Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Динамическое торможение .
|
|
Описание процесса торможения.
При выполнении динамического торможения размыкаем контакты контактора Q1 (обмотку статора отключаем от трехфазной сети) и замыкаем контакты контактора Q2 (подключаем два линейных

|
Рис. 4.3.
провода к источнику постоянного напряжения UТ), (рис. 4.3.). Тормозной момент MТ будет зависеть от величины тока IТ.
Чтобы использовать естественную характеристику асинхронной машины, у которой известен максимальный момент MMAX, необходимо создать тормозящее магнитное поле, равное вращающемуся магнитному полю при работе машины в двигательном режиме. При этом должны быть одинаковы модули магнитных потоков (ФТ = ФРЕЗ):
ФТ – неподвижного потока в режиме динамического торможения и
ФРЕЗ – потока вращающегося магнитного поля.
|
|
Рис. 4.4.
Рис. 4.5.
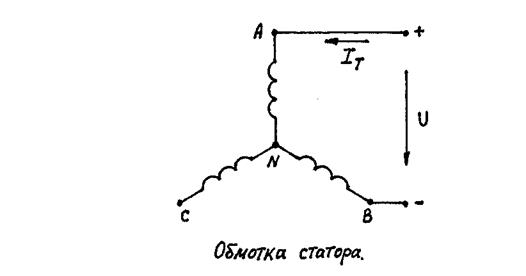
В зависимости от схемы включения обмоток статора асинхронной машины требуется разной величины ток IТ. Значение IТ можно получить, анализируя параметры магнитного поля, создаваемого обмоткой статора для любой схемы включения фазных катушек.
При подключении источника постоянного напряжения как показано на рис. 4.4. (при соединении обмоток статора в звезду) IТ = 0.86∙IM.
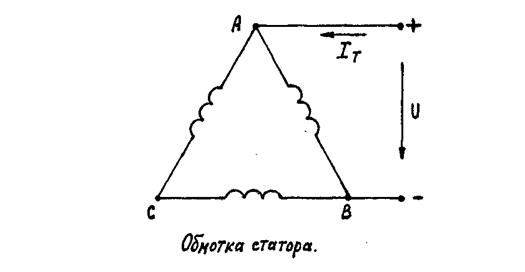
Для схемы подключения, соответствующей рис. 4.5. (при соединении обмоток статора в треугольник), IТ = 1.5∙IM.
Здесь IM – амплитудное значение тока в обмотке статора при работе АД в двигательном режиме.
Чтобы представить вид характеристики n(M) асинхронного двигателя при динамическом торможении (2 квадрант, рис. 4.6.) достаточно характеристику n(M) двигателя при генераторном торможении, рассмотренную ранее (рис. 4.2.), сместить вниз на величину n0. Полученная характеристика будет проходить через начало координат графика n(M).

|
Рис. 4.6.
Расчет характеристики n(M) при динамическом торможении.
Задача ставится следующим образом: требуется рассчитать и построить реостатную характеристику n(M), соответствующую динамическому торможению и проходящую через точку с координатами МТ и nТ.
Расчет этой характеристики n(M) проводим в два этапа:
- расчет характеристики при R2 ДОБ = 0;
- расчет реостатной характеристики при R2 ДОБ ≠ 0, проходящей через расчетную точку с координатами МТ и nТ.
Расчет характеристики nТ(MТ) при R2 ДОБ = 0.
Рассмотрим первый этап - расчет характеристики при R2 ДОБ = 0. Расчет удобно проводить, используя характеристику генераторного торможения.
Определяем тормозной момент МТ = t∙МН и коэффициент нагрузки λТ = MMAX / MТ.
Критическое скольжение при генераторном торможении на естественной характеристике (R2 ДОБ = 0) равно по модулю критическому скольжению при работе машины в двигательном режиме
sКР ГЕН Е = - sКР ДВИГ Е.
Скольжение и частота вращения, соответствующие генераторному торможению на естественной характеристике при МТ, равны
sТ ГЕН Е = sКР ГЕН Е / (λТ +  ,
,
nТ ГЕН Е = n0(1 – sТ ГЕН Е).
При динамическом торможении и известном моменте МТ
nТ ДИН Е = nТ ГЕН Е – n0 = - n0 sТ ГЕН Е.
Для расчета характеристики n(M), соответствующей динамическому торможению (при R2 ДОБ = 0), задаемся рядом значений sТ ГЕН Е
(от 0 до -1), рассчитываем соответствующие значения
nТ ДИН Е = - n0 sТ ГЕН Е
и МТ = 2∙MMAX / (sТ ГЕН Е/sКР ГЕН Е + sКР ГЕН Е/sТ ГЕН Е).
Результаты расчета записываем в таблицу 4.3..
Таблица 4.3.
| sТ ГЕН Е | - | … | sГЕН Н | … | sГЕН КР | … | - 1 | |
| nТ ДИН Е | об/мин | |||||||
| MТ | Н∙м |
Расчет характеристики nТ(MТ) при R2 ДОБ ≠ 0.
Переходим ко второму этапу – расчету реостатной характеристики n(M), соответствующей динамическому торможению и проходящей через точку МТ и nТ ДИН.
Определяем величину добавочного сопротивления R2 ДОБ, которое необходимо включить в цепь ротора, чтобы получить реостатную характеристику n(M), проходящую через точку МТ и nТ ДИН,
R2 ДОБ = (nТ ДИН/nТ ДИН Е - 1)∙R2.
Проведем промежуточные преобразования:
sТ ГЕН = (n0 – (nТ ДИН + n0)) / n0 = - nТ ДИН / n0,
sКР Т ГЕН = sТ ГЕН∙(λТ +  ),
),
nКР Т ГЕН = n0∙(1- sКР Т ГЕН),
nКР Т ДИН = nКР Т ГЕН – n0 = - n0∙sКР Т ГЕН.
Далее рассчитываем реостатную характеристику nТ ДИН(MТ), соответствующую динамическому торможению (при R2 ДОБ ≠ 0). Задаемся рядом значений (7-8 точек) sТ ГЕН (от 0 до -1) и вычисляем соответствующие nТ ДИН и MТ, заносим их в таблицу 4.4..
Последовательность расчета
nТ ГЕН = n0∙(1- sТ ГЕН),
nТ ДИН = - n0∙sТ ГЕН,
MТ = 2∙MMAX / (sТ ГЕН/sТ КР ГЕН + sТ КР ГЕН/sТ ГЕН).
Таблица 4.4.
| sТ ГЕН | - | … | sГЕН Н | … | sГЕН КР | … | - 1 | |
| nТ ДИН | об/мин | |||||||
| MТ | Н∙м |
Затем на одном графике строим две характеристики динамического торможения: nТ ДИН Е(MТ) при R2 ДОБ = 0 (табл. 4.3.) и
nТ ДИН(MТ) при R2 ДОБ ≠ 0 (табл. 4.4.).
На построенных характеристиках n(M) показать расчетные точки, соответствующие моментам МТ и МD.
Далее необходимо указать преимущества и недостатки рассмотренного метода торможения и сделать выводы о целесообразности его применения и в каких случаях.
Date: 2016-07-22; view: 649; Нарушение авторских прав