Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Кинематика
|
|
· Положение материальной точки А (рис.1) в пространстве задается радиусом-вектором  (вектор, проведенный из начала координат в данную точку):
(вектор, проведенный из начала координат в данную точку):
 ,
,
где  – единичные векторы направлений; x, y, z – координаты точки.
– единичные векторы направлений; x, y, z – координаты точки.
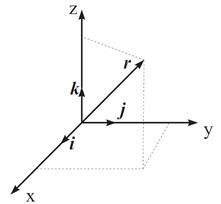
Рис. 1. Декартова система координат
Кинематические уравнения движения в координатной форме:
x = f 1(t), y = f 2(t), z = f 3(t),
где t – время.
· Средняя скорость:
 ,
,
где  – перемещение материальной точки за интервал времени Δ t.
– перемещение материальной точки за интервал времени Δ t.
В Международной системе (СИ) единицей расстояния является метр, единицей времени – секунда; поэтому скорость выражается в метрах в секунду (м/с).
Средняя путевая скорость:
 ,
,
где Δ s – путь, пройденный точкой за интервал времени Δ t. Путь Δ s в отличие от разности координат Δ х = х 2 – х 1 не может убывать и принимать отрицательные значения, т.е. Δ s ≥ 0.
Мгновенная скорость:
 ,
,
где  ;
;  ;
;  – проекции скорости υ на оси координат.
– проекции скорости υ на оси координат.
Модуль скорости:
 .
.
· Ускорение
 ,
,
где  ;
;  ;
;  – проекции ускорения а на оси координат; единица измерения ускорения метр на секунду в квадрате (м/с2).
– проекции ускорения а на оси координат; единица измерения ускорения метр на секунду в квадрате (м/с2).
Модуль ускорения:
 .
.
При криволинейном движении (рис. 2) ускорение можно представить как сумму нормальной а n и тангенциальной аτ составляющих:
 .
.
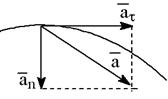
Рис. 2. Криволинейное движение точки (тела)
Модули этих ускорений:
 ;
;  ;
;  .
.
где R – радиус кривизны в данной точке траектории.
· Кинематические уравнения прямолинейного равномерного движения (υ = const):
1) в векторной форме
 ,
,
где  – радиус-вектор, определяющий положение материальной точки в момент времени t;
– радиус-вектор, определяющий положение материальной точки в момент времени t;  – радиус-вектор, определяющий положение точки в начальный момент времени (t = 0);
– радиус-вектор, определяющий положение точки в начальный момент времени (t = 0);
2) в координатной форме (в проекции на координатные оси Оx, Oy, Oz)
x (t) = x 0 + υxt; y (t) = y 0 + υyt; z (t) = z 0 + υzt,
x 0, y 0, z 0 – начальные координаты; υ x, υ y, υ z – проекции скорости на координатные оси.
· Кинематические уравнения прямолинейного равноускоренного движения (a = const):
1) в векторной форме
 ,
,
где  – начальная скорость (скорость материальной точки в момент времени t = 0);
– начальная скорость (скорость материальной точки в момент времени t = 0);
2) в координатной форме
 ;
;  ;
;  ,
,
где υ 0x, υ 0y, υ 0z – проекции начальной скорости на координатные оси; a x, a y, a z – проекции ускорения.
· Скорость точки при равноускоренном движении:
1) в векторной форме
 ;
;
2) в координатной форме
 ;
;  ;
;  .
.
· Средняя угловая скорость:
 ,
,
где Δ φ – угловое перемещение за время Δ t; единица измерения угловой скорости радиан на секунду (рад/с).
· Мгновенная угловая скорость:
 ,
,
в проекции на ось вращения
 .
.
· Угловое ускорение
 ,
,
в проекции на ось вращения
 ,
,
единица измерения углового ускорения радиан на секунду в квадрате (рад/с2).
· Кинематическое уравнение равномерного (ω = const) вращения в проекции на ось вращения:
 ,
,
где φ 0 – начальное угловое ускорение.
· Частота вращения
 или
или  ,
,
где N – число оборотов, совершаемое телом за время t; T – период вращения (время одного полного оборота); единица измерения частоты секунда в минус первой степени (с-1).
Угловое перемещение φ и угловое ускорение ω связаны с числом оборотов, частотой вращения и периодом вращения соотношением:
 ;
;  ;
;  .
.
· Кинематическое уравнение равноускоренного вращения в проекции на ось вращения:
 ,
,
где ω 0 – начальная угловая скорость.
Угловая скорость при равноускоренном вращении
 .
.
Число оборотов N связано со средней частотой  вращения соотношением:
вращения соотношением:

При равноускоренном вращении есть полусумма начальной n 0 и конечной n мгновенными частотами вращения:
 .
.
· Связь между линейными и угловыми величинами, характеризующими вращение материальной точки, выражается следующими формулами:
 ,
,
где φ – угол поворота тела; s – путь, пройденный точкой по дуге окружности радиуса R.
Скорость точки (линейная)
 ;
;  ;
;
ускорение точки
 ;
;  (тангенциальное);
(тангенциальное);
 (нормальное).
(нормальное).
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
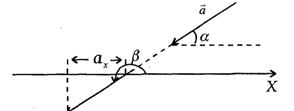
Пример 1. Определить проекцию вектора  на ось ОХ, полагая, что угол α задан (рис. 3 а,б).
на ось ОХ, полагая, что угол α задан (рис. 3 а,б).
Решение: Опустим перпендикуляры с концов вектора на ось ОХ. Проекция вектора на ось ОХ равна
 .
.
Угол β отсчитывается от положительного направления оси ОХ до вектора против часовой стрелки, причем вектор нужно перенести параллельно самому себе так, чтобы его начало лежало на оси ОХ (рис. 3б).

|
|
| Рис. 3а Рис. 3б |
Пример 2. Вертолет начал снижаться с ускорением 0,2 м/с2. Лопасть винта вертолета имеет длину 5 м и совершает 300 об/мин. Определите число оборотов лопасти за время снижения вертолета на 40 м, линейную скорость и центростремительное ускорение.
Решение: Искомое число оборотов лопасти винта совершают за время, равное времени снижения вертолета. Уравнение движения вертолета:  следовательно, время снижения:
следовательно, время снижения:  , а число оборотов:
, а число оборотов:  оборотов.
оборотов.
Линейная скорость концов лопасти винта:  м/с.
м/с.
Центростремительное ускорение конца лопасти:
 м/с2.
м/с2.
Пример 3. Вал начинает вращаться и в первые t = 10 с совершает N = 50 оборотов. Считая вращение вала равноускоренным, определить угловое ускорение и конечную угловую скорость.
Решение: Поскольку начальная угловая скорость равна нулю, уравнение движения и формула угловой скорости:
 ,
,  .
.
Так как угловое перемещение за один полный оборот равно 2π, то полное угловое перемещение вала, соответствующее N оборотам, φ = 2πN. Подставив это выражение в уравнение движения, получим  ,
,
откуда
 рад/с2.
рад/с2.
Date: 2015-08-15; view: 780; Нарушение авторских прав