Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Розділ 15. Цифрові методи передачі неперервних сигналів
|
|
15.1. ПРИНЦИПИ ЦИФРОВОЇ ПЕРЕДАЧІ НЕПЕРЕРВНИХ СИГНАЛІВ
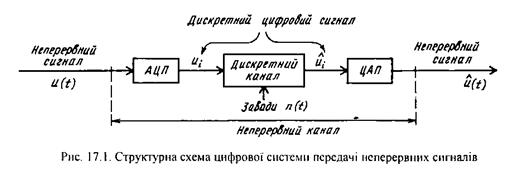 |
Передавання неперервних сигналів дискретним каналом у вигляді послідовності дискретних символів того чи іншого алфавіту дістала назву цифрової передачі неперервних сигналів. Для організації цифрової системи передачі неперервний (аналоговий) сигнал перетворюється в цифровий за допомогою аналого-цифрового перетворювача (АЦП) на передавальній стороні, а на приймальній стороні здійснюється зворотне перетворення цифрового сигналу в аналоговий цифроаналоговим перетворювачем (ЦАП). Отже, на відміну від передавання аналогового сигналу неперервним каналом до цифрової системи передачі мають бути включені АЦП та ЦАП (рис. 17.1 у Отриманий на виході АЦП дискретний цифровий сигнал передається дискретним каналом, як будь-який дискретний первинний сигнал. Дискретний канал, як правило (див. § 1.1), містить кодер, модулятор, лінію зв'язку, демодулятор, декодер; у ньому можуть бути також передбачені засоби підвищення завадостійкості. На приймальній стороні з прийнятого дискретного сигналу
 ЦАП відновлює (з деякою похибкою) неперервний сигнал
ЦАП відновлює (з деякою похибкою) неперервний сигнал  .
.
Аналогові способи передачі повідомлень і відповідних їм первинних сигналів, зокрема розмовних, звукового мовлення, телебачення, нині досягли дуже високого рівня. Але подальше підвищення якості передавання неперервних сигналів практично неможливе. Саме ця обставина і змусила на сучасному етапі розвитку зв'язку переходити до цифрової техніки.
Цифрові системи передачі (ЦСП) характеризуються окремими, тільки їм властивими рисами. Розглянемо основні переваги цих систем над аналоговими.
1. Більш висока завадостійкість дає можливість значно знижувати вимоги до перехідних впливів, власного шуму та стабільності параметрів ліній передачі. Як відомо з розд. 16, аналогові види модуляції можуть забезпечити високу якість, якщо відношення сигнал-завада на вході демодулятора вище за деякий мінімальний (пороговий) рівень. Дискретні ж сигнали можна приймати з високою якістю  при будь-якому відношенні сигнал-завада на вході демодулятора, навіть значно меншому за одиницю. Поріг завадостійкості при цьому не спостерігається.
при будь-якому відношенні сигнал-завада на вході демодулятора, навіть значно меншому за одиницю. Поріг завадостійкості при цьому не спостерігається.
Найбільш яскраво переваги ЦСП виявляються в системах зв'язку з багаторазовою ретрансляцією (переприймання) внаслідок великого ослаблення в лініях зв'язку (див. § 8.1). Типовими прикладами систем такого типу є кабельні, радіорелейні лінії значної довжини. У них через деяку відстань встановлюються ретранслятори, що забезпечують надійність зв'язку. В реальних системах число ретрансляторів може досягати сотень, а інколи й тисяч.
Для аналогових систем передачі ретранслятори являють собою лінійні підсилювачі, що підсилюють не тільки прийнятий сигнал, але й адитивну заваду. Під час проходження через ланцюжок  звичайно ідентичних ретрансляторів-підсилювачів завада підсилюється в разів. Тому має місце ефект накопичення завад. Для досягнення необхідної якості слід забезпечити на вході кожного ретранслятора відношення сигнал-завада в разів більше, ніж у разі передавання без ретрансляції, тобто необхідно підвищити потужність сигналу в разів при існуючих у лініях зв'язку завадах.
звичайно ідентичних ретрансляторів-підсилювачів завада підсилюється в разів. Тому має місце ефект накопичення завад. Для досягнення необхідної якості слід забезпечити на вході кожного ретранслятора відношення сигнал-завада в разів більше, ніж у разі передавання без ретрансляції, тобто необхідно підвищити потужність сигналу в разів при існуючих у лініях зв'язку завадах.
У цифрових системах передачі для усунення ефекту накопичення завад у ретрансляторах переприймальних пунктів здійснюється повна регенерація дискретних первинних сигналів, тобто демодуляція з відновленням форми кодових символів, що передаються, та повторна модуляція. При цьому адитивна завада зі входу ретранслятора не проходить на його вихід, але вона призводить до помилок під час демодуляції. Помилково прийняті в якомусь регенераторі символи в тому самому вигляді передаються на наступні регенератори, тобто має місце ефект накопичення помилок, але для компенсації підвищення ймовірності помилки в разів не потрібно відповідно підвищувати потужність сигналу в разів. Для більшості практичних випадків досить підвищення в півтора-два рази. Крім того, якщо використовувати коректуючі коди, виправлення помилок можливе і без підвищення потужності сигналу.
2. В апаратурі ЦСП є можливість широкого застосування новітньої елементної бази цифрової обчислювальної техніки та мікропроцесорів. Тенденція до освоєння все більш складних структур у вигляді великих інтегральних мікросхем (ВІС) призводить до того, що апаратура ЦСП у більшості випадків є простішою, ніж апаратура аналогових систем передачі, особливо для багатоканального електрозв'язку з частотним розподілом каналів. Так, нині вже випускають АЦП та ЦАП у вигляді окремих мікросхем. Той факт, що ЦСП можна виготовляти на ВІС, дозволяє забезпечити високу надійність апаратури, зменшити її габаритні розміри, масу, а також виробничі та експлуатаційні витрати.
3. Із впровадженням ЦСП з'явились умови для об'єднання різних видів зв'язку на цифровій основі (передача даних, мови, телебачення тощо) та інтеграції апаратури систем передачі і систем комутації. Простота спряження цифрового каналу та систем комутації з ЕОМ дозволяє істотно розширити сферу застосування обчислювальної техніки для побудови апаратури зв'язку та автоматичних систем керування мережами зв'язку.
Основним недоліком ЦСП є ширша смуга частот, ніж в аналогових системах. Проте ця особливість ЦСП дає змогу використовувати лінійні тракти низької якості (з малим перехідним ослабленням, великим коефіцієнтом відбиття тощо), оскільки смуга частот вигідно обмінюється на відношення сигнал-завада. Типовими прикладами ЦСП неперервних первинних сигналів є системи з імпульсно-кодовою модуляцією (ІКМ) та дельта-модуляцією (ДМ) з їх модифікаціями, яких нині нараховується кілька десятків (особливо ДМ).
15.2. ІМПУЛЬСНО-КОДОВА МОДУЛЯЦІЯ ТА ЇЇ ОСОБЛИВОСТІ
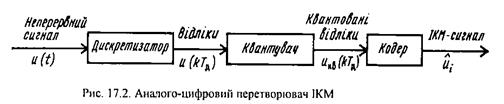 |
Аналого-цифрове перетворення при ІКМ. Принципи аналого-цифрового перетворення на основі ІКМ були запропоновані в 1940 р. французьким інженером Рівсом. В ІКМ аналоговий первинний сигнал перетворюється в цифровий за допомогою трьох операцій: дискретизації за часом, квантування за амплітудою (рівнем) та кодування. Таким чином, АЦП ІКМ має містити дискретизатор, квантувач та кодуючий пристрій (рис. 17.2). Робота такої схеми ілюструється графіками, наведеними нарис. 17.3.
Процес дискретизації неперервного сигналу зводиться до визначення його відліків  через інтервал часу
через інтервал часу  (рис. 17.3, а) і докладно розглядався в § 2.4. Для визначення відліків можна застосовувати електронний ключ, який через інтервал замикається на короткий час. Згідно з теоремою Котельникова частота дискретизації
(рис. 17.3, а) і докладно розглядався в § 2.4. Для визначення відліків можна застосовувати електронний ключ, який через інтервал замикається на короткий час. Згідно з теоремою Котельникова частота дискретизації  має бути більшою за подвоєну максимальну частоту спектра неперервного сигналу. Так, для розмовного сигналу зі спектром 0,3-3,4 кГц застосовується частота
має бути більшою за подвоєну максимальну частоту спектра неперервного сигналу. Так, для розмовного сигналу зі спектром 0,3-3,4 кГц застосовується частота  .
.
У квантувачі встановлюються дозволені для передавання рівні. Різницю між двома найближчими (сусідніми) рівнями називають кроком квантування Д,. Якщо кроки квантування однакові й не залежать від рівня квантування (рис. 17.3, б), то квантування є рівномірним. Якщо ж кроки квантування різні  , то маємо нерівномірне квантування.
, то маємо нерівномірне квантування.
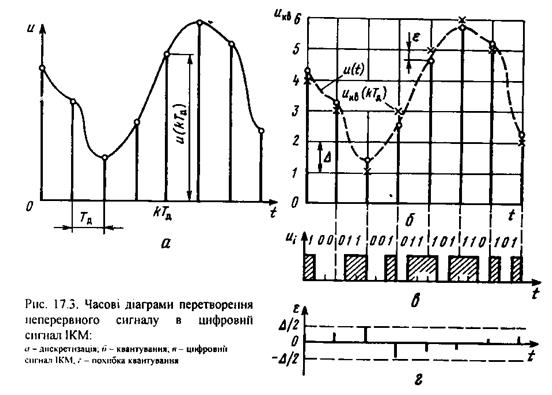 |
При квантуванні відліки неперервного сигналу , що мають значення в інтервалі між дозволеними рівнями, округлюються до найближчого дозволеного рівня. На рис. 17.3, б квантовані відліки  позначені хрестиками. Через округлення в процесі квантування виникає похибка
позначені хрестиками. Через округлення в процесі квантування виникає похибка
 , (1 7. 1)
, (1 7. 1)
 оскільки квантоване значення відліку відрізняється від первинного . Ця похибка є специфічною завадою в будь-якому АЦП і дістала назву шуму квантування. Шум квантування
оскільки квантоване значення відліку відрізняється від первинного . Ця похибка є специфічною завадою в будь-якому АЦП і дістала назву шуму квантування. Шум квантування  являє собою випадкову послідовність імпульсів (рис. 17.3, г), максимальне значення яких не перевищує півкроку квантування.
являє собою випадкову послідовність імпульсів (рис. 17.3, г), максимальне значення яких не перевищує півкроку квантування.
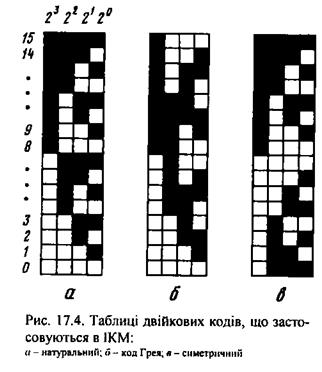
Квантований сигнал вже взагалі можна вважати кодованим з обсягом коду от, що дорівнює числу дозволених рівнів квантування. Проте багаторівневі сигнали досить незручні для передавання, оскільки у приймачі необхідно впевнено відрізняти всі рівні. Крім того, такі сигнали важко регенерувати в разі дії завад. Тому в системах з ІКМ звичайно застосовують двійковий код. Кодер АЦП перетворює квантовані відліки в кодові комбінації, якими кодуються відповідні рівні (рис. 17.3, в). Найчастіше кодування зводиться до запису номера рівня у двійковій системі числення. Це буде натуральний двійковий код. У системах зв'язку з ІКМ застосовують й інші двійкові коди (наприклад, Грея чи симетричний), які надають більшої захищеності системам ІКМ від помилок. Таблиці цих кодів для 16 рівнів квантування подано на рис. 17.4. Затемнені ділянки на рисунку — це 1 (одиниці), а світлі — 0 (нулі) у кодових комбінаціях. У практичних системах з ІКМ старший розряд кодових комбінацій, як правило, указує полярність (знак) відліків (в ІКМ прийнято: 1 - додатна, 0 - від'ємна полярність). За відомими значеннями відліків і кроком квантування за допомогою таблиці коду можна досить легко знайти необхідні номери рівнів квантування та кодові комбінації на виході АЦП для ІКМ.
Цифроаналогове перетворення при ІКМ. Зворотне перетворення цифрового сигналу в неперервний при ІКМ здійснюється декодером та ФНЧ (рис. 17.5). До складу декодера входить перетворювач послідовного коду в паралельний, на виході якого з'являється набір одиниць та нулів прийнятої кодової комбінації. Кожна одиниця (імпульс струму) надходить до входу підсумовувача з вагою  , де
, де  - номер розряду одиниці в кодовій комбінації для натурального двійкового коду. На виході підсумовувача виникає імпульс струму, амплітуда якого визначається кодовою комбінацією на вході декодера. Так, при декодуванні кодової комбінації 01101 з 2-го та 5-го виходів перетворювача до входу суматора напруга (струм) не надходить (нульові імпульси), аз 1-, 3- та 4-го надходять імпульси напруги (струму), які збільшуються відповідно у 20, 22, 23 рази. На виході суматора з'являється напруга, пропорційна 23 + 22 + 20 = 13-му рівню,
- номер розряду одиниці в кодовій комбінації для натурального двійкового коду. На виході підсумовувача виникає імпульс струму, амплітуда якого визначається кодовою комбінацією на вході декодера. Так, при декодуванні кодової комбінації 01101 з 2-го та 5-го виходів перетворювача до входу суматора напруга (струм) не надходить (нульові імпульси), аз 1-, 3- та 4-го надходять імпульси напруги (струму), які збільшуються відповідно у 20, 22, 23 рази. На виході суматора з'являється напруга, пропорційна 23 + 22 + 20 = 13-му рівню,
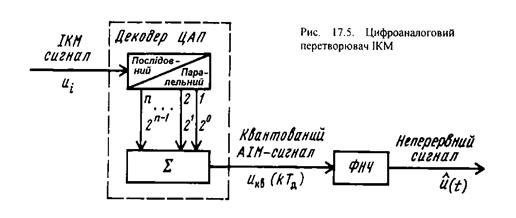 |
тобто квантований АІМ-сигнал.
Відновлення з АІМ-сигналу неперервного первинного сигналу  еквівалентне детектуванню АІМ (див. § 15.5) і здійснюється ФНЧ.
еквівалентне детектуванню АІМ (див. § 15.5) і здійснюється ФНЧ.
Завадостійкість ІКМ. Числовою мірою завадостійкості передавання неперервного сигналу цифровими методами є середньоквадратична похибка, що визначається формулою (16.2) між та , або відношення сигнал-шум на виході ЦАП. Причинами, які призводять до відміни прийнятого сигналу від переданого для ІКМ, є: 1) шум квантування, що виникає через округлення відліків до найближчого дозволеного рівня; 2) завади в каналі, через які виникають помилки під час демодуляції символів кодових комбінацій.
Шум квантування виникає в АЦП і не пов'язаний із завадами в каналі. Середня потужність шуму квантування  (на опорі
(на опорі  ) знаходиться як дисперсія випадкової похибки округлення ) за формулою (17.1). У більшості випадків можна вважати, що похибка квантування має рівномірний розподіл імовірності з густиною
) знаходиться як дисперсія випадкової похибки округлення ) за формулою (17.1). У більшості випадків можна вважати, що похибка квантування має рівномірний розподіл імовірності з густиною
Тоді, використовуючи вираз (2.21), дістаємо значення середньої потужності (дисперсії) шуму квантування
 . (17.2)
. (17.2)
Відношення середньої потужності сигналу та шуму квантування з врахуванням коефіцієнта амплітуди сигналу, що визначається за формулою
(2.37),
 , (17.3)
, (17.3)
де  - максимальне значення сигналу . Якщо врахувати співвідношення між кроком квантування
- максимальне значення сигналу . Якщо врахувати співвідношення між кроком квантування  та числом рівнів
та числом рівнів  для симетричного сигналу, для якого
для симетричного сигналу, для якого  , то
, то
 . (1 7.4)
. (1 7.4)
Якщо підставити формулу (17.4) у співвідношення (17.3), можна дістати
 , (17.5)
, (17.5)
де  - число розрядів (довжина) кодових комбінацій двійкового коду (число символів коду на відлік).
- число розрядів (довжина) кодових комбінацій двійкового коду (число символів коду на відлік).
З формул (17.3) - (17.5) випливає, що шум квантування визначається кроком квантування або числом рівнів квантування . Відношення сигнал-шум квантування можна зробити бажаного значення, якщо використати необхідне число рівнів квантування і, відповідно, довжину коду .
Важливою особливістю шуму квантування, яка істотно відрізняє його від адитивного шуму, є те, що він має місце тільки при наявності сигналу . Нема сигналу - нема і шуму квантування. Отже, цей шум можна розглядати як нелінійні спотворення сигналу, що виникають при квантуванні, тому він не змінюється при ретрансляції сигналів і не накопичується в каналі зв'язку.
Помилки символів кодових комбінацій через завади в каналі зв'язку, якщо не передбачені заходи їх виправлення, призводять до помилкового декодування в ЦАП усієї кодової комбінації. Це означає, що переданий квантований відлік на виході декодера ЦАП замінюється якимось іншим відліком (і не обов'язково найближчим за рівнем). Похибка відновлення відліків, що виникає при цьому, названа шумом хибних імпульсів. Ця похибка залежить від того, які із символів кодової комбінації є помилковими, тобто похибка залежить від місця помилки. Якщо в ІКМ застосовується натуральний двійковий код, то помилка в першому (молодшому) розряді кодової комбінації спричинює похибку, що дорівнює кроку квантування , помилка в -му розряді призводить до появи у вихідному сигналі похибки  . Множник є ваговою функцією при обчисленні потужності хибних імпульсів.
. Множник є ваговою функцією при обчисленні потужності хибних імпульсів.
Отже, шум хибних імпульсів залежить від імовірності помилок символів кодових комбінацій  та їх ваги. Імовірність помилок є функцією відношення сигнал-завада в каналі, методу приймання та виду модуляції (див. § 14.3). Малий шум хибних імпульсів
та їх ваги. Імовірність помилок є функцією відношення сигнал-завада в каналі, методу приймання та виду модуляції (див. § 14.3). Малий шум хибних імпульсів  відчувається, наприклад, у телефонному каналі як рідкі окремі тріски, цей шум набагато менший за шум квантування і його можна не враховувати при визначенні якісних показників передавання. Якщо
відчувається, наприклад, у телефонному каналі як рідкі окремі тріски, цей шум набагато менший за шум квантування і його можна не враховувати при визначенні якісних показників передавання. Якщо  , тріски все частіші і відчуваються вже як суцільний шумовий фон, порівнянний із шумом квантування.
, тріски все частіші і відчуваються вже як суцільний шумовий фон, порівнянний із шумом квантування.
Методи підвищення завадостійкості ІКМ. Одним із найпростіших методів зменшення шуму квантування є збільшення числа рівнів квантування (відповідно зменшується крок квантування), але при цьому зростає довжина кодових комбінацій і розширюється спектр ІКМ-сигналу. Так, збільшення числа рівнів у два рази призводить до збільшення ширини спектра у  разів. Із цього випливає, що в системі з ІКМ, як і в інших завадостійких системах модуляції, наприклад ЧМ, відбувається "заміна" відношення сигнал-завада на смугу частот. Проте, оскільки смуга частот розширюється за логарифмічним законом, а відношення сигнал-шум квантування зростає за показниковим законом, у системі з ІКМ ця "заміна" здійснюється значно ефективніше, ніж у системах з аналоговою модуляцією. За цим показником нині не існує модуляції, кращої за ІКМ.
разів. Із цього випливає, що в системі з ІКМ, як і в інших завадостійких системах модуляції, наприклад ЧМ, відбувається "заміна" відношення сигнал-завада на смугу частот. Проте, оскільки смуга частот розширюється за логарифмічним законом, а відношення сигнал-шум квантування зростає за показниковим законом, у системі з ІКМ ця "заміна" здійснюється значно ефективніше, ніж у системах з аналоговою модуляцією. За цим показником нині не існує модуляції, кращої за ІКМ.
Вплив шуму квантування можна також зменшити, якщо застосувати нерівномірний крок квантування. Малі рівні сигналу квантуються з малим кроком, зі зростанням рівня сигналу збільшується відповідно й крок. Таке квантування дає можливість при тому самому числі рівнів квантування передавати слабкі сигнали з меншою похибкою. У цілому при нерівномірному квантуванні шум квантування в середньому буде мати меншу потужність, оскільки малі рівні сигналу мають більшу ймовірність.
Технічно нерівномірне квантування виконується при сполученні компандування сигналу та квантувача з рівномірним кроком. Під компандуванням розуміють стиснення динамічного діапазону сигналів під час передавання та розширення під час приймання: компадерна система являє собою комплекс із двох нелінійних перетворювачів із взаємно оберненими амплітудними характеристиками - компресора і експандера.
Компресор встановлюється на передавальній стороні. Він являє собою пристрій із нелінійною амплітудною характеристикою, яку називають характеристикою компресії (крива 1 на рис. 17.6). У компресорі слабкі сигнали (малого рівня) передаються більшим підсиленням, ніж сильні (великого рівня), внаслідок чого має місце стиснення динамічного діапазону. Амплітудна характеристика експандера є оберненою до характеристики компресора (крива 2 на рис. 17.6), тому експандер усуває спотворення, що вносяться в сигнал компресором, і відновлює динамічний діапазон сигналу.
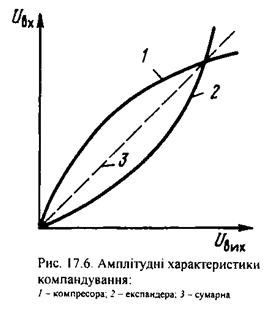 Сумарна амплітудна характеристика системи компресор-експандер є лінійною (крива 3 на рис. 17.6). Підвищення відношення сигнал-шум квантування у разі застосування компресування (нелінійного квантування) визначається зменшенням коефіцієнта амплітуди сигналу і може досягати 10-20 дБ, що є еквівалентним зменшенню довжини коду на два-три розряди.
Сумарна амплітудна характеристика системи компресор-експандер є лінійною (крива 3 на рис. 17.6). Підвищення відношення сигнал-шум квантування у разі застосування компресування (нелінійного квантування) визначається зменшенням коефіцієнта амплітуди сигналу і може досягати 10-20 дБ, що є еквівалентним зменшенню довжини коду на два-три розряди.
Для зниження шуму хибних імпульсів у першу чергу необхідно зменшити ймовірність помилки елементів кодових комбінацій (застосувати більш завадостійкі види модуляції чи кодування). Друга можливість ґрунтується на тому, що для незалежних помилок у каналі ймовірність однієї помилки в кодовій комбінації на кілька порядків перевищує ймовірність двох чи більше помилок. У зв'язку із цим у завадостійких системах з ІКМ застосовують код Грея чи симетричний код (див. рис. 17.4, а, б), в яких одинична помилка в кодовій комбінації в будь-якому символі, крім першого, викликає перехід за рівнем на інтервал, менший за . При цьому в середньому забезпечується менша похибка, ніж при натуральному двійковому коді.
15.3. ДЕЛЬТА-МОДУЛЯЦІЯ
Принципи дельта-модуляції. Дельта-модуляція (ДМ) була запропонована з метою спрощення АЦП та ЦАП. Для перетворення аналогового сигналу в цифровий в АЦП ДМ застосовують однорозрядний код, єдиний символ якого вказує тільки знак (полярність) похідної аналогового сигналу через інтервал дискретизації  . Послідовність формування ДМ-сигналу подано на рис. 17.7. На ділянці
. Послідовність формування ДМ-сигналу подано на рис. 17.7. На ділянці  та
та  аналоговий сигнал зростає (похідна додатна), тому кодові символи ДМ-сигналу набувають значення "+1" і на рис. 17.7, б зображені як імпульсні додатної полярності. На ділянці
аналоговий сигнал зростає (похідна додатна), тому кодові символи ДМ-сигналу набувають значення "+1" і на рис. 17.7, б зображені як імпульсні додатної полярності. На ділянці  сигнал спадає (похідна від'ємна), тому кодові символи ДМ-сигналу набувають значення "-1" і зображені у вигляді імпульсів від'ємної полярності.
сигнал спадає (похідна від'ємна), тому кодові символи ДМ-сигналу набувають значення "-1" і зображені у вигляді імпульсів від'ємної полярності.
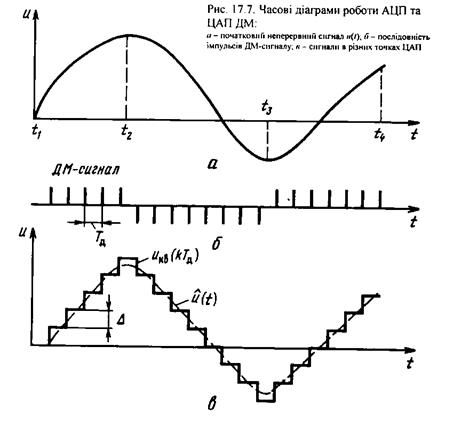 |
Формування із ДМ-сигналу первинного аналогового сигналу також досить просте. Оскільки ДМ-сигнал отримуємо як знак похідної аналогового сигналу, то для перетворення послідовності імпульсів у аналоговий сигнал необхідно виконати операцію, що є оберненою диференціюванню, тобто операцію інтегрування. У схемі ЦАП ДМ-сигналів (рис. 17.8) застосовано ідеальний інтегратор, що має імпульсний відгук у вигляді східця напруги. Якщо до входу такого ідеального інтегратора подати послідовність імпульсів ДМ-сигналу, то відгуки на кожний із них підсумовуються, і вихідна напруга має вигляд східчастої функції часу та є апроксимацією аналогового сигналу. Вона утворилась у результаті дискретизації та квантування, тому позначається як
. Відновлення аналогового сигналу із квантованого , як і в ЦАП ІКМ, здійснюється ФНЧ.
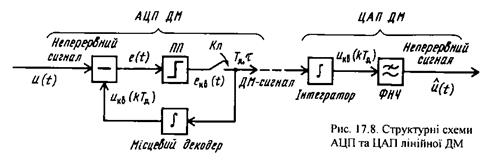 |
В АЦП ДМ, схема якого подана на рис. 17.8 і часові діаграми роботи - на рис. 17.9, своєрідно вирішено задачу знаходження похідної аналогового сигналу
. Нагадаємо, що похідна обчислюється як відношення приросту функції до приросту аргументу. Для того щоб дістати приріст аналогового сигналу, використовують обчислювальний пристрій, на один вхід якого подають неперервний аналоговий сигнал ,а на другий - відновлений інтегратором із вихідного ДМ-сигналу квантований сигнал . Різницевий сигнал  і є апроксимованою похідною сигналу . Функцію квантувача виконує пороговий пристрій ПП, напруга на виході якого відповідає закону різницевого сигналу
і є апроксимованою похідною сигналу . Функцію квантувача виконує пороговий пристрій ПП, напруга на виході якого відповідає закону різницевого сигналу  . Електронний ключ Кл, що замикається на короткий час
. Електронний ключ Кл, що замикається на короткий час  через інтервал дискретизації , є водночас дискретизатором і кодером. На його виході формується послідовність імпульсів ДМ-сигналу.
через інтервал дискретизації , є водночас дискретизатором і кодером. На його виході формується послідовність імпульсів ДМ-сигналу.
Таке технічне рішення побудови АЦП дає можливість, по-перше, дістати точнішу східчасту апроксимацію неперервного сигналу на ділянках із малими приростами, по-друге, усунути невизначеність при перетворенні постійної напруги в ДМ-сигнал (як саме зображати ДМ-сигнал при відсутності приросту) за рахунок змінних імпульсів додатної (+1) та від'ємної (-1) полярностей.
Розглянутий вище метод формування ДМ-сигналу є найпростішою, так званою лінійною (класичною) ДМ, яка запропонована в 1946 - 1948 рр. Делорейном, Ван Миєро, Дер'явичем (Франція) та Л. О.Коробковим (СРСР). Нині існують десятки різновидів ДМ, що відрізняються, головним чином, завбачником (місцевим декодером). Оскільки в ДМ різницевий сигнал формується із вхідного та завбаченого тим чи іншим методом, її досить часто називають системою із завбаченням.
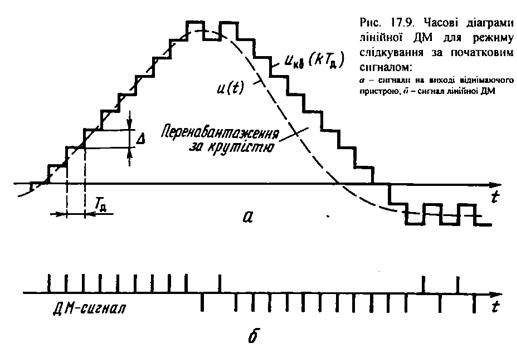
Особливості ДМ. Відновлений первинний сигнал при ДМ лише з деяким наближенням відтворює початковий сигнал. Точність відновлення залежить від частоти дискретизації, кроку квантування, а також від крутості сигналу. Цілком ясно, що для зменшення шуму квантування, як і в разі ІКМ, необхідно брати меншим крок квантування .
Проте при зменшенні кроку східчастої кривої (рис. 17.9, а) необхідне таке саме підвищення частоти дискретизації, інакше східчаста крива не буде збігатись із неперервною. У ДМ частота дискретизації визначається не за теоремою Котельникова, а виходячи із заданої точності відтворення неперервного сигналу. Розрахунки показують, що при однаковому з ІКМ шумі квантування частота дискретизації для ДМ приблизно на порядок вища  . Проте швидкості модуляції В цифрового сигналу в ІКМ та ДМ майже однакові, оскільки в ДМ застосовується однорозрядний код, а в ІКМ - багаторозрядний.
. Проте швидкості модуляції В цифрового сигналу в ІКМ та ДМ майже однакові, оскільки в ДМ застосовується однорозрядний код, а в ІКМ - багаторозрядний.
Зменшення кроку квантування в ДМ призводить до специфічних спотворень, які дістали назву перенавантажень за крутістю. Перенавантаження виникають через те, що відновлений східчастий сигнал після інтегратора за один такт  збільшується (чи зменшується) тільки на один крок , а початковий сигнал за цей час може збільшитись (чи зменшитись) на кілька кроків. Виникає додаткова похибка відновлення. Такий випадок має місце на рис. 17.9, а на спадаючій ділянці неперервного сигналу. Одним із методів боротьби з перенавантаженням за крутістю є застосування змінного кроку квантування (адаптивна ДМ): зі зростанням крутості зростає і крок.
збільшується (чи зменшується) тільки на один крок , а початковий сигнал за цей час може збільшитись (чи зменшитись) на кілька кроків. Виникає додаткова похибка відновлення. Такий випадок має місце на рис. 17.9, а на спадаючій ділянці неперервного сигналу. Одним із методів боротьби з перенавантаженням за крутістю є застосування змінного кроку квантування (адаптивна ДМ): зі зростанням крутості зростає і крок.
 |
Шум хибних імпульсів у ДМ значно менше впливає на якість відновлення сигналу, ніж в ІКМ, оскільки код однорозрядний і помилка призводить до зміни відновленого сигналу на один крок
, а використання у схемі ДМ ідеального інтегратора, що має нескінченну пам'ять, призводить до накопичення помилок. Для боротьби із цим явищем на практиці або періодично обнуляють інтегратор, або застосовують інтегратор з обмеженою постійною часу (RC-інтегратор).
Порівняння ІКМ та ДМ. На запитання: "Яка ж з модуляцій, ІКМ чи ДМ, краща?", - впевненої однозначної відповіді дати неможливо. Усе залежить від виду неперервного сигналу, призначення системи зв'язку, показника, за яким проходить порівняння. Можна лише назвати такі основні особливості ІКМ та ДМ:
1) класична (лінійна) ДМ за залежністю відношення сигнал-шум квантування від швидкості цифрового сигналу дещо гірша, ніж ІКМ, але різновиди ДМ (наприклад, адаптивна з миттєвим компандуванням та подвійним інтегратором у колі зворотного зв'язку) забезпечують однакове з ІКМ відношення сигнал-шум квантування у разі меншої тактової частоти (швидкості модуляції);
2) ДМ більш стійка до завад лінії, тому вимоги до завадостійкості при передаванні ДМ-сигналу на кілька порядків менші, ніж для ІКМ;
3) при ІКМ необхідні як тактова, так і циклова синхронізації, при ДМ -тільки тактова;
4) апаратура формування ДМ-сигналу набагато простіша за апаратуру ІКМ, але у складі багатоканальної системи зв'язку, де обладнання ІКМ є груповим, а ДМ — індивідуальним, сумарна складність обладнання ДМ може бути й більшою.
15.4. ОСОБЛИВОСТІ ПЕРЕДАВАННЯ ЦИФРОВИХ СИГНАЛІВ ЛІНІЯМИ ЗВ'ЯЗКУ
Двійковий цифровий сигнал на виході АЦП ІКМ являє собою випадкову послідовність однополярних імпульсів тривалістю , якими передаються символи "1" (одиниці), при цьому двополярні короткі імпульси ДМ-сигналу для зменшення ширини їх спектра також перетворюються в імпульси тривалістю . Спектральна густина потужності цієї випадкової послідовності імпульсів теоретично нескінченна, але її основна частина розміщується в межах від 0 до  . Якщо порівняти цей спектр з АЧХ реальних радіо та кабельних ліній зв'язку, то чітко видно їх значну різницю. Лінії радіозв'язку мають приблизно постійну АЧХ у деякій смузі, що симетрична навколо частоти переносника. Кабельні лінії (див. § 7.9) з увімкненими до них підсилювачами і регенераторами мають значне ослаблення та нелінійність ФЧХ в областях до 300 кГц та вище за 10-30 МГц (залежно від типу кабелю). Тому для зменшення спотворень цифрового сигналу через невідповідність його спектра й АЧХ лінії використовують додаткове перетворення цифрового сигналу.
. Якщо порівняти цей спектр з АЧХ реальних радіо та кабельних ліній зв'язку, то чітко видно їх значну різницю. Лінії радіозв'язку мають приблизно постійну АЧХ у деякій смузі, що симетрична навколо частоти переносника. Кабельні лінії (див. § 7.9) з увімкненими до них підсилювачами і регенераторами мають значне ослаблення та нелінійність ФЧХ в областях до 300 кГц та вище за 10-30 МГц (залежно від типу кабелю). Тому для зменшення спотворень цифрового сигналу через невідповідність його спектра й АЧХ лінії використовують додаткове перетворення цифрового сигналу.
У лініях радіозв'язку (радіорелейних, супутникових тощо) застосовують ті чи інші види вторинної частотної або фазової маніпуляцій. Якщо приймання некогерентне, переважно застосовується ЧМ-2, якщо когерентне -ВФМ-2 та ВФМ-4.
У кабельних лініях широко розповсюджене передавання цифрових сигналів дворівневими імпульсами постійного струму (напруги). При цьому тривалість імпульсів зменшується до половини інтервалу дискретизації і застосовується спеціальне кодування. Сигнал, що формують цим кодуванням, називають кодом лінії. Найпростішим із кодів є квазітрійковий код із чергуванням полярностей імпульсів (ЧПІ).
Перетворення початкового однополярного цифрового сигналу в код ЧПІ наведено на рис. 17.10. Воно засноване на зміні полярності кожного наступного імпульсу на протилежну за відношенням до попереднього. Постійна складова у спектрі такої послідовності імпульсів відсутня, а основна енергія спектра зосереджена в області тактової частоти і
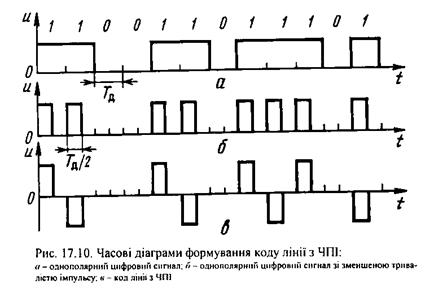 |
і узгоджена з АЧХ кабельної лінії зв'язку. Основним недоліком коду з ЧПІ є трудність забезпечення тактової синхронізації в разі тривалого передавання нулів, тому знаходять застосування й інші коди лінії, які відрізняються методами обмеження числа нулів, що передаються один за одним.
Історично склалось так, що описане аналого-цифрове перетворення називають модуляцією. Проте за сутністю це двійкове кодування неперервного сигналу. Тому точніше вважати перетворення, що здійснюються в АЦП та ЦАП, кодуванням та декодуванням.
Date: 2016-02-19; view: 2218; Нарушение авторских прав