Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Классификация методов зондирования рассмотрим на примере съемки на открытых горных работ. См. рис
|
|
| Методы дистанционного зондирования |
| Радиолокационная съемка |
| Сканерная съемка |
| По элементное сканирование |
| Матричное сканирование |
| Фотографическая съемка |
| Черно-белая съемка |
| Цветная съемка |
| Спектрозональная съемка |
| Многозональная съемка |
| Инфракрасная съемка |
Фотографирование местности как метод ДЗ Земли является наиболее распространенным.Основным теническим средством является камера кадрового типа, который фиксируется изображением местности на светочувствительный материал. Взвависимости от применяемого светочувствительного материала и конструкции фотоаппарата, различают следующее типы фотографирования местности:
Съемка с летательного аппарата наиболее часто применима и производительна. Аэрофотоаппарат(АФА) основное тех. средство при фотографировании. В последние десяятилетие в ходе развития космических исследований, кроме фотографических систем съемки развитие получили электронные методы регистрации радиационного излучения поверхности Земли. Наибольший интерес и перспективы представляют сканирующие системы, которые обладают высокой геометрической точностью и широкими спектральными возможностями. Из известных в литературе самолетных вариантов сканирующих систем наиболее испытан сканер фирмы «Бендикс», называемый часто М2S. Рассмотрим схему этого устройства (Ход лучей в многоспектральном сканере).
Излучение с элементарного участка местности отражается эллиптическим зеркала на отклоняющее зеркало 3 в объектив 4. Объектив фокусирует лучи через дихроматический фильтр 5в щель диафрагмы 6. Получаемое при этом, интерфериционная картина, состоящая из полос яркостей соотвествующий разным зона спектра, собирающей линзой 7 проецируется на экран 8. С помощью линзой 9 интереферационной полосой яркости проецируется на плату с детекторами 10. Детектор регистрирует интенсивность излучения в соответствующей зоне спектра и с помощью электронной аппаратуры записывает уровень яркости в цифровой форме на носитель памяти. Эллиптическое зеркало 2 с помощью двигателя 1 вращается, так что за один оборот фиксируется излучение с элементарных участков местности образующие полосы перпендикулярную направлению полета самолета. Если теперь детектором записывают в цифровой форме яркость излучения с каждого элементарного участком называемой пикселем, воспроизвести на фотоматериале или экране дисплея в виде совокупности точек оптической плотности пропорционально яркости то получим изображение местности в узком диапазоне спектра.
В сканере фирмы «Бендикс» излучение в видимой части спектра регистрируется одновременно по 10 каналам, тем более фиксируется тепловое излучение детектором 11. Спектральные характеристики каналов (см. таблицу.):
| Номер канала | Часть спекрта ищлучения | Средняя длина волны, нм | Ширина полосы пропускания,нм |
| Видимое | |||
| Видимое | |||
| Видимое | |||
| Видимое | |||
| Видимое | |||
| Видимое | |||
| Видимое | |||
| Видимое | |||
| Видимое | |||
| Видимое | |||
| Тепловое |
Некоторые геометрические элементы показаны на рис.
Размеры А и Б на местности одного пикселя зависит от вел-ны элементарного угла «омега» поле зрения сканера, который для системы М2S равен 0,0025 радиан. Т.о. при отнесенным расположении сканирующего луча, размеры пикселя при H=1км cоставляют: А=6,1м а Б=3,9 м. В зависимости от угла «альфа» - направление на пиксель, ее площадь на местности увеличивается почти в 4 раза, при угле сканирования 100 град.
Рассмотренное поэлементное сканирование имеет недостатки геометрического характера такие как:
1. Изменчивость размера пикселя на местности
2. Разновременность регистрации излучения в полосе сканирования и др.
Поэтому более совершенны матричные сканеры, в которых детекторы образуют линейки (соответствующие строкам из пикселя изображения) расположены перпендикулярно направлению полета. Упрощенная геометрическая схема такого способа показана на рис. (MOMS). Для дальнейшей стереоскопичной обработки сканирование выполняется на три строки детекторы расположенной под заданным углом бета0. Такая геометрическая концепция развивается в системах MOMS. Матрица детектора содержит в строке до 10 тысяч пикселей, кроме того излучение по каждому из направлений может фиксироваться на несколько рядов детекторов каждый из которых чувствителен к узкой зоне спектра.(см рис.схема расположение детектров)
Детекторы излучения строится на основе кремниевых фотодиодов или теллуриодов ртути и кадмия.
Матричные сканеры имеют лучшее характеристики. На их основе могут работать системы сравнительно крупномасштабные многоспектральные съемки местности. Электронные системы съемки по сравнению с фотографическими имеют то преимущество что расширяют область фиксации излучения при более высокой спектральной избирательностью и представляют результаты съемки и обработку на ЭВМ.
Фотографические так и сканирующие системы съемки регистрирует отраженное солнечное излучение и дают хорошие результаты, только при благоприятных погодных условиях: отсуствие облачности, благоприятном угле освещение солнцем, достаточности прозрачности атмосферы и др. Этого не бывает во время съемки J Поэтом в перспективе следует ожидать примение активным радиолокационных систем и особенно систем с высоким геометрическим разрешением.
Обработка данных ДЗ.
Фотограмметрическая съемка как данные ДЗ включает 2,тесно-связанных, этапа:
· Определение геометрических параметром съемки и объектов.
· Определение качественных и количественных характеристик объектов съемки.
Второй этап обработки изображение обязательно включает выполнение следующих операций:
1. Классификация объектов съемки на изображении
2. Распознавание объектов по изображениям.
Корреляция изображений.
| Источники информации ДЗ. |
| Оперативная фотосъемка |
| Архивные материалы предыдущих съемок |
| Формы представления данных. |
| Фотоснимки |
| Дигитализация фотоснимков |
| Цифровое изображение |
| Синтез цветного изображения |
| Визуальное дешифрирование |
| Монокулярное дешифрирование |
| Стереоскопическое дешифрирование |
| Машинная обработка изображений |
| Операции над изображением |
| Трансформирование |
| Визуальное представление |
| Стереоизмерение |
| Компараторы |
| Универсальные приборы |
| Дифференциальное трансформирование |
Структурная схема методов обработки информации ДЗ.
Тенденции развития современной техники и технологии показывает, что цифровое представление изображений на магнитных носителях более эффективно, и позволяет применять при обработке методы, недоступные аналоговым средствам обработки фотоснимков, поэтому обязательный такой этап, как дигитализация фотоснимков, то есть представление их в цифровой форме.
При дигитализации фотоснимок делят на узкие полосы или строки, каждую из которых разбивают на элементарные участки – пиксели.
Размер “Дельта” пикселей по осям координат X и Y выдерживается постоянно, его координата определяется номером строки и номером пикселя строки “j”, в пределах пикселя определяется средняя интегральная оптическая плотность изображения и относится к его центру. Следовательно непрерывная функция F(x) изменение оптимальной плотности вдоль оси строки (рис. б) заменяется дискретной ступенчатой функцией F(x)(с палкой над F). Значение оптической плотности квантуется, то есть весь диапазон делится на 256 уровней, так что измеренная плотность характеризуется целым числом от 0 до 255. Выборное число соответствует способности глаза человека различать всего около 250 уровней интенсивности яркости изображения. Кроме этого указанные величины можно записать всего в одном байте памяти ЭВМ. Естественно, что замена непрерывной функции плотности изображения на ступенчатую приводит к тем большему искажению или отличию цифрового изображения от фотоснимка, чем больше величина пикселя, однако чрезмерное уменьшения “дельта” в силу технических причин и физических процессов при считывании и воспроизведении изображения приводит к нежелательным искажениям. При дигитализации фотоснимков рекомендуется использовать величину “дельта” равную 50 или 100 мкм. При использовании рационального метода интерполирования квантованных оптических плотностей практически без искажений восстанавливается исходная функция изменения оптической плотности, таким образом деление снимка на строки с равным числом пикселей требует запоминание только величин оптических плотностей, а положение пикселем на снимке определяется адресом величины плотности в массиве данных, соответствующем конкретному снимку. Для фотоснимков камеры MSK – 4, считая размер изображения 40х60 мм, при дигитализации кадров ”дельта” равно 100 мкм, требуется около 0,24Мб памяти ЭВМ.
А для снимка АФА 18х18 см, около 1Мбайт. Если учитывать возможности программной свертки информации по снимку, то эти объемы требуемой памяти можно считать предельными. Это свидетельствует о реальному техническому осуществлению, накоплению и использованию архивных данных съемки в цифровой форме на машинных носителях информации.
Решение задачи литомориторинга требует применение комплексной технологии материалов фотосъемки. Основные составляющие такой технологии показаны на рисунке (дадут).
Визуальные методы интерпретации изображения можно разделить: монокулярные, стереоскопические и методы синтезирования цветного(псевдо цветного) изображения. Экспериментальные данные показывают, что использования техники искусственного цвета позволяет путем вариации цветовых оттенков выявить и четко оконтурить детали структуры изображения. В то время как на ч/б снимках трудно распознать слабые яркостные различия. Цветные или псевдо цветные изображения можно получить с помощью многозонального проектора MSP-4C(Германия). В приборе 4 многозональных фотоснимках в частности, полученной фотокамерой MSK-4 сводится, в одно изображение с кодированными цветами. Этот прибор позволяет с помощью светофильтров получать множество вариаций окрашенного изображения.
Выявленное на фотоизображение качественная и структурная особенности необходимо измерить, т.е. определить их пространственное положение и размеры. Стереоскопические методы измерения являются наиболее точными и эффективными. На аналоговых универсальных фотограмметрических приборах, таких как стереометрограф, топокарт выполняет картирование изображения фотосъемки. С помощью специальных приставок к топокарте можно выполнить дифференциальное оптико-механическое трансформирование фотоснимков и получить так называемый ортофотоснимок, который по метрическим данным соответствуют плану местности. Широко применяется за рубежом аналитические универсальные стереоприборы, который совмещает в себе возможности компараторов и универсальных приборов и кроме того способны обеспечить гибкую технологию обработки практически любых изображений. Схема прибора показана на рис. 27
Выделяют три основные конструктивные части: наблюдательную и измерительную систему; систему управление(мини ЭВМ); периферийное устройство(дисплей, кардинатограф);
Известна специализированные системы цифровой обработки изображения на ЭВМ. Все эти системы выпускаются серийно. И предназначены на многоцелевого применения. Все они построены по модульному принципу. Т.е. взависимости от конкретных условий объединены в систему серийно выпускаемые технические средства и созданы для них математическое ПО. Следует отметить что всякая система цифровой обработки изображений, должна быть системой: человек – машина. Т.е. пользователь является обязательной ее основной части. см рис 28.
Аэрофотосъемка
Виды аэрофотосъемок.
Аэрофотосъемкой называется процесс фотографирования земной поверхности с самолета или другого летательного аппарата.
Аэрофотосъемку можно классифицировать по типу используемого аэрофотоаппарату:
· кадровый,
· щелевой,
· панорамный.
По типу используемого летательного аппарата:
· самолет;
· вертолет;
· аэростат;
· ИСЗ;
По направлению оптической оси АФА:
· Плановая (с углами наклона до 3 град);
· Перспективная (с заданным углом наклона более 3 град.);
· Планова-перспективная;
По характеру светочувствительных материалов:
· Черно-белая;
· Цветная;
· Спектрозональная;
По времени суток:
· Дневная;
· Ночная;
По назначению:
· Топографическое;
· Разведительная (для инженерное и геологических изысканий);
По количеству изображений аэрофотоснимков:
· Маршрутная
· Площадная (многомаршрутная)
По масштабу:
· Крупномасштабная
· Среднемасштабная
· Мелкомасштабная
Топографическая аэрофотосъемка выполняется днем при высоте солнца более 10 градусов. Обычео с самолета, кадровым АФА. При отвесном положением оптической оси. Случайные наклоны до 3 градусов. Для ее выполнения используют аэрофотоаппараты типа АФА–ТЭ, АФА–41, АФА–ТЭС, ТАФА.
В качестве носителя съемочной аппаратуры самолеты (АН-30, ИЛ и т.п.) и вертолет К-26. Топографическую аэрофотосъемку в зависимости от объекта и задания можно разделить:
Одинарная аэрофотосъемка - воздушное фотографирование отдельных сравнительно небольших участков земной поверхности на аэрофотоснимках несвязанных между собой продольными и поперечными перекрытиями.
Маршрутная аэрофотосъемка – воздушное фотографирование полосы местности в виде отдельного прямого, криволинейного или ломаного маршрута. Последовательные аэрофотоснимки, которые взаимосвязаны продольным перекрытием.
 Многомаршрутная или аэрофотосъемка площади применятся для картографирования крупных площадей земной поверхности путем прокладки прямолинейным параллельных между собой аэрофотосъемочных маршрутов; При этом аэрофотоснимки каждого маршрута перекрывают аэрофотоснимки предыдущего. Это перекрытие называется поперечным.
Многомаршрутная или аэрофотосъемка площади применятся для картографирования крупных площадей земной поверхности путем прокладки прямолинейным параллельных между собой аэрофотосъемочных маршрутов; При этом аэрофотоснимки каждого маршрута перекрывают аэрофотоснимки предыдущего. Это перекрытие называется поперечным.
Масштабом аэрофотосъемки называется отношение линейных размеров изображение на аэрофотоснимках соответствующим действительным линейных размерам объектов на фотографируемой местности. Масштаб съемки зависит от фокусного расстояния АФА и высоты фотографирования. 1:m = ab/AB = f/H. где m – знаменатель масштаба, показывающий во сколько раз изображение объекта на аэрофотоснимке меньше действительных его размеров на местности. Полученное выражение показывает, что масштаб аэрофотосъемки равен отношению фокусного расстояния АФА к высоте аэрофотосъемке. Т.е. чем больше фокусное расстояние, тем крупнее масштаб аэрофотосъемке. Обычно масштабы аэрофотосъемки более 1:10000 относят крупным, масштабы 1:10000 и более 1:30000 к средним, а остальные(1:70 000 – 1:80 000 и менее) – мелким.
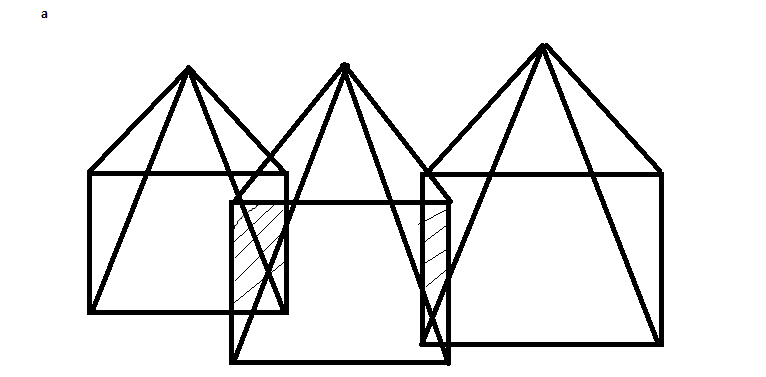
Расчет перекрытия и базиса аэрофотосъемки.
Величина продольного перекрытия задаётся в процентах от размера продольной стороны аэрофотосъемки lx взятого за 100%. Qx=Px/lx * 100%. Где Px размер перекрытой части фотоснимка по направлению полета. Для обеспечения стереофотограмметрической обработки обычно требуется 60% продольно перекрытая аэрофотосъемка. При продольном перекрытие меньше чем 56 % получаются разрывы. Для их исключения необходимо строго выдерживать интервалы между моментами экспозиции АФА. Расстояние между 2 смежными точками фотографирования называют базисом аэрофотосъемки, и обозначается Bx.
Найдем величину базису аэрофотосъемки выраженную в процентах от Lx. На рисунке О1 и О2 положение самолета в момент в 2 последних экспозиций. N1 и N2 соответствующий этим положениям точки местности, которые изобразятся центрам аэрофотоснимка. О1О2=N1N2= Bx – искомый базис аэрофотосъемки. Заштрихованная зона – продольное перекрытие – часть местности которая снята на двух смежных аэрофотоснимках. Из параллелограмма АО1О2С => О1О2=АС. Поэтому базис Вх составляет (100-qx)% от продольного линейного захвата Lx. Bx=(lx(100-qx))/100 или на аэрофотоснимке bx=lx/100 (100-qx).
Величина поперечного перекрытия задаются так же в процентах от размера аэроснимка перпендикулярного к направлению съемочного маршрута. Т.е. поперечной стороне аэрофотоснимка ly применяемы за 100 %. qy=py/ly *100%. Где py размер части аэрофотоснимке перекрытой аэрофотоснимком соседнего маршрута. Для картографирования требуется 30% поперечное фотографирование аэрофотоснимка. Если перекрытие меньше 20% они не пригодны для фотограмметрической обработки. Аналогична формула базиса Bx запишем формулой для расчета расстояния между съемочными маршрутами By= (Ly*(100-qy))/100, by=ly/100 (100-qy), где Ly- захват местности линейный, поперечный. by- расстояние между маршрутами в масштабе аэрофотоснимка. Перекрытие аэрофотоснимка устанавливают исходя из масштабов аэрофотосъемки а рельефа местности и применяемого аэрофотосъемочного оборудования.
Расчет элемента захода.
При переходе с пройденного съемочного маршрута на очередной маршрут называется заходом. Способом заходам определяется отношением заданного расстояния между съемочными маршрутами и радиусами виража при крине 30 градусов. В тех случаях, когда By больше 2R заход выполняется двумя несопряженными виражами. При By меньше 2R двумя сопряженными виражами – Заход с Отворотом. При By=2R выполняется одним виражом.
Геометрические параметры космической фотосъемки.
Космическая фотосъемка земной поверхности планет солнечной системы с использованием оптико-электронных средств и фотоматериалов производится в разных масштабах и при различных положениях оптической оси фотокамеры. Масштаб плановой космической фотосъемки для центра снимка определяется высотой полета КЛА и величиной фокусного расстояния космической съемочной камеры 1/m=f/h где h расстояние до подспутниковой точки в момент экспонирования светочувствительного материала, m знаменатель масштаба съемки..
Положение оптической оси определяется методом фотографирования. Плановое фотографирование выполняет при положение оптической оси направленное к центру Земли.
Космическая съемка при которой оптическая оси фотосъемочной камеры составляет с вертикалью гамма>10 градусов называется перспективным. При перспективной фотосъемки заданный угол создается отклонением оптической оси от вертикали при установке космической камеры под заданным углом плоскости иллюминатора. Масштаб изображение при перспективной космической съемки – величина переменная, для каждой его точки, определяются зависимостью:
1/mi=dl/dLi dl – длина на снимке, dLi - длина на местности.
С орбиты КЛА выполняют одномаршрутное или многомаршрутное фотографирование. Во время полета КЛА на каждом витке получают один маршрут. Последовательные маршруты на одних витках должны перекрываться между собой. Перекрытием называют части 2 соседних космических снимков с изображением одного и того же участка местности. P - Продольное перекрытие космические снимков в направление полета КЛА. Q – Поперечное перекрытие в направление перпендикулярное направлению полета КЛА. Промежуток времени между моментами началами выдержек 2 последовательных кадров при маршрутной космической съемки необходимы для получение заданной величины продольного перекрытия, называется интервалами фотографирования τ. Отношение величины перекрытия к линейному размеру космического снимка в том же направление определятся коэффициентами перекрытия. Kp Kg
Основные геометрические съемочные параметры – высоту съемки, продольное и поперечное перекрытие, площадь снимаемой поверхности рассчитывают с учетом фотограмметрических требований. Аналитическое определение этих параметров значительно усложняется по сравнение с методами аэрофотосъемки. Общая формула для определения продольного, поперечного перекрытия снимков для случая космической съемки с круговой орбиты имеет следующий вид:
P=((2θ-ε)/2θ)*100%= {1-ε/(2[arcsin(((H+R)/R)*sinω)-ω])}*100%. (1)
При съемки с орбиты близкой к круговой, имеется ряд центров проектирования S1,S2 … Si. L1,L2 – последовательно перекрывающиеся снимки. 2ω –угол поля зрения космической съемочной камеры.εi – величина планетоцентрических углов между последующими квадратами. Максимальная возможность охвата поверхности планеты одним снимком обеспечивается при условии sin(ωmax)=R/(H+R). (2)
В этом случае боковые проектирующие лучи касаются его поверхности, и значение угла θ максимальна вся снимаемая площадь лежит в пределах круга радиус, которого Rф=R*sinθmax. (3)Определение продольного перекрытия снимка требует учета вращения Земли. В этом случае формула для перекрытия вдоль направления движения КЛА по орбите будет иметь вид:
Rx={1-εx/(2[arcsin(((H+R)/R)*sinω)-ω])}*100%.(4)
εx – планетоцентрический угол, определяемый по формуле. εx=τ/Tka*360⁰.(5)
Tka – период вращения КЛА вокруг планеты; τ - интервал времени между последующими экспозициями.
Формулы 4, 5 справедливы при рассмотрении гипотетического полета относительно вращающейся Земли. В действительности в следствии вращения земли необходимо рассматривать движение КЛА не в абсолютно неподвижной системе координат а относительно поверхности Земли. Ибо именно этой скоростью определяется величина интервала фотографирования при заданном продольном перекрытии космических снимках. Формула для определения скорости КЛА относительно земной поверхности. Может быть получена из геометрических зависимостей. Рис. 105. Лямбда – долгота восходящего угла орбиты КЛА, i – наклонение орбиты, W – вектор скорости полета КЛА относительно поверхности Земли. V1 – проекция вектора W на поверхность Земли. V2 – вектор линейной скорости суточного вращения под спутниковой точки. Фи – широта подспутниковой точки.
Скорость перемещения КЛА относительно поверхности Земли, т.е. путевая скорость V1 носителем может определена по формуле V1=R/(R+H) * V, V – орбитальная скорость. Для круговой орбиты модуль вектора орбитальной скорости определяется по формуле. Vk= 2pi * (R+H)/Tka(8), Tka- период вращения КЛА. В этом случае формула 8 примет вид V1k=2piR/Tka (9). Модуль вектора линейной скорости суточного вращения точки Земли, в которую проектируется в данный момент КЛА можно определить по формуле V2=2pi* Rcos(фи)/Tз, Тз – период вращения Земли. С учетом формул 9, 8 на базе формулы 6 и теоремы косинусов получим модуль вектора путевой скорости носителя для круговой орбиты Wk= 2piR=sqr(1/(T2ka) + cos2(фи)/T2з – 2сos(фи)*cos(гамма)/Tka*Tз).
Где tg(гамма)=
От путевой скорости носителя перейдем к его угловой скорости ωk для момента пересечения подспутниковой точкой с широтой фи: ωk= Wk/R. Окончательная формула для определения продольного перекрытия по х, учитывающие вращение Земли и основные элементы орбиты будет иметь следующий вид Px=[1-(180⁰*t* sqr(1/(T2ka) + cos2(фи)/T2з – 2сos(фи)*cos(гамма)/Tka*Tз))/ arcsin(((H+R)/R)*sinβ)- β)]*100%.
КЛА на новой высоте пройдет по новому маршруту, отстоящему по долготе от предыдущему маршруту на величину лямбда т. В связи с этим поперечные перекрытия между маршрутами космической съемки обусловлена главным образом вращением земли. Величину угла лямда т можно определить по формуле: лямда т = 2piωз*sqr((R+H)2/мю). Где ωз– круговая скорость вращения Земли, мю- гравитационный параметр Земли. Минимальное поперечное перекрытие будет в момент пересечения подспутниковой точки экватора. Ибо в этом случае величина угла лямда т будет максимальной. Заметим что определения поперечного перекрытия, что маршруты орбитальной съемки по общей формуле перекрытия(1) необходимо знать величину угла εу см. рис 105.
Пусть А - точка пересечения подспутниковой точкой экватора на предыдущем ветке. Б – точка пересечения подспутниковой точки экватора на последующим ветке. Определим значение угла εу.
εуm=sin(лямда т)*sin(i).(15)
Анализ формулы 15 показывает, что наиболее слабым местом при обеспечении необходимого процента поперечного перекрытия является область экватора. Очевидно, что значения угла εу определенной по формуле 15 справедливо только для экватора. Для всех широт отличных от нуля вместо угла наклона орбиты i следует брать угол гамма′ т.е. угол между проекции траектории движения КЛА на вращающиеся Землю и параллелью широтой фи. Для определения угла гамма′ можно использовать следующую формулу:
Ctg(гамма′)=1/([sqr(1-tg2(фи)/tgi)] * tgicos2(фи)) - ωз*Tka*cos(фи)/(2pi*sqr((1-sin2(фи))/sin2i)*s0in(i)).
В следствии вращение Земли подспутниковая точка пересекает экватор не под углом i, а под некоторым углом i′ значение которой можно получить как частный случай формулы 16 для широты фи=0. ctgi′ = coseci(cosi-Tka/Tз).
Кроме того длина дуги лямда т в линейной мере различна для различных широт и приближенное изменение ее длины пропорционально косинусу широты. Т.е. лямда′ т =лямда т *cos(фи) (18)
Поперечное перекрытие между маршрутами орбитальной фотосъемки выполняется на основе формулы один при условии sin(эпсилент y) = sin(лямда т штрих)*sin(гамма штрих), где лямда т штрих определяется формулой 18 а гамма штрих – 16. Для орбит значительно отличающихся от круговых, например элептических исходная общая формула 1 для определения продольных и поперечных перекрытий космических снимков изменится:
Р′=[1+(θi+1′ - θi′ - εi′)/2 θi+1′]*100% (20).
Значение плантецентрических углов θ можно определить слудующем образом: θi′ = arcsin((H+R)/R * sinω)-ω. Где H+R=r – расстояние от центра притяжение до КЛА. Определяется H+R=r=р/(1+е*socθ) Где р – параметр орбиты, е – эксцентриситет. Заметит что в этом случае планетоцентрический угол между последующими экспозиции является функции угловой скорости КЛА по элептической орбите при H+R не равной константе. В отличии от орбиты близкой к круговой где H+R=const.
ТУТ ТО, ЧТО ИДЕТ ПСОЛЕ ПЕРВОЙ КР.
Date: 2016-11-17; view: 723; Нарушение авторских прав