Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Вращение тела вокруг неподвижной точки
|
|
Название такого вида движения довольно точно его определяет. Часто это движение называют сферическим движением потому, что все точки тела движутся по сферическим поверхностям.
Наглядным примером такого движения является волчок, закономерности движения которого лежат в основе гироскопических приборов.
1) Углы Эйлера. Уравнения вращения тела с одной неподвижной точкой.
| Рис. 9.5. |
| Рис. 9.5. |
Положение тела определяется следующим образом. Назначаются две системы декартовых осей. Первая система – неподвижные оси x,y,z. Начало которых берётся в неподвижной точке O тела (рис. 16). Вторая система, оси x1, y1, z1, связывается с телом. Поэтому положение тела будет определяться как положение этих осей относительно неподвижных.
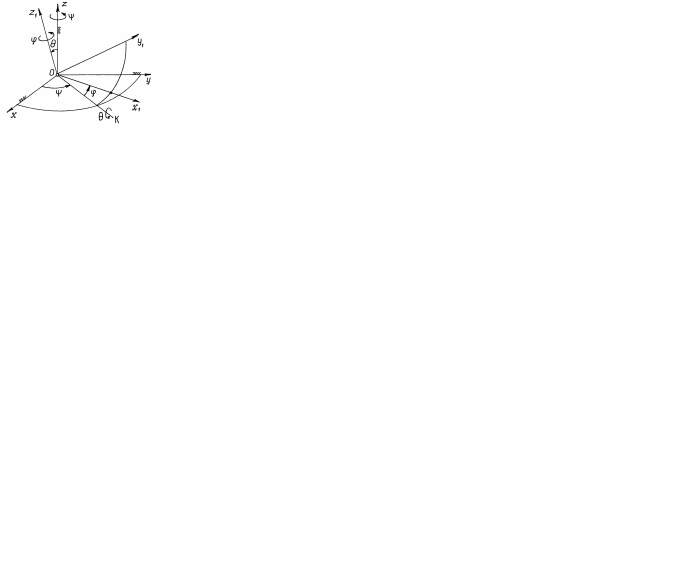
Рис.16
| Рис. 9.4. |
| Рис. 9.5. |
Линия пересечения неподвижной плоскости xOy и подвижной x1Oy1, прямая OK, называется линией узлов. Угол Ψ называется углом прецессии, угол θ – углом нутации, угол φ – углом собственного вращения. Эти названия углов пришли из теории гироскопов.
При движении тела углы Эйлера изменяются по определённым законам Ψ=Ψ(t); θ=θ(t); φ=φ(t) которые называются уравнениями вращения.
На примере вращающегося волчка можно лучше разобраться в этих углах Эйлера (рис.17). Ось волчка z1 описывает конус вокруг неподвижной оси z. Это вращение определяется углом Ψ (говорят: волчок совершает прецессию). Отклонение оси волчка от вертикали – угол нутации θ.
А вращение волчка вокруг своей оси z1, определяемое углом φ – собственное вращение.
Рис.17
2) Теорема Даламбера – Эйлера. Мгновенная ось вращения.
Проведём в теле сферическую поверхность произвольного радиуса с центром в неподвижной точке O (рис.18).
Рис.18
Покажем у тела какие-нибудь две точки A и B, расположенные на этой сфере. Соединим их по сфере дугой наибольшего радиуса (кратчайшее расстояние между точками). Переместим тело в новое положение. Точки, а значит и дуга, займут положение A1 и B1. Соединим точки A и A1, B и B1 дугами большого радиуса AA1 и BB1. Посередине этих дуг проведём им перпендикулярные дуги и найдём их точку пересечения P1. Соединим эту точку P1 с точками A, B, A1, B1. Получим два сферических треугольника ∆ABP1 и ∆A1B1P1, расположенных на этой сфере. Эти два треугольника равны, как треугольники с равными сторонами (AB=A1B1, а AP1=A1P1 и BP1=B1P1 – как дуги равноудалённые от перпендикуляров). Так как эти два треугольника расположены на одной сфере и имеют общую вершину P1, то их можно совместить поворотом сферы, а значит и тела, вокруг прямой OP1.
Поэтому можно сделать вывод, что тело с одной неподвижной точкой можно переместить из одного положения в другое поворотом вокруг некоторой оси, проходящей через неподвижную точку O. Это утверждение – есть теорема Даламбера-Эйлера.
| Рис. 9.7. |
 . Конечно, для каждого другого момента времени эта ось расположена иначе. Поэтому ось P называют мгновенной осью вращения, а угловую скорость – мгновенной угловой скоростью, вектор которой направлен по оси.
. Конечно, для каждого другого момента времени эта ось расположена иначе. Поэтому ось P называют мгновенной осью вращения, а угловую скорость – мгновенной угловой скоростью, вектор которой направлен по оси. | Рис. 9.8. |
3) Скорость точек тела.
По теореме Даламбера-Эйлера за малое время ∆t движение тела можно представить как вращение вокруг неподвижной оси OP1 с некоторой угловой скоростью  (рис.19).
(рис.19).
Рис.19
Тогда скорость точки M:  В пределе, при ∆t→0, угловая скорость будет приближаться к мгновенной угловой скорости , направленной по мгновенной оси вращения P, а скорость точки
В пределе, при ∆t→0, угловая скорость будет приближаться к мгновенной угловой скорости , направленной по мгновенной оси вращения P, а скорость точки  - к истинному значению:
- к истинному значению:

Но таким же образом находится скорость точки при вращении тела вокруг оси, по которой направлен вектор , в нашем случае – по мгновенной оси вращения P. Поэтому скорость точки можно определить как скорость её при вращении тела вокруг мгновенной оси P. Величина скорости v=h∙ω (рис.19).
| Рис. 9.9. |
Пример 2. Водило OA=a, вращаясь вокруг вертикальной оси z с угловой скоростью ω0, заставляет диск радиуса R кататься по горизонтальной плоскости (рис.20).
Рис.20
| Рис. 9.10. |
Так как скорость точки касания диска с плоскостью равна нулю, то мгновенная ось вращения P проходит через эту точку. И вектор мгновенной угловой скорости будет направлен по этой оси.
Точка A вместе с водилом OA вращается вокруг оси z. Поэтому её скорость vA=aω0 (рис.20). Эта скорость определяет направление вращения диска вокруг оси P и направление вектора . Величина угловой скорости  (h – расстояние от A до оси P). Теперь можно найти скорость любой точки диска, рассматривая его движение как вращение вокруг оси P. Так, например, скорость точки B: vB=2h∙ω. Так как h=R∙cosα и
(h – расстояние от A до оси P). Теперь можно найти скорость любой точки диска, рассматривая его движение как вращение вокруг оси P. Так, например, скорость точки B: vB=2h∙ω. Так как h=R∙cosα и  ,
,  , то
, то  и vB=2aω0.
и vB=2aω0.
4) Ускорение точек тела.
Сначала определим угловое ускорение тела  . При движении тела вектор угловой скорости изменяется и по величине, и по направлению. Точка, расположенная на его конце будет двигаться по некоторой траектории со скоростью
. При движении тела вектор угловой скорости изменяется и по величине, и по направлению. Точка, расположенная на его конце будет двигаться по некоторой траектории со скоростью  (рис.21).
(рис.21).
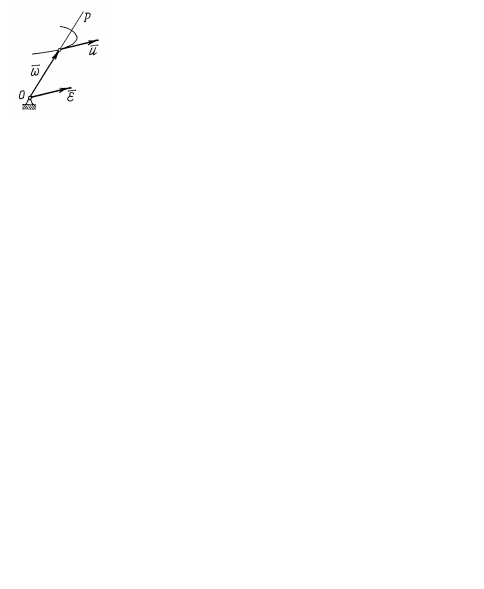
Рис.21
Если рассматривать вектор как радиус-вектор этой точки, то  .
.
Итак. Угловое ускорение тела можно определить как скорость точки, расположенной на конце вектора угловой скорости:
 .
.
Этот результат называется теоремой Резаля.
Теперь обратимся к определению ускорения точек. Ускорение какой-либо точки M тела

есть сумма двух векторов.
Первый вектор  . Модуль его a1=εr∙sinα1=ε∙h1, где h 1 – расстояние от точки M до вектора
. Модуль его a1=εr∙sinα1=ε∙h1, где h 1 – расстояние от точки M до вектора  . Направлен он перпендикулярно и
. Направлен он перпендикулярно и  . Но таким же способом определяется касательное ускорение. Поэтому первую составляющую ускорения определяют как касательное ускорение, предполагая, что тело вращается вокруг оси, совпадающей с вектором . И обозначается этот вектор ускорения так
. Но таким же способом определяется касательное ускорение. Поэтому первую составляющую ускорения определяют как касательное ускорение, предполагая, что тело вращается вокруг оси, совпадающей с вектором . И обозначается этот вектор ускорения так
 .
.
Второй вектор  Модуль его a2=ωv∙cosα2, но α2=90°, т.к. векторы и
Модуль его a2=ωv∙cosα2, но α2=90°, т.к. векторы и  перпендикулярны друг другу.
перпендикулярны друг другу.
Рис.22
Значит a2=ωv=ωh2ω=h2ω2, где h2 – расстояние от точки М до мгновенной оси P, до вектора .
Направлен вектор  перпендикулярно и , т.е. так же как вектор нормального ускорения при вращении вокруг оси P, или вектора . Поэтому этот вектор ускорения и обозначают, соответственно, так:
перпендикулярно и , т.е. так же как вектор нормального ускорения при вращении вокруг оси P, или вектора . Поэтому этот вектор ускорения и обозначают, соответственно, так:

Итак, ускорение точек тела, вращающегося вокруг неподвижной точки, определяется как сумма двух ускорений:

Этот результат называется теоремой Ривальса.
Заметим, что в общем случае векторы и не совпадают и угол между  и
и  не равен 90°, векторы не перпендикулярны друг другу, как это было при вращении тела вокруг неподвижной оси.
не равен 90°, векторы не перпендикулярны друг другу, как это было при вращении тела вокруг неподвижной оси.
Пример 3. Продолжим исследование движения диска (пример 2). Модуль угловой скорости  Значит вектор вместе с осью P, которая всегда проходит через точку касания диска с плоскостью, вращается вокруг оси z и описывает конус. Точка М на конце вектора движется по окружности радиуса r=ω∙cosα с угловой скоростью ω0. Поэтому угловое ускорение диска
Значит вектор вместе с осью P, которая всегда проходит через точку касания диска с плоскостью, вращается вокруг оси z и описывает конус. Точка М на конце вектора движется по окружности радиуса r=ω∙cosα с угловой скоростью ω0. Поэтому угловое ускорение диска 
Откладывается вектор из неподвижной точкиО. Направлен он, как скорость  , перпендикулярно водилу OA, параллельно оси х (рис. 23).
, перпендикулярно водилу OA, параллельно оси х (рис. 23).
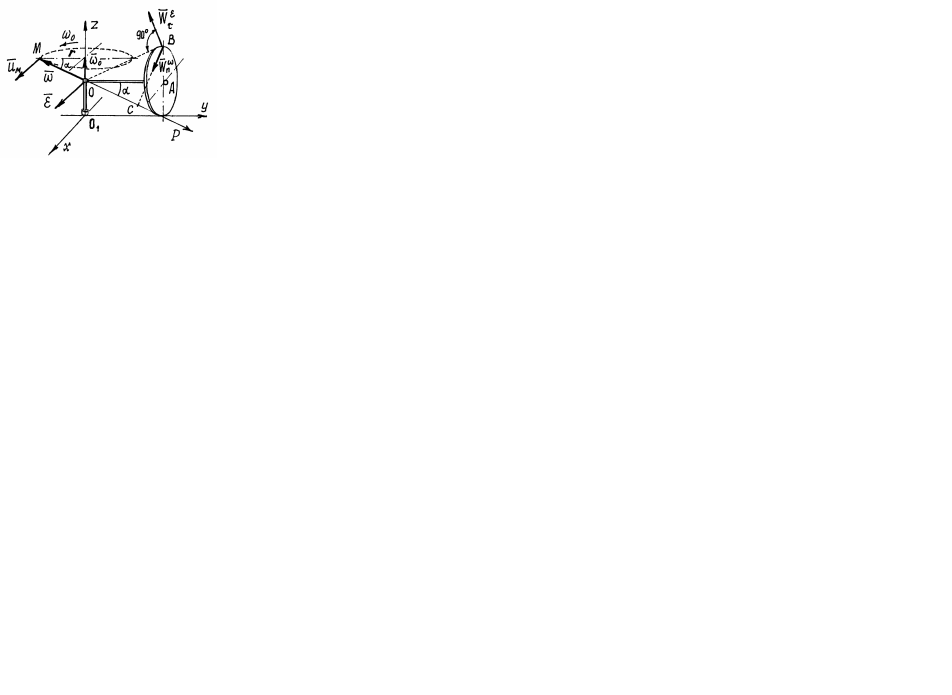
Рис.23
Найдём ускорение точки В.
Ускорение  . Направлен вектор перпендикулярно OB и расположен в плоскости zO1y.
. Направлен вектор перпендикулярно OB и расположен в плоскости zO1y.
Ускорение  Вектор направлен по BC, перпендикулярно мгновенной оси P. Модуль вектора
Вектор направлен по BC, перпендикулярно мгновенной оси P. Модуль вектора  найдём с помощью проекций на оси x, y, z:
найдём с помощью проекций на оси x, y, z:



Значит
Пример 4. Колесо, вращаясь равноускоренно, достигло угловой скорости 20 рад/с через 10 оборотов после начала вращения. Найти угловое ускорение колеса.
Дано: ω=20 рад/с, N=10 об.
Найти: ε-?
Решение. При равномерном вращательном движении имеют место следующие два уравнения: φ=φо+ωоt+εt2/2 и ω= ωо+εt. По условию ωо=0, тогда эти уравнения примут вид: φ=εt2/2 и ω = εt. Решая их и учитывая, что φ=2πN, получим окончательно ε=ω2/4πN=3,2 рад/с.
Пример 5. Колесо радиусом 10 см вращается с постоянным угловым ускорением 3,14 рад/с2 (рис.24). Найти для точек на ободе колеса к концу первой секунды после начала движения: 1) угловую скорость, 2) линейную скорость, 3) тангенциальное ускорение, 4) нормальное ускорение, 5) полное ускорение и 6) угол, составляемый направлением полного ускорения с радиусом колеса.
Дано: R= 0,1 м, ε=3,14 рад/с2
Найти: ω-? v -? aτ -? a -?
Рис.24
Решение. 1) При равнопеременном вращательном движении угловая скорость ω = ωо+εt. По условию ωо=0, тогда ω = εt, т.е. ω растет пропорционально времени. К концу первой секунды ω=3,14 рад/с.
2) Так как v=ωR, то линейная скорость также пропорционально времени. К концу первой секунды v = 3,14 м/с.
3) Тангенциальное ускорение a τ = 𝜀R не зависит от времени t. В нашем случае a τ = 0,314 м/с2.
4) Нормальное ускорение a n=ω2R=ε2t2R, т.е. нормальное ускорение растет пропорционально квадрату времени: при t=1 c a n=0,986м/с2.
5) Полное ускорение растет со временем по закону:  При t=1 c a =1,03 м/с2.
При t=1 c a =1,03 м/с2.
6) Имеем  , где α - угол, составляемый направлением полного ускорения с радиусом колеса. В начальный момент времени, т.е. при t=0, a =a τ - полное ускорение направлено по касательной. При t=∞ a = a n (так как a τ=const и a n пропорционально времени), т.е. при t=∞ полное ускорение направлено по нормали. К концу первой секунды sinα= a τ/ a n=0,314/1,03=0,305, т.е. α=17о46’.
, где α - угол, составляемый направлением полного ускорения с радиусом колеса. В начальный момент времени, т.е. при t=0, a =a τ - полное ускорение направлено по касательной. При t=∞ a = a n (так как a τ=const и a n пропорционально времени), т.е. при t=∞ полное ускорение направлено по нормали. К концу первой секунды sinα= a τ/ a n=0,314/1,03=0,305, т.е. α=17о46’.
Пример 6. Колесо вращается равноускоренно с угловым ускорением ε= 3 рад/с2. Определить, какой угловой скорости достигнет тело после t=3 с своего вращения? Сколько оборотов N оно при этом совершит?
Решение. Если тело вращается равноускоренно, то его движение описывает следующая система уравнений

В начальный момент тело покоилось, значит, ω0=0. Тогда

Следовательно, ω=εt=3∙3=9 рад/с.
Количество оборотов

Пример 7. Вентилятор вращался с частотой n0=900 об/мин. После выключения вентилятор, вращаясь равнозамедленно, сделал до остановки N=75 об. Какое время t прошло с момента выключения до остановки вентилятора? С каким угловым ускорением ε он двигался?
Решение. Равнозамедленное движение вентилятора описывается следующей системой уравнений
Поскольку вентилятор остановился, то его конечная частота n=0. Тогда выразим  из второго уравнения и, подставив его в первое уравнение, а также учитывая, что n0=900 об/мин = 15 об/с, получим
из второго уравнения и, подставив его в первое уравнение, а также учитывая, что n0=900 об/мин = 15 об/с, получим

Время движения равно
Пример 8. Точка вращается по окружности радиусом R=20 см с постоянным тангенциальным ускорением aτ=5 см/с2. Через какое время после начала вращения нормальное ускорение точки будет вдвое больше тангенциального?
Решение. Угловая скорость точки при равноускоренном движении может быть найдена из соотношения ω=ω0+εt. Так как ω0=0, то ω=εt. Нормальное ускорение an=ω2R=(εt)2R. Тангенциальное ускорение aτ=εR. По условию задачи an=2aτ, тогда (εt)2R=2εR, следовательно, εt2=2 и 
Пример 9. Точка движется по окружности радиусом R=2 см. Зависимость пути от времени дается уравнением s(t)=Ct3, где С = 0,1 см/с3. Найти нормальное и тангенциальное ускорения точки в тот момент, когда линейная скорость точки v= 0,3 м/с.
Решение. Зависимость пути от времени позволяет найти зависимости от времени скорости и тангенциального ускорения.

Отсюда,

Тогда тангенциальное ускорение aτ=6∙Ct=6∙0,1∙10-2∙10=0,06 м/с2.
Нормальное ускорение


Пример 10. Точка движется по окружности радиусом R = 4 м. Начальная скорость точки равна 3 м/с, тангенциальное ускорение aτ = 1 м/с2. Для момента времени t = 2 с определить: а) длину пути, пройденного точкой, б) модуль перемещения; в) линейную и угловую скорости; г) нормальное, полное и угловое ускорения.
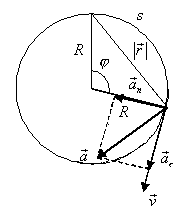
Рис.25
Решение. Уравнение зависимости пути, пройденного точкой, от времени имеет вид  (м). Это позволяет найти длину пути
(м). Это позволяет найти длину пути  м. Если учесть, что за один оборот точка проходит путь, равный длине окружности s1=2πR=8π м, то можно найти угловое перемещение точки из пропорции
м. Если учесть, что за один оборот точка проходит путь, равный длине окружности s1=2πR=8π м, то можно найти угловое перемещение точки из пропорции  , φ=2 (рад) = 114,70. Тогда модуль перемещения может быть найден по теореме косинусов как хорда, стягивающая этот угол φ.
, φ=2 (рад) = 114,70. Тогда модуль перемещения может быть найден по теореме косинусов как хорда, стягивающая этот угол φ.

Линейная скорость точки v=v0+aτt=3+1∙2=5 м/с.
Угловая скорость ω=vR=5∙4=20 рад/с.
Нормальное ускорение
Полное ускорение  Модуль полного ускорения
Модуль полного ускорения

Угловое ускорение
Пример 11. Автомобиль, движущийся со скоростью 36 км/ч, проходит закругленное шоссе с радиусом кривизны 200 м. На повороте шофер тормозит машину, сообщая ей ускорение 0,3 м/с2. Найти нормальное и полное ускорения автомобиля на повороте. Найти угол между вектором полного ускорения автомобиля на повороте и вектором его скорости. Каковы угловые скорость и ускорение автомобиля в момент вхождения машины в поворот?
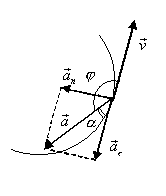
Рис.26
Решение. Зная скорость автомобиля v =36 км/ч =10 м/с, найдем его нормальное ускорение
Полное ускорение автомобиля

Угловое ускорение

Угловая скорость
Поскольку движение автомобиля замедленное, то векторы скорости и тангенциального ускорения направлены в противоположные стороны, поэтому вектор скорости и вектор полного ускорения образуют тупой угол φ. Для нахождения этого угла определим вначале угол α, дополняющий искомый угол до 1800.

Пример 12. Найти радиус R вращающегося колеса, если известно, что линейная скорость v1 точки, лежащей на ободе, в 2,5 раза больше линейной скорости v2, точки, лежащей на расстоянии r =5 cм ближе к оси колеса.
Дано: v2=2,5v1, r=R-5
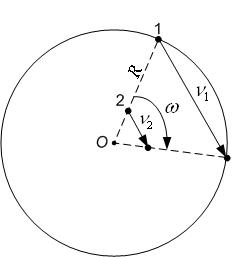
Рис.27
Date: 2015-09-03; view: 957; Нарушение авторских прав