Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Матрица переходов
|
|
При изучении процесса функционирования систем часто бывает удобно использовать понятия теории графов. Введем некоторые определения.
Графом [96] называется тройка (Е,D,Т), где Е и D — конечные множества, а T — отображение из множества D в декартово произведение Е×Е. Элементы множества Е называются узлами (вершинами) графа, а элементы множества D — ветвями (дугами) графа. Отображение Т каждой ветви графа dϵD сопоставляет упорядоченную пару его узлов (k1,k2), k1,k2ϵЕ, первый из которых называется началом ветви d, а второй — концом ветви d. Граф может быть изображен с помощью рисунка, на котором узлам соответствуют точки, а ветвям — линии со стрелками, идущими от начала к концу. Пусть заданы последовательность узлов k0, k1, k2..., kr графа и последовательность ветвей d0, d1, d2..., dr. Будем называть эту пару последовательностей путем, если узел kj-1 является началом, а узел kj является концом ветви dj, j = 1, 2,..., r. Узел k0 называется началом пути, а узел kr — концом пути, число r называется длиной пути.
Функционирование восстанавливаемой (и невосстанавливаемой) системы может быть описано графом состояний. Множество всех состояний системы Е отождествим с множеством узлов графа. Возможным переходам системы из одного состояния в другое сопоставим множество всех ветвей графа D. Будем считать, что все переходы системы за один шаг вызваны или отказом, или восстановлением некоторого элемента системы. Тем самым исключается возможность одновременного отказа или восстановления более чем одного элемента системы.
Информация о всевозможных переходах системы за один шаг содержится в матрице переходов Р размерности т×п. Каждый элемент bik этой матрицы представляет собой код состояния, в которое имеется непосредственный переход из состояния с номером k вследствие изменения состояния (отказа или восстановления) i -го элемента. Если из состояния к отсутствует переход, вызванный изменением состояния i -го элемента, то соответствующее место матрицы Р не заполняется. Таким образом, элементам матрицы Р соответствуют ветви графа с началом в узле с кодом, соответствующим состоянию с номером k и с концом в узле с кодом bik. При этом в силу принятой нумерации состояний в матрице Р дается указание о номере элемента, отказ или восстановление которого вызвало данный переход.
При изучении свойств технической системы с точки зрения надежности нет необходимости задавать множество всевозможных переходов, т. к. они полностью определяются состояниями системы и списком аргументов, связанных с этими состояниями. Тем самым матрица Р может быть построена по матрице S программно. Для построения матрицы переходов надо определить допустимые переходы для каждого элемента. Допустимыми являются переходы вида:
s→s,s’,τ,OW;
τ→s,τ,τ’,OR;
s’→s,s’;
τ’→τ,τ’;
OR→s,OR.
OW→τ,OW.
Значения s,s’,τ,τ’,OR, OW представляют собой характеристики состояния каждого элемента системы (см. разд. 4.2.2). При этом переходы s→τ или s→OW будем называть отказовыми, а переходы τ→s или τ→OR — восстанавливающими.
Чтобы определить существование перехода из состояния k в состояние l, надо сопоставить между собой компоненты векторов Аk =(а1k, а2k,.-., аmk) и Аl = (а1l, а2l,.-., аml). Непосредственный переход k→l существует вследствие отказа или восстановления элемента i 0, если переход аi0k →ai0l является отказовым или восстанавливающим, а остальные поэлементные переходы аik →ail допустимы, но не являются отказовыми или восстанавливающими. В этом случае bi0k равен коду состояния с номером l. Таким путем может быть сформирована матрица Р. Если переход k→l не существует, то соответствующий элемент матрицы Р не заполняется.
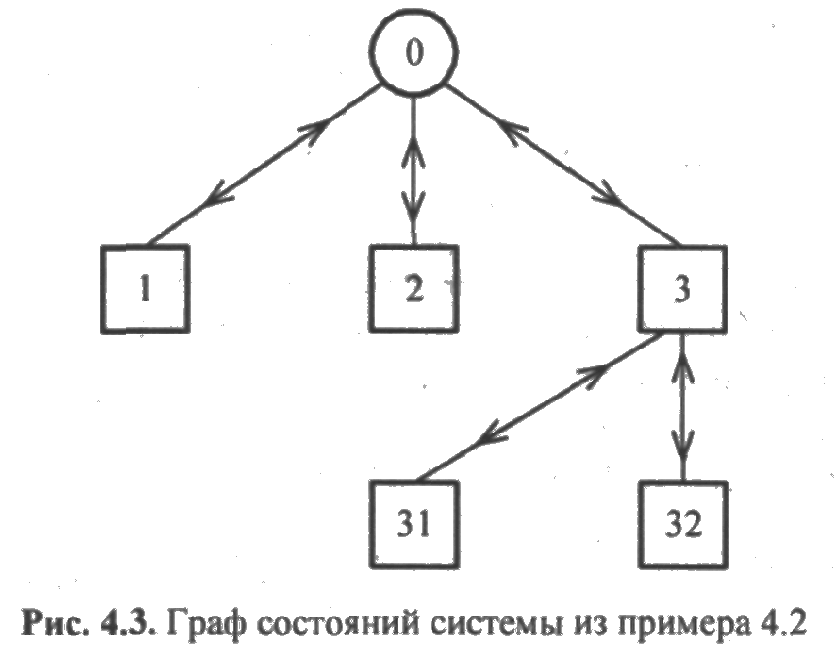
ПРИМЕР 4.2. Составить матрицу и граф состояний для основного соединения трех элементов в предположении, что при отказе 1-го или 2-го элемента остальные элементы выключаются, а при отказе 3-го элемента остальные продолжают функционировать. Восстановление отказавших элементов производится одной ремонтной бригадой с обратным приоритетом.
Решение. Система имеет следующие состояния и соответствующие им вектора:
(0) — все элементы исправны, А0 = (s1,s2,s3);
(1) — отказал и восстанавливается 1-й элемент, другие элементы простаивают вследствие прерывания их работы А1 = (τ1,s2’,s3’);
(2) — отказал и восстанавливается 2-й элемент, другие элементы простаивают вследствие прерывания их работы, А2 =(s1',τ2,s3');
(3) — отказал и восстанавливается 3-й элемент, другие элементы продолжают работать, A3 = (s1,s2,τ3);
(31) — отказали 3-й, а затем 1-й элементы, восстанавливается 1-й элемент, 2-й простаивает вследствие прерывания работы, 3-й простаивает вследствие прерывания восстановления, А4=(τ1, s2', τ3');
(32) — отказали 3-й, а затем 2-й элементы, восстанавливается 2-й элемент, 1-й простаивает вследствие прерывания работы, 3-й простаивает вследствие прерывания восстановления, А5 = (s1', τ2, τ3').
Таким образом, матрица состояний имеет вид:

Граф состояний представлен на рис. 4.3. Он имеет нумерацию узлов, принятую ранее.
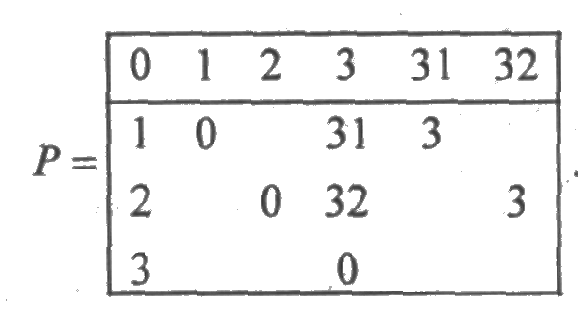
В соответствии с общими принципами построения матрицы переходов она имеет вид:
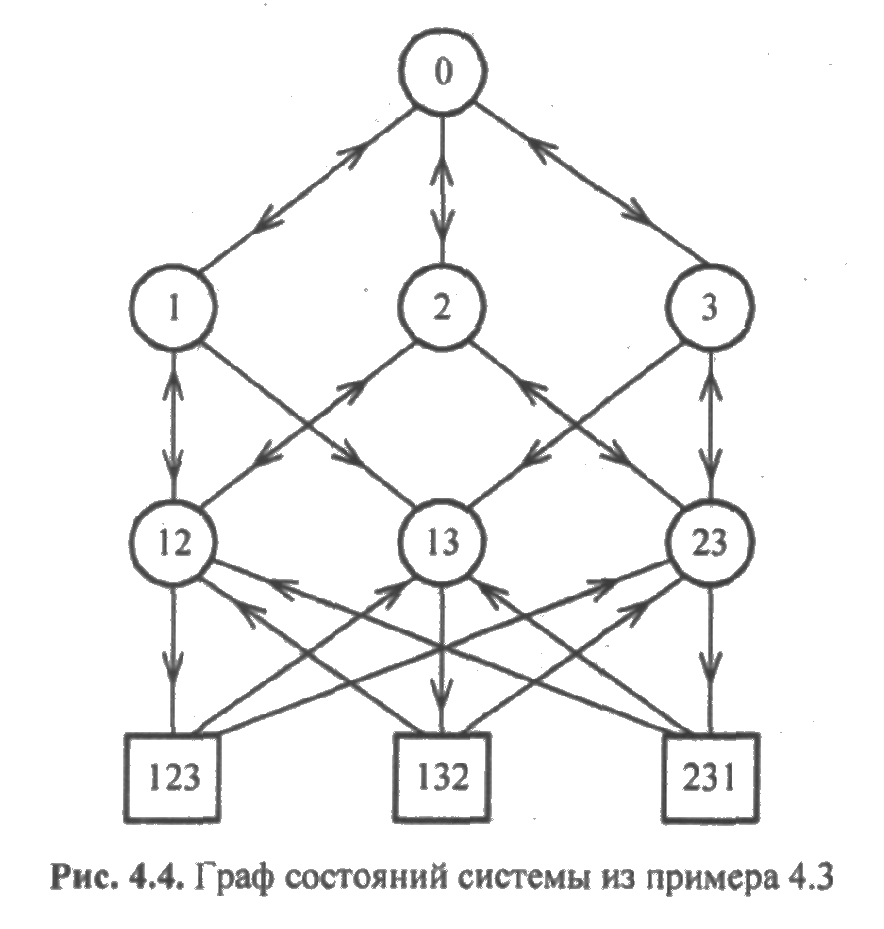
ПРИМЕР 4.3. Составить матрицу и граф состояний резервированной системы при общем постоянном резервировании кратности m = 2. Обслуживание отказавших элементов осуществляют два ремонтных органа с прямым приоритетом.
Решение. Система имеет следующие состояния:
(0) — все элементы исправны;
(k) — отказал и восстанавливается k- йэлемент, другие элементы работают;
(kl) — отказали и восстанавливаются элементы с номерами k и l, оставшийся элемент работает;
(klm) — отказали и восстанавливаются элементы с номерами k и l, оставшийся элемент находится в очереди на восстановление.
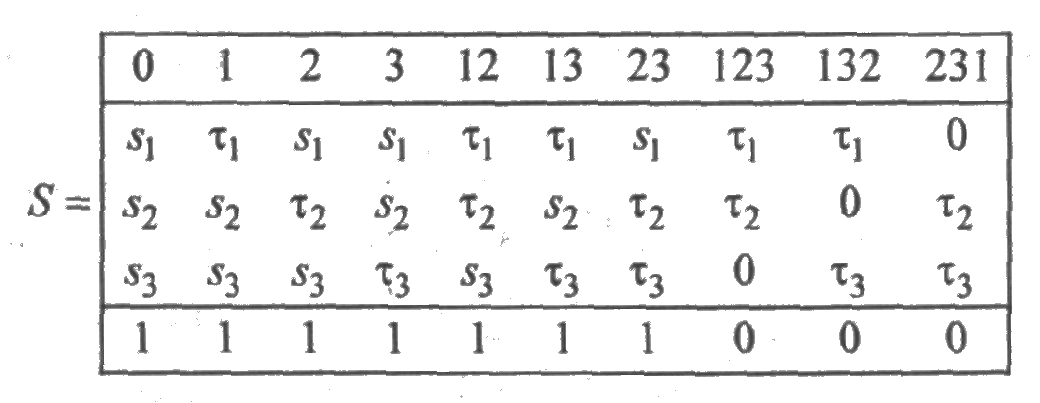
Матрица состояний имеет вид:
Граф состояний представлен на рис 4.4.
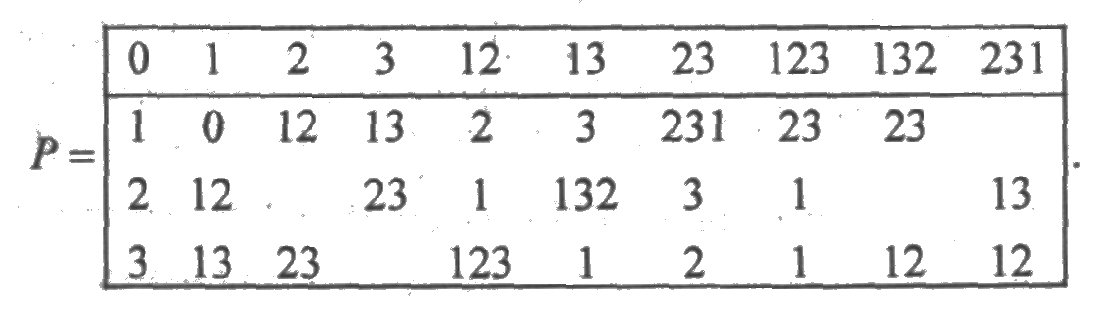
По графу легко составляется следующая матрица переходов:
4.2.4. Выражения для вероятностей состояний и параметров переходов между состояниями
Функционирование технической системы с произвольными законами распределения элементов может быть описано системой интегральных уравнений или эквивалентной системой дифференциальных уравнений в частных производных. Эти системы уравнений строятся непосредственно по матрице состояний S и матрице переходов Р.
Сначала получим явные соотношения для вероятностей состояний системы рk(t) и параметров перехода из состояния в состояние ωkl(t), k,l ϵ Е. Пусть k0 — начальное состояние процесса функционирования технической системы. Обозначим через Г(r)k0,k множество всех путей графа состояний длины r с началом в узле k0 и концом в узле k. Двигаясь по пути γ ϵ Г(r)k0,k, можно попасть из состояния k0 в состояние k за r шагов (некоторые ветви при этом могут повторяться). Напомним, что за один шаг принимается переход, обусловленный или отказом, или восстановлением какого-либо одного элемента системы. Предположим, что путь γ проходит через состояния с номерами k0,k1,k2,:,kr=k. Обозначим через xj время пребывания системы в состоянии kj, а через x = (x0, x1,…., xr)— вектор с компонентами xj.
Рассмотрим изменение состояний i -го элемента на пути γ и определим функции  характеризующие плотность распределения вероятностей пребывания i -го элемента в состоянии kj в течение времени xj, j = 0,1,2,..., r. Каждому узлу kj отвечает значение i -й компоненты
характеризующие плотность распределения вероятностей пребывания i -го элемента в состоянии kj в течение времени xj, j = 0,1,2,..., r. Каждому узлу kj отвечает значение i -й компоненты  , равной одной из величин: s,s',τ,τ',OR,OW, при этом указанные величины чередуются в следующем порядке: OR (очередь на работу), s или s' (работа или прерывание работы), OW (очередь на восстановление), τ или τ' (восстановление или прерывание восстановления). Некоторые из приведенных величин могут быть опущены. Множество индексов {0,1,2,..., r }представимо в виде объединения непересекающихся подмножеств, состоящих из индексов, следующих в порядке возрастания:
, равной одной из величин: s,s',τ,τ',OR,OW, при этом указанные величины чередуются в следующем порядке: OR (очередь на работу), s или s' (работа или прерывание работы), OW (очередь на восстановление), τ или τ' (восстановление или прерывание восстановления). Некоторые из приведенных величин могут быть опущены. Множество индексов {0,1,2,..., r }представимо в виде объединения непересекающихся подмножеств, состоящих из индексов, следующих в порядке возрастания:

где

Тогда функция  определяется равенством
определяется равенством

где fi(t) и gi(t) — плотности распределения времени безотказной работы и времени восстановления i -го элемента. С точностью до бесконечно малой величины Δх0Δx1….Δxr функция равна, очевидно, мгновенной вероятности того, что i -й элемент пребывает в состоянии kj время xj, j =0,1,2,…, r.
Предположим, что последнее состояние k = kr является состоянием работы или восстановления i -го элемента. Тогда имеет смысл говорить о мгновенной вероятности того, что i -й элемент в каждом состоянии kj, кроме последнего, пребывает время xj, а в последнем состоянии— время, не меньше xr.
Совершенно ясно, что эта вероятность равна

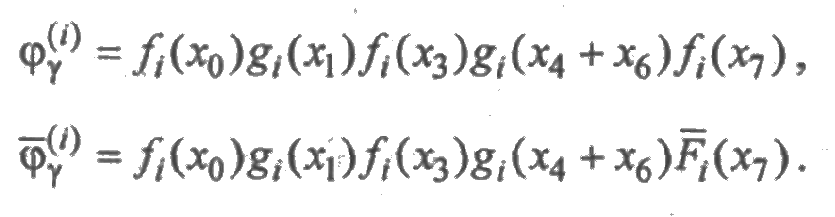
ПРИМЕР 4.4. Пусть i -й элемент системы пребывает в состояниях s, τ, OR, s, τ, τ', τ, s, как показано на временной диаграмме (рис. 4.5). Требуется составить выражения для функций  и
и  ,
,
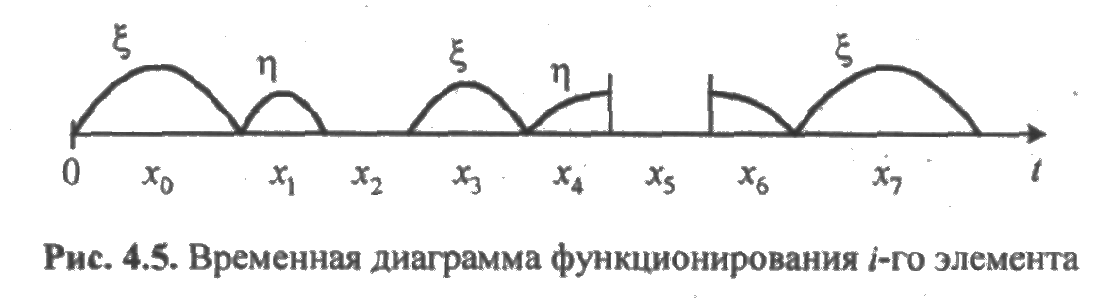
Решение. На рис. 4.5 x 0, х1, х2, х 3, х4, х5, х6, х7 — времена пребывания 1-го элемента в соответствующих состояниях. Из диаграммы следует, что
Вероятность рk(t) пребывания системы в момент временя t в состоянии k находится по формуле полной вероятности. Пусть Hγ(t) — событие, состоящее в том, что в момент t система достигла состояния k, двигаясь из начального состояния k0 по пути γ ϵ  . Вероятность этого события равна
. Вероятность этого события равна

где σr(X) = t обозначает гиперплоскость  в (r + 1)-мерном евклидовом пространстве. Искомая вероятность равна сумме вероятностей событий Нγ(t), вычисленной по всем путям γ, ведущим из состояния k0 в состояние k, т. е.
в (r + 1)-мерном евклидовом пространстве. Искомая вероятность равна сумме вероятностей событий Нγ(t), вычисленной по всем путям γ, ведущим из состояния k0 в состояние k, т. е.

Рассмотрим переход системы из состояния k в состояние l. Пусть этот переход вызван отказом или восстановлением элемента с номером i0 = i 0(k,l). Параметр перехода ωk,l (t) представляет собой мгновенную вероятность перехода в момент t из состояния k в состояние l, отнесенную к единице времени, т. е.
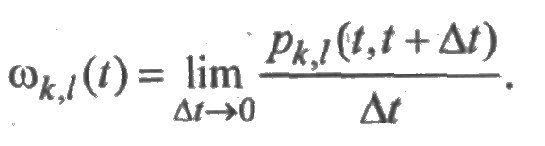
Поэтому для получения параметра перехода необходимо в формуле (4.5) все функции при i ≠ i0 оставить без изменения, а функцию  — заменить на выражение
— заменить на выражение

Таким образом,

Выражения (4.5) и (4.6) похожи по форме записи, поэтому их можно рассматривать совместно. С этой целью обозначим через Yk{Аk,t) = Yk(a1k, а2k,,..., атk, t) вероятность пребывания системы в момент времени t в состоянии k в предположении, что после момента t i -й элемент системы сохранит свое состояние работоспособности или восстановления в течение времени а1k (i = 1, 2,..., т). Предположим, что функции Yk имеют частные производные по всем переменным вида s и τ. Обозначим через yk смешанную производную по этим переменным порядка α=| Rk ᴗ Wk | со знаком "+" или "-", определяемую формулой
Функции уk представляют собой плотности распределения вероятностей и являются неизвестными в системе интегральных уравнений.
Поскольку

то

Вероятности состояний и параметры переходов находятся по функциям уk с помощью единообразных соотношений. Действительно, как следует из (4.8), а также из (4.5) и (4.6), имеют место равенства:

где i 0 = i0 (k,l) — номер элемента, вызвавшего переход k→l, а вектор  ) получается из Аk, если положить в нем компоненту с номером i 0 равной нулю, т.е.
) получается из Аk, если положить в нем компоненту с номером i 0 равной нулю, т.е.  Интегрирование в (4.9) и (4.10) распространяется на все "ненулевые" значения переменных aik. В некоторых случаях удобно вычислять неизвестные функции прямо через вероятности Yk в соответствии с формулами:
Интегрирование в (4.9) и (4.10) распространяется на все "ненулевые" значения переменных aik. В некоторых случаях удобно вычислять неизвестные функции прямо через вероятности Yk в соответствии с формулами:

где 0 = (0, 0,..., 0) — нулевой вектор. Отсюда, в частности, следует, что при малых значениях параметров аik справедливо разложение

Суммирование в правой части распространяется на все состояния k и l, между которыми имеются переходы k→l.
4.2.5. Правило составления системы интегральных уравнений
Для каждого состояния k ϵ Е интегральное уравнение составляется следующим образом. Определяются все состояния, из которых имеется одношаговый переход в состояние k. Пусть j — одно из таких состояний, и переход из j в k вызван отказом или восстановлением элемента с номером i 0 = i0 (k,l). Обозначим через Хjk=(х1,x2, …, хт) вектор, в котором композиты х1 принимают два значения: х (переменная интегрирования) или 0. Если в состоянии k элемент с номером i работает или восстанавливается, то xi = х. Если в состоянии k элемент с номером i находится в состоянии простоя, то хi = 0.
Пусть для i -го элемента hi есть плотность распределения времени безотказной работы fi, если аik = si, или плотность распределения времени восстановления gi, если аik = τi. Тогда справедливо уравнение:

Суммирование в правой части производится по всем состояниям j, из которых имеется непосредственный переход в состояние k. Произведение под знаком интеграла распространяется на все индексы i, для которых вектор Аk \  имеет "ненулевые" компоненты. Для начального состояния k0 к правой части соответствующего интегрального уравнения (4.11) добавляется слагаемое
имеет "ненулевые" компоненты. Для начального состояния k0 к правой части соответствующего интегрального уравнения (4.11) добавляется слагаемое
обусловленное началом функционирования системы.
В справедливости системы (4.11) можно убедиться путем подстановки в нее функций (4.8). Эта система описывает функционирование технической системы с произвольными законами распределения времени безотказной работы и времени восстановления элементов при заданных плотностях распределения вероятностей. Она содержит в себе всю вероятностную информацию о работе и восстановлении технической системы.
Решение системы (4.11) позволяет определить по формулам (4.9) и (4.10) соответственно вероятности пребывания системы во всех состояниях и параметры переходов из состояния в состояние. Далее по известным соотношениям рассчитываются любые характеристики надежности.
Описание с помощью системы интегральных уравнений является универсальным и при сделанных ранее допущениях может служить математической моделью функционирования любого сложного устройства с конечным или счетным множеством состояний. В частности, эта система пригодна для описания невосстанавливаемых и восстанавливаемых устройств при любом виде резервирования. Она может быть использована для описания стационарного и нестационарного режимов эксплуатации. Кроме того, в ряде случаев система (4.11) позволяет получить некоторые качественные свойства функционирования системы.
Date: 2015-07-17; view: 2606; Нарушение авторских прав