Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Числа пар полюсов
|
|
Из выражения для угловой скорости асинхронного двигателя
следует, что синхронную скорость АД можно регулировать изменением числа пар полюсов при заданной частоте f1 и незначительно изменяющемся скольжении s. Такое регулирование является ступенчатым, т. к. число пар полюсов может быть только целым. Реализуется такой способ регулирования в АД с короткозамкнутым ротором, когда при изменении числа полюсов статора короткозамкнутая обмотка автоматически приспосабливается к любому числу полюсов. Изменение числа пар полюсов достигается:
1) переключением числа пар полюсов одной обмотки, уложенной на статоре (см. рис. 3.7, а);
2) выполнением на статоре двух независимых обмоток;
3) выполнением двух независимых обмоток, каждая из которых с переключением полюсов (или одна из двух).
Минимальная синхронная частота вращения выпускаемых многоскоростных двигателей равна 500 об/мин, а максимальная – 3000 об/мин при 2р = 2. Диапазон регулирования скорости не превышает 6:1 (3000:500 об/мин). Направление регулирования (вверх или вниз от основной скорости) зависит от того, при каком числе полюсов скорость АД принята номинальной.
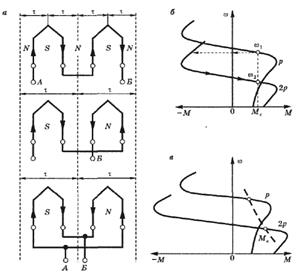
Рис. 3.7 Схемы включения полуобмоток для изменения числа полюсов
с соотношением- 2:1 (а) и механические характеристики АД
при регулировании с М = const (б) и Р = const (в)
Регулирование (теоретически) возможно при М = const и при Р = Мω = const (рис. 3.7, б, в). Реально получить такие характеристики сложно, можно говорить о некотором приближении к ним. Например, двигатель 4А 160 S 4/2 УЗ является двухскоростным (п1 = 1500 и 3000 об/мин), мощности Р2 = 11 и 14 кВт соответственно, т. е. ближе к Р = const. Двигатель 4А 200 L12/8/6/4 УЗ - четырехскоростной (500, 750, 1000 и 1500 об/мин), соответствующие мощности Р2 = 6; 10; 10,5; 15 кВт, ближе к М = const.
Такой способ регулирования экономичен, характеристики имеют высокую жесткость. Однако машина усложняется конструктивно, использование активных материалов неодинаково на разных скоростях (по индукции в зазоре Вδ и линейной токовой нагрузке А).
Двигатели с переключением полюсов находят достаточно широкое применение там, где не требуется плавного регулирования скорости: некоторые металлорежущие станки, вентиляторы, насосы, цементная и нефтегазовая отрасли, пищевая и перерабатывающая, сельскохозяйственная техника.
Date: 2015-08-06; view: 702; Нарушение авторских прав