Б | в | А | Б | в | А | Б | |
| ПХЭ 602 117 | 0,5 | 0,3 | 0,2 | 2:0,002 | ±0,001 | |||
| ПХЭ 602 817 ПХЭ 605 817 ПХЭ 606 817 | ОД | 0,08 | 0,06 | 30 30 50 | 20 20 30 | 10 10 t 20 | ±0,0003 | ±0,0002 |
| ПХЭ 602 118 ПХЭ 605 118 | 0,075 | 0,05 | 0,03 | ±0,0002 | ±0,0001 | |||
| ПХЭ 603 118 ПХЭ 606 118 | 75 30 | 50 20 |
тивления преобразователя. Коррекцию остаточного напряжения также можно осуществить при совместном использовании преобразователя Холла и операционного усилителя с дифференциальным входом (рис. 9-4). Особенно пригодны для этой цели операционные усилители типа. К551УД1, которые имеют малый температурный дрейф (менее I мкВ/К) и независимую цепь коррекции выходного смещения, при помощи которой осуществляется компенсация остаточного напряжения.
Погрешность нуля, обусловленная дрейфом остаточного напряжения, является одной из наиболее трудно устраняемых составляющих погрешности преобразователей Холла. Дрейф главным образом связан с колебаниями температуры преобразователя и наличием градиента температур между его электродами. Одной из причин возникновения градиента температур является эффект Пельтье (см. § 13-2), который имеет место при питании преобразователя постоянным током.
Погрешность нуля является основной характеристикой, определяющей применимость преобразователей Холла для измерения слабых магнитных полей.
Погрешность линейности у различных типов преобразователей при изменении магнитной индукции от 0 до 10 Тл составляет 1—10%. Хорошей линейностью характеристик отличают-.ся преобразователи Холла из антимонида индия, у которых погрешность линейности составляет 0,1—1% в диапазоне в — 0 -f- 2 Тл и 1% при в = 0,1 -f- 10 Тл. Малую погрешность линейности (0,2%) при магнитной индукции до I Тл имеют преобразователи из арсенида-фосфида индия (InAsP).
| S) |
| «> 3 ih4 |
| \— | |||
| 1 х | |||
| r2 | *< |
| н |
| Рис. 9-3 |
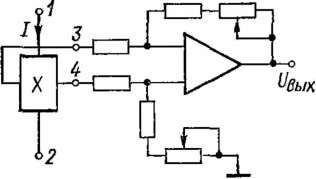 Рис. 9-4
Рис. 9-4
|
Погрешность от собственного магнитного поля преобразователя. При прохождении через преобразователь тока возникает магнитное поле. Если это поле асим-
Таблица 9-2
|
метрично, то интегральное по площади пластины значение индукции не будет равна нулю, а составит некоторую величину Вас. Асимметрия поля может иметь место, если обратный провод токового вывода расположен вблизи преобразователя и асимметрично по отношению к нему (рис. 9-5, а). Возникающая в результате взаимодействия индукции Вас и тока / дополнительная ЭДС Холла пропорциональна квадрату тока /. Правильное расположение выводов показано на рис. 9-5, б. Если преобразователь находится на значительном расстоянии от ферромагнитных ^Деталей, то магнитная индукция собственного поля преобразователя обычно не превышает 10"6—КГ4 Тл. При нахождении преобразователя вблизи полюсных наконечников индукция этого поля может достигать 5- 1СГ4—10~3 Тл, что приводит к существенной погрешности. Основной путь уменьшения влияния собственного магнитного поля — правильный монтаж преобразователя.
Погрешность направленности обусловлена зависимостью выходного сигнала
преобразователя Холла от его пространственного расположения по отношению к вектору магнитной индукции. Напряжение Холла имеет максимальное значение, когда вектор магнитной индукции направлен параллельно магнитной оси преобразователя, указывающей направление наибольшей чувствительности. В идеальном случае магнитная ось совпадает с нормалью к плоскости преобразователя [9].
Вопросы стабильности преобразователей Холла еще недостаточно изучены. По имеющимся данным, нестабильность чувствительности у некоторых типов преобразователей составляет 0,1—1% в год. Существенное влияние на стабильность могут оказать механические напряжения, возникающие в процессе изготовления преобразователя и при его монтаже в датчике, а также температурные деформации. Преобразователи без подложки более стабильны, чем наклеенные на подложку.
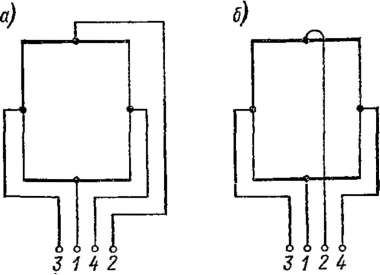 Рис. 9-5
Рис. 9-5
|
Температурная погрешность преобразователей Холла обусловлена зависимостью от температуры постоянной Холла, сопротивления преобразователя и остаточного напряжения. Температурный коэффициент чувствительности у лучших типов
преобразователей составляет (5 -4- 10) 10~5 К"1. Малые значения температурной погрешности характерны для преобразователей на основе гетероэнитаксильных структур InSb тройного соединения InAs0i8P0i2 (yQ ^ 0,0003 К-1), из арсенида галлия (V© ^ 0,0006 К"д в диапазонах температур 20—300 °С), а также для некоторых топов преобразователей из германия (ve 0,0003 КГ*), предназначенных для работы в относительно узком диапазоне температур.
Если температурные коэффициенты постоянной Холла и сопротивления имеют одинаковые знаки и близки по значению, коррекцию температурной погрешности можно осуществить при питании преобразователя от источника стабильного напряжения. Такой режим питания целесообразно применять для преобразователей Холла из антимонида индия. Уменьшение температурной погрешности достигается также при применении схем коррекции с использованием терморезисторов (см. § 11-4). Однако, поскольку напряжение Холла сложным образом зависит от ряда темпера- турно-зависимых параметров, осуществить точную коррекцию температурной погрешности практически невозможно, особенно для широкого диапазона рабочих температур.
Динамические характеристики преобразователей Холла. Время установления ЭДС Холла характеризуется временем релаксации т — е/у, где е — диэлектрическая проницаемость, а у — удельная проводимость материала преобразователя. Для обычно используемых материалов т = 10"11 I0~J3 с, поэтому постоянная Холла частотно-независима при частотах до 10й Гц. Межэлектродные емкости у преобразователей Холла составляют единицы пикофарадов, поэтому их влияние сказывается при частотах порядка десятков и сотен мегагерц.
Динамические свойства непосредственно преобразователя Холла, казалось бы, позволяют использовать его при измерениях индукции в переменных магнитных полях очень высокой частоты. Однако при работе в переменных магнитных полях возникают ограничения несколько иного рода. В переменном магнитном поле в выходной цепи преобразователя появляется дополнительная ЭДС, индуктируемая переменным магнитным полем, еинд = соBmS cos со/, где со — частота; Вт — амплитуда индукции и 5 — площадь контура, пронизываемого магнитным потоком. Индуктируемая ЭДС сдвинута по отношению к ЭДС Холла на 90°. Уменьшение индуктируемых ЭДС осуществляется рациональным расположением выводов преобразователя и включением дополнительных компенсационных обмоток (см. § 3-5). Возможно также питание преобразователя переменным током, частота которого значительно больше частоты переменного магнитного поля, и использование узкополосных усилителей для усиления выходного напряжения. Кроме того, в переменном магнитном поле в пластине преобразователя возникают вихревые токи, магнитное поле которых изменяет основное поле и тем самым ЭДС Холла. Вектор наведенной магнитной индукции сдвинут относительно вектора индукции внешнего поля примерно на 90°, и поэтому изменение ЭДС Холла происходит не только по значению, но и по фазе. Вихревые токи приводят также к дополнительному разогреву преобразователя. При питании преобразователя Холла постоянным током и нахождении его в переменном магнитном поле с частотой до 1,5 МГц и индукцией до 0,5 Тл зависимость ЭДС Холла от частоты имеет вид
Ехл = ]/!+(сое1' <ю< +
где v — электрическая проводимость материала преобразователя; — магнитная проницаемость среды, окружающей преобразователь; <р — arctg щхуЬ2/8 — фазовый сдвиг.
Как видно, характеристика ЭДС Холла сильно зависит от ширины преобразователя Ь. Так, например, при расположении преобразователя Холла толщиной 100 мкм и шириной 6 мм между двумя ферритовыми наконечниками (]и 2000 щ) ЭДС Холла увеличивается в 1,5 раза при изменении частоты магнитного поля от 0 до 1,5 МГц, а сдвиг фазы между ЭДС Холла и магнитной индукцией достигает 57°. При уменьшении ширины преобразователя в два раза (Ь = 3 мм) и неизменных прочих условиях увеличение ЭДС Холла составляет всего 3%.
При питании преобразователей током высокой частоты имеет место поверхностный эффект, который приводит к уменьшению эффективной толщины преобразователя и к увеличению его чувствительности. Для серийно выпускаемых преобразователей поверхностный эффект мало сказывается при частотах до 107 Гц. Для работы гфи более высоких частотах питающего тока необходимо использовать пленочные преобразователи толщиной 5—10 мкм.
Анализ основных метрологических характеристик преобразователей Холла показывает, что основная погрешность большинства приборов, в которых используются преобразователи Холла, составляет 0,5—1,0 % и более. Только при применении сложных методов коррекции можно снизить погрешность измерения до 0,1— 0,2 % при работе в узком диапазоне температур.
Наиболее широкое применение преобразователи Холла получили для измерений параметров постоянных, переменных и импульсных магнитных полей и для определения характеристик ферромагнитных материалов. Кроме этого, они используются для измерений ряда других физических величин, которые легко преобразуются в изменение магнитной индукции (электрические токи, угловые и линейные перемещения и др.) [8].
9-2. МАГНИТОРЕЗИСТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ
Сопротивление проводящего канала при наличии носителей заряда двух знаков определяется выражением
R = l/[Se(nun+puD)],
где е — заряд электрона; п и ип —- соответственно средняя концентрация и подвижность электронов (анионов); р и ир — средняя концентрация и подвижность дырок (катионов); / и S — соответственно длина и сечение проводящего канала.
При воздействии на канал магнитного поля изменяется его электрическое сопротивление вследствие изменения подвижности носителей заряда, их средней концентрации и изменения соотношения размеров проводящего канала. Магниторези- стивный эффект можно наблюдать в чистых металлах, в полупроводниках, а также в электролитах.
К магниторезистивньш преобразователям относятся магниторезисторы, магни- тодиоды, биполярные магнитотранзисторы, гальваномагниторекомбииационные преобразователи и полевые магнитотриоды. В настоящее время для создания средств измерений практическое применение нашли магниторезисторы и гальваномагнито- рекомбинационные преобразователи. Остальные типы магниторезиставных преобразователей, за исключением магнитодиодов, находятся еще в стадии развития. Магнитодиоды применяются главным образом в качестве бесконтактных переменных резисторов.
Магниторезисторы представляют собой гальваномагнитные преобразователи (ГМП), изменение сопротивления которых обусловлено изменением подвижности носителей заряда. Под действием магнитного ноля траектории носителей искривляются, вследствие чего скорость их движения в направлении электрического поля уменьшается. Уравнение' преобразования магниторезистора имеет вид RB= = Я^^оП + А | иВ |т], где и — подвижность носителей заряда; сопро
тивление преобразователя при В = 0; А — магниторезистивньш коэффициент, зависящий от свойств материала и формы преобразователя; т — показатель степени, равный 2 в слабых магнитных полях (В ^ 0,2 0,5 Тл), для которых иВ ^ 1, и равный 1 в сильных магнитных полях, для которых иВ ^ 1.
Как видно из рис. 9-6, а, функция преобразования магниторезисторов является четной, поэтому как в постоянном магнитном поле любой полярности, так и в переменном магнитном поле их сопротивление увеличивается. Максимум приращения сопротивления при данном значении магнитной индукции имеет место, если угол между вектором магнитной индукции и осью направленности магниторезистора равен 0 или 180°.
Первые магниторезисторы выполнялись из висмута (висмутовые спирали). В настоящее время магниторезисторы изготовляются из полупроводниковых материалов группы AInBv — антимонида индия (InSb), арсенида индия (InAs) и др., в' которых сильно проявляется магниторезиставный эффект вследствие большой подвижности носителей заряда.
Магниторезистивный коэффициент А зависит от формы магниторезистора. Чем меньше отношение длины резистора к площади его сечения, тем больше коэффициент Л. В этом отношении оптимальна конструкция в виде диска Корбино (рис.9-6, б),
Date: 2015-09-18; view: 852; Нарушение авторских прав