Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Механизмом постоянной скорости
|
|
Поскольку в системе «Каскад» релейный регулирующий прибор, например P–21, формирует только ПИ или П (при охвате жесткой обратной связью от исполнительного механизма) закон регулирования, то для формирования ПИД-законов регулирования необходимо дополнить схему дифференциатором, в качестве которого в системе гсп (Каскад) применяется блок Д–01.
При регулировании одного регулируемого параметра по одноконтурной схеме сигнал первичного преобразователя этого параметра используется как в регулирующем приборе Р–21, так и в дифференциаторе Д–01.
В регулирующем приборе P–21 имеются два входа 0-5 мА (демпфированный и недемпфированный). Недемпфированный вход регулирующего прибора используется, например, для ввода сигнала от дифференциатора. Другой вход 0-5 мА может быть использован либо токовым задатчиком ЗУ05, либо сигналом от первичного преобразователя. Для одновременного включения и преобразователя, и задатчика в схеме использован измерительный блок И–04.
Если в схеме применяется измерительный блок И–04, целесообразно в качестве задатчика использовать задатчик ЗУ–11, что и выполнено на схеме (рис. 4).
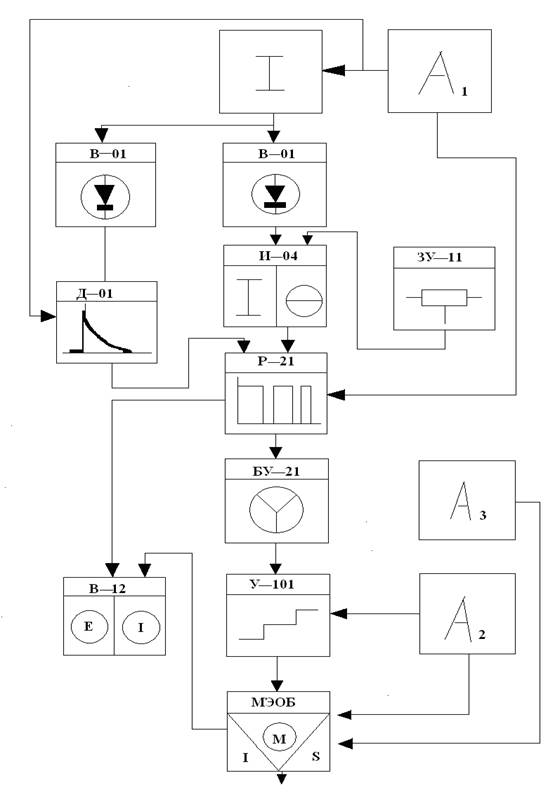
Рис. 4. Структурная схема ПИД – регулятора с регулирующим прибором Р – 21 и
задатчиком ЗУ – 11: I – первичный преобразователь регулируемого
параметра в токовый сигнал 0-5 мА; А1, А2, А3 – автоматы питания
Принципиально эту задачу можно реализовать также следующим образом (рис. 5).
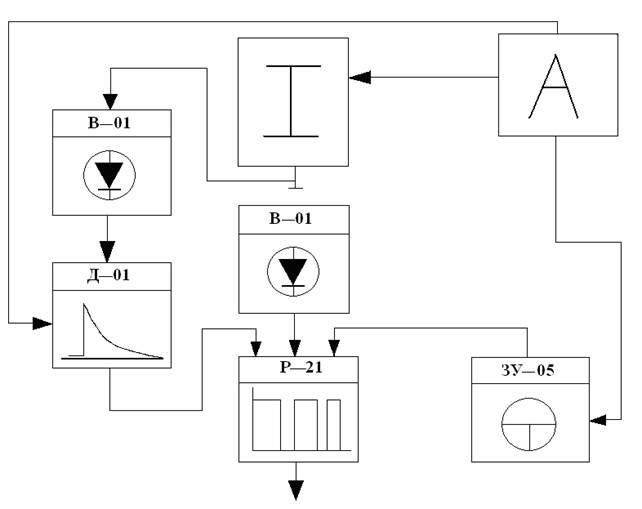
Рис. 5. Часть схемы ПИД – регулятора с регулирующим прибором Р – 21 и
задатчиком ЗУ – 05
2.2. ПИД – регулятор с пневматическим исполнительным механизмом
При построении ПИД–регулятора с пневматическим исполнительным механизмом для преобразования токового сигнала 0-5 мА в давление сжатого воздуха 0,2∙105-1∙105 Па можно применить электропневмопреобразователь типа ЭПП-М, у которого давление на выходе изменяется от 0,2∙105 до 1∙105 Па при изменении сигнала на входе от 0 до 5 мА.
В составе системы ГСП «Каскад» имеется регулирующий прибор P–12 с аналоговым токовым выходом 0-5 мА, который может формировать П, ПИ, ПД и ПИД – законы регулирования. Поэтому, построение ПИД–регулятора с пневматическим исполнительным механизмом целесообразно осуществлять на основе применения этого регулирующего прибора.
С учетом сказанного, структурная схема ПИД–регулятора с пневматическим исполнительным механизмом (например, типа МИМ) может быть представлена в следующих двух вариантах (рис.6 и рис.7), отличающихся только типом используемого задатчика.

Рис. 6. ПИД – регулятор с пневматическим исполнительным механизмом типа МИМ и задатчиком ЗУ – 11
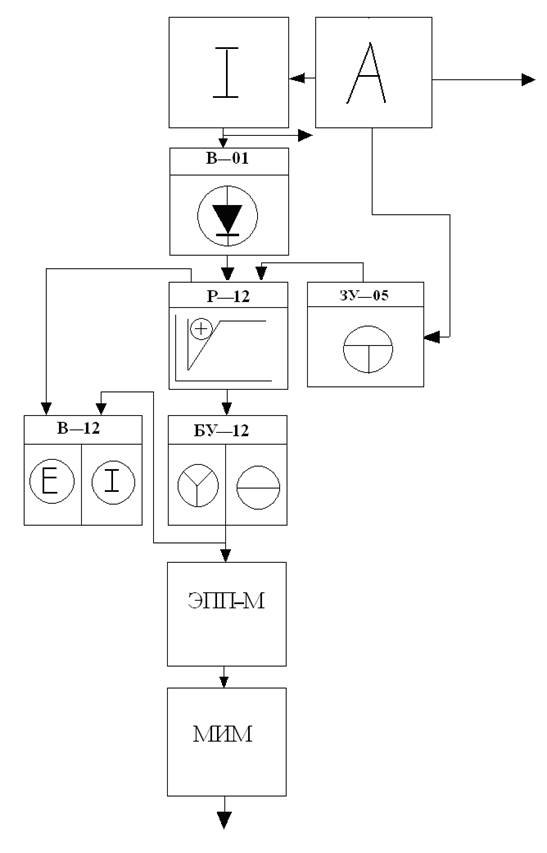
Рис. 7. ПИД – регулятор с пневматическим исполнительным механизмом типа МИМ и задатчиком ЗУ – 05
2.3. ПИД – регулятор с применением в качестве регулирующего органа
Date: 2016-05-23; view: 663; Нарушение авторских прав