Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Общая схема испытаний
|
|
При планировании испытаний (в узком смысле) принципиально возможны два подхода: пассивный и активный. Пассивные испытания заключаются в наблюдении и регистрации входных и выходных параметров объектов в режиме нормального функционирования (при фиксированных нагрузках). Планирование испытаний сводится к выбору стационарного режима испытаний. Активные испытания проводятся посредством наблюдения и регистрации процесса после внесения в него возмущений. Сущность активного подхода заключается в одновременном варьировании по определенному закону значений из совокупности факторов  , которое ведется по целесообразно составленной программе, называемой матрицей планирования.
, которое ведется по целесообразно составленной программе, называемой матрицей планирования.
План испытания характеризуется спектром плана (нормированным спектром)
 или
или  , (1)
, (1)
где  определяет уровни, на которых находится каждый из факторов в
определяет уровни, на которых находится каждый из факторов в  -м испытании;
-м испытании;  – число повторных испытаний;
– число повторных испытаний;
 ,
,  – суммарное количество испытаний,
– суммарное количество испытаний,  ,
,  .
.
Схему планирования испытаний рассмотрим применительно к случаю доводочных испытаний, проводимых с целью достижения экстремального (заданного) значения выходного параметра. Планирование включает: определение пространства факторов, выбор стратегии испытаний.
Совокупность факторов  должна быть достаточно полной (включать все существенные факторы), а каждый из факторов отвечать требованиям однозначности, управляемости, независимости и совместимости с другими факторами. Так, при опытной отработке двигателя внутреннего сгорания, когда при выбранном типе двигательной установки и виде топлива решается задача обеспечения требуемой тяги
должна быть достаточно полной (включать все существенные факторы), а каждый из факторов отвечать требованиям однозначности, управляемости, независимости и совместимости с другими факторами. Так, при опытной отработке двигателя внутреннего сгорания, когда при выбранном типе двигательной установки и виде топлива решается задача обеспечения требуемой тяги  и ресурса
и ресурса  , в качестве
, в качестве  могут использоваться тип форсунок, их количество, соотношение, размещение, тип головки, литраж и геометрия блока цилиндров, способ охлаждения и т. д.
могут использоваться тип форсунок, их количество, соотношение, размещение, тип головки, литраж и геометрия блока цилиндров, способ охлаждения и т. д.
При выборе стратегии испытаний в общем случае можно выделить три основных этапа.
1. Планирование и проведение испытаний в ограниченной области с конечной целью установить градиентное направление (направление, в котором угол наклона функции отклика максимален). Решение задачи может осуществляться с помощью линейных уравнений регрессии.
2. 

 Последовательное движение в градиентном направлении (в частном случае «крутое восхождение»). На этом этапе, зная градиентное направление, выбирают другую ограниченную область в факторном пространстве, где и проводят новую серию испытаний. Крутое восхождение ведется до тех пор, пока не будет достигнута так называемая «почти стационарная область», в которой вариации факторов слабо влияют на значение выходных параметров.
Последовательное движение в градиентном направлении (в частном случае «крутое восхождение»). На этом этапе, зная градиентное направление, выбирают другую ограниченную область в факторном пространстве, где и проводят новую серию испытаний. Крутое восхождение ведется до тех пор, пока не будет достигнута так называемая «почти стационарная область», в которой вариации факторов слабо влияют на значение выходных параметров.
3. Планирование и проведение испытаний в почти стационарной области, где окончательно определяется совокупность значений факторов , при которых обеспечивается экстремальное (требуемое) значение  . На этом этапе учитывается нелинейный характер связей между и .
. На этом этапе учитывается нелинейный характер связей между и .
Основу современного подхода к планированию многофакторных испытаний составляют активные методы, из числа которых широкое распространение получили полные и дробные факторные планы (ПФП и ДФП). Пассивные методы сохраняют свое значение в ходе проведения промышленных экспериментов на стадии серийного производства вооружения, при изучении опыта эксплуатации ракетных и артиллерийских комплексов в войсках, а также в тех случаях, когда при испытании не удается устранить шумовое поле, вызываемое неуправляемыми переменными или случайными помехами, накладываемыми на управляемые факторы.
Полные факторные планы испытаний
Планирование по схеме полного факторного плана предусматривает реализацию всех возможных комбинаций на каждом из выбранных уровней. Общее количество испытаний  , где
, где  – количество уровней,
– количество уровней,  – число факторов.
– число факторов.  , если при каждом сочетании факторов проводится только одно испытание. Если испытания проводятся при двух уровнях факторов
, если при каждом сочетании факторов проводится только одно испытание. Если испытания проводятся при двух уровнях факторов  , то реализуется план
, то реализуется план  , при
, при 
 и т. д. Формирование ПФП включает два этапа.
и т. д. Формирование ПФП включает два этапа.
На первом этапе выбирается совокупность факторов  , удовлетворяющих сформулированным требованиям, после чего определяется локальная область факторного пространства, в которой намечается проведение испытаний. При планировании по схеме эта область устанавливается посредством задания основного уровня и интервала варьирования. Основным уровнем (центром плана) называют многомерную точку
, удовлетворяющих сформулированным требованиям, после чего определяется локальная область факторного пространства, в которой намечается проведение испытаний. При планировании по схеме эта область устанавливается посредством задания основного уровня и интервала варьирования. Основным уровнем (центром плана) называют многомерную точку  в факторном пространстве. В зависимости от целей испытаний координаты
в факторном пространстве. В зависимости от целей испытаний координаты  могут соответствовать номинальным значениям параметров или выбираться в центре области их изменения, подлежащей изучению. Интервал варьирования устанавливают симметрично относительно основного уровня и определяют для каждого из факторов по формуле
могут соответствовать номинальным значениям параметров или выбираться в центре области их изменения, подлежащей изучению. Интервал варьирования устанавливают симметрично относительно основного уровня и определяют для каждого из факторов по формуле
 , (2)
, (2)
где  ,
,  – максимальные и минимальные значения каждого из факторов (определяющих фактор параметров).
– максимальные и минимальные значения каждого из факторов (определяющих фактор параметров).
Интервал варьирования выбирается из прогнозируемых значений выходного параметра и условий технической осуществимости вариаций входных воздействий с учетом затрат на выполнение работ.
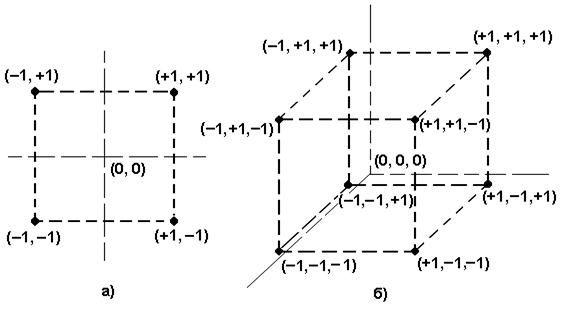
Рис. 1. Схемы ПФП типа  и
и 
ПФП составляют в виде матрицы планирования, используя кодированную (безразмерную) систему координат. Переход к безразмерной системе координат осуществляется по формулам
 ;
;  . (3)
. (3)
В кодированной системе верхний уровень изменения любого фактора равен  , нижний
, нижний  , а координаты центра плана равны нулю и совпадают с началом координат. На рис. 3.1 изображены схемы ПФП типа и – соответственно прямоугольник и куб. Матрица ПФП ,
, а координаты центра плана равны нулю и совпадают с началом координат. На рис. 3.1 изображены схемы ПФП типа и – соответственно прямоугольник и куб. Матрица ПФП ,  приведена в табл. 1, а (обозначение 1 в таблице опущено), где столбцы (вектор-столбцы) показывают, какие значения принимает каждый из факторов
приведена в табл. 1, а (обозначение 1 в таблице опущено), где столбцы (вектор-столбцы) показывают, какие значения принимает каждый из факторов  в очередном испытании, а строки (вектор-строки) характеризуют режим каждого отдельного испытания. Так, например, при изучении влияния условий подачи компонентов топлива на выходные параметры ЖРД первый опыт проводится при минимальных расходах горючего и окислителя, четвертый – при максимальных, второй – при максимальной подаче горючего
в очередном испытании, а строки (вектор-строки) характеризуют режим каждого отдельного испытания. Так, например, при изучении влияния условий подачи компонентов топлива на выходные параметры ЖРД первый опыт проводится при минимальных расходах горючего и окислителя, четвертый – при максимальных, второй – при максимальной подаче горючего  и минимальной окислителя
и минимальной окислителя  и т. д.
и т. д.
Таблица 1
| Номер опыта | 
| 
| 
|
| Номер опыта |
|
|
| 
|
|
| + | – | – | 
| + | – | – | + |
| ||
| + | – | + | 
| + | – | + | – |
| ||
| + | + | – | 
| + | + | – | – |
| ||
| + | + | + | 
| + | + | + | + |
|
Первый столбец используется только для выполнения расчетов ( – фиктивная переменная). В последнем столбце записываются результаты испытания.
Порядок перехода от плана к плану  показан в табл. 2. Аналогично методом «перевала» можно перейти к планам с большим числом факторов.
показан в табл. 2. Аналогично методом «перевала» можно перейти к планам с большим числом факторов.
Таблица 2
| Номер опыта |
|
|
| 
|
| Номер опыта |
|
|
|
|
|
| + | – | – | – |
| + | – | – | + | 
| ||
| + | – | + | – |
| + | – | + | + | 
| ||
| + | + | – | – |
| + | + | – | + | 
| ||
| + | + | + | – |
| + | + | + | + | 
|
Приведенные в табл. 1 и 2 матрицы планирования обладают свойствами ортогональности, симметричности и нормировки.
Свойство симметричности относительно центра опыта заключается в том, что алгебраическая сумма элементов вектор-столбцов каждого из факторов равна нулю:
 ;
;  ;
;  . (4)
. (4)
Условие нормировки подтверждается равенством суммы квадратов элементов каждого столбца числу опытов:
 ;
;  . (5)
. (5)
Свойство ортогональности определяется равенством нулю произведений любых двух вектор-столбцов:
 ;
;  . (6)
. (6)
Предполагается, что при перемножении элементов с одноименными знаками получаем , с разноименными .
Свойство ортогональности позволяет резко уменьшить трудоемкость вычислений коэффициентов регрессии, так как матрица нормальных уравнений становится диагональной, причем ее диагональные элементы равны числу испытаний , заданных матрицей ПФП.
Воспользуемся матрицей планирования (табл.1) для получения уравнения регрессии вида
 . (7)
. (7)
При вычислении  оценок коэффициентов регрессии
оценок коэффициентов регрессии  по формуле последовательно получим
по формуле последовательно получим
Отсюда
 ;
;  ;
;
 ;
;  .
.
Таким образом, каждый из коэффициентов вычисляется независимо и по простой формуле, которая в общем случае имеет вид
 . (8)
. (8)
Поскольку все диагональные элементы матрицы ошибок  равны между собой, каждая из оценок получена с одинаковой (и минимальной) дисперсией
равны между собой, каждая из оценок получена с одинаковой (и минимальной) дисперсией
 , (9)
, (9)
где  – ошибка опыта.
– ошибка опыта.
Рассмотренные ПФП являются оптимальными в том смысле, что при их реализации для данного числа испытаний определитель матрицы ошибок минимален. Геометрически это означает, что сведен к минимуму объем эллипсоида рассеивания оценок параметров. Важным свойством полученных планов является также рототабельность, которая заключается в том, что точность предсказания значений выходной характеристики  одинакова на равных расстояниях от центра плана и не зависит от направления.
одинакова на равных расстояниях от центра плана и не зависит от направления.
План типа позволяет получить модель в виде уравнения второго порядка
 .
.
Для вычисления коэффициента  , характеризующего совместное воздействие факторов и вводится дополнительный вектор-столбец (табл.1), элементы которого определяют, перемножая попарно элементы столбцов и .
, характеризующего совместное воздействие факторов и вводится дополнительный вектор-столбец (табл.1), элементы которого определяют, перемножая попарно элементы столбцов и .
Расширенная матрица ПФП , обеспечивающая получение модели в виде более сложного полинома

представлена в табл. 3. В нижней строке таблицы приведены вычисленные по формуле (8) оценки коэффициентов . Значения  содержатся в последнем столбце.
содержатся в последнем столбце.
Например,
 ;
;
 .
.
Таблица 3
| Номер опыта |
|
|
|
|
| 
| 
| 
|
|
| + | – | – | – | + | + | + | – | ||
| + | – | + | – | – | + | – | + | ||
| + | + | – | – | – | – | + | + | ||
| + | + | + | – | + | – | – | – | ||
| + | – | – | + | + | + | – | + | ||
| + | – | + | + | – | – | + | – | ||
| + | + | – | + | – | – | – | – | ||
| + | + | + | + | + | + | + | + | ||
|
| 7,5 | 0,625 | 1,5 | –2 | 0,75 | -0,75 |
Дробные факторные планы испытаний. Планирование испытаний
Можно сократить число испытаний, если от ПФП перейти к дробным факторным планам, или дробным репликам от полного факторного эксперимента. При переходе от ПФП к ДФП важно сохранить ортогональность матрицы планирования. С этой целью в качестве реплики (ДФП) пользуются ПФП для меньшего числа факторов. Такая возможность существует, поскольку в ПФП число испытаний значительно превосходит количество определяемых коэффициентов линейной модели.
Пусть требуется получить уравнение регрессии вида
 . (10)
. (10)
Для решения задачи можно ограничиться четырьмя испытаниями  , если в ПФП (табл. 4, а) столбец использовать в качестве плана для
, если в ПФП (табл. 4, а) столбец использовать в качестве плана для  (табл. 4, а). Теперь элементы столбца
(табл. 4, а). Теперь элементы столбца  служат не для расчета оценки , а характеризуют уровень фактора в каждом из опытов. Использованный план составляет половину ПФП , называется полурепликой (
служат не для расчета оценки , а характеризуют уровень фактора в каждом из опытов. Использованный план составляет половину ПФП , называется полурепликой ( -репликой) от и записывается формулой
-репликой) от и записывается формулой  . В рассмотренной задаче возможны два варианта ДФП (табл. 4, а, б).
. В рассмотренной задаче возможны два варианта ДФП (табл. 4, а, б).
Таблица 4
а) б)
| Номер опыта |
|
| 
| Номер опыта |
|
| 
| |
| – | – | + | – | – | – | |||
| – | + | – | – | + | + | |||
| + | – | – | + | – | + | |||
| + | – | + | + | + | – |
Общее правило перехода от ПФП к ДФП сводится к следующему: для сокращения числа испытаний новому фактору присваивается вектор-столбец, принадлежащий взаимодействию, которым можно пренебречь. Формула ДФП имеет вид  , где
, где  – количество факторов, введенных посредством замещения исключаемых из рассмотрения взаимодействий. В зависимости от соотношения чисел и реализуются ,
– количество факторов, введенных посредством замещения исключаемых из рассмотрения взаимодействий. В зависимости от соотношения чисел и реализуются ,  ,
,  и т. д. реплики ПФП.
и т. д. реплики ПФП.
Сокращение числа испытаний в рассмотренном примере достигнуто за счет утраты части информации: из рассмотрения исключено парное взаимодействие . В результате полученные оценки  ,
,  ,
,  оказались смешанными оценками генеральных коэффициентов
оказались смешанными оценками генеральных коэффициентов
 ;
;  ;
;  ,
,
поскольку соответствующие вектор-столбцы совпадают ( неразличимо с  и т. д.). Эффективность ДФП определится тем, насколько удачно выбрана система смешивания линейных эффектов и эффектов взаимодействий. Поэтому при обращении к ДФП необходимо уметь заранее установить, какие из ,
и т. д.). Эффективность ДФП определится тем, насколько удачно выбрана система смешивания линейных эффектов и эффектов взаимодействий. Поэтому при обращении к ДФП необходимо уметь заранее установить, какие из ,  являются несмешанными оценками соответствующих генеральных коэффициентов – определить разрешающую способность дробных реплик. Для этого находят применение понятия генерирующего соотношения и определяющего контраста.
являются несмешанными оценками соответствующих генеральных коэффициентов – определить разрешающую способность дробных реплик. Для этого находят применение понятия генерирующего соотношения и определяющего контраста.
Соотношение, показывающее, с каким из эффектов смешан рассматриваемый эффект, называют генерирующим. В рассмотренном примере это  или
или  . Определяющим контрастом называется символическое обозначение произведения столбцов. Умножая левую и правую части определяющего контраста на и памятуя, что
. Определяющим контрастом называется символическое обозначение произведения столбцов. Умножая левую и правую части определяющего контраста на и памятуя, что  , получим определяющий контраст
, получим определяющий контраст  или
или  . Теперь, последовательно умножая левые и правые части на , , , можно выявить систему смешивания факторов. Для ДФП (табл. 4,б)
. Теперь, последовательно умножая левые и правые части на , , , можно выявить систему смешивания факторов. Для ДФП (табл. 4,б)
 ;
;  ; ,
; ,
откуда следует система смешивания
 ;
;  ;
;  .
.
Для ДФП (табл. 2.5, а) аналогичным путем получаются приведенные ранее соотношения.
Обращаясь к ДФП , заметим, что матрица (табл. 4, а, б) совпадает с ПФП (табл. 1). Иначе план является опорным при построении дробной реплики . При с помощью ДФП удается учесть только один дополнительный фактор. Оценим, сколько же дополнительных факторов можно учесть, используя в качестве опорного ПФП  . Из табл. 3 видно, что можно частично или полностью замещать четыре взаимодействия
. Из табл. 3 видно, что можно частично или полностью замещать четыре взаимодействия  то есть вводить дополнительно до четырех факторов. При замещении одного фактора имеет место ДФП
то есть вводить дополнительно до четырех факторов. При замещении одного фактора имеет место ДФП  ( -реплика от ПФП
( -реплика от ПФП  ), двух –
), двух –  ( от ПФП
( от ПФП  ),трех –
),трех –  ( от
( от  ), четырех –
), четырех –  (
( от ПФП
от ПФП  ). Если замещению подлежат все взаимодействия, то план называют насыщенным. В этом случае в модели учитываются только линейные взаимодействия. Для всех рассмотренных ДФП
). Если замещению подлежат все взаимодействия, то план называют насыщенным. В этом случае в модели учитываются только линейные взаимодействия. Для всех рассмотренных ДФП  . Сравним, что при реализации ПФП, если
. Сравним, что при реализации ПФП, если  , то
, то  (используется ПФП ); при
(используется ПФП ); при 
 (); при
(); при 
 (); при
(); при 
 (). В табл. 5 приведен пример формирования ДФП при различном выборе генерирующих соотношений.
(). В табл. 5 приведен пример формирования ДФП при различном выборе генерирующих соотношений.
Последовательность формирования ДФП включает: уяснение количества факторов и допустимого числа (в примере ), выбор реплики (), построение опорного плана (), установление генерирующих соотношений, нахождение определяющего контраста (обобщенного контраста), уяснение системы смешивания.
Выбор системы смешивания осуществляется на основе анализа физической сущности процесса, изучения конструкторской документации и данных предшествующих этапов испытаний. В общем случае стремятся отсеивать взаимодействия относительно высоких порядков.
Таблица 5
| Генерирующее соотношение | |

| 
|
| Определяющий контраст | |

| |
| Система смешивания | |
 , , 
|  , , 
|
 , , 
|  , , 
|
 , , 
|  , , 
|
| Система оценок | |
| 
|
| 
|
| 
|
| 
|
| 
|
| 
|
| Вид модели | |

|
|

| 
|
При выборе, например, ДФП ( -реплики) возможны 12 вариантов решения. Если принять ,  , то система смешивания задается обобщающим определяющим контрастом, который получают, перемножая определяющие контрасты
, то система смешивания задается обобщающим определяющим контрастом, который получают, перемножая определяющие контрасты  и
и  между собой:
между собой:
 .
.
Тогда получается следующая система совместных оценок:
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  .
.
Соответствующий план испытаний показан в табл. 6.
Таблица 6
| Номер опыта |
|
|
| 
| 
| Номер опыта |
|
|
|
|
|
| – | – | – | – | + | – | – | + | + | + | ||
| – | + | – | + | – | – | + | + | – | – | ||
| + | – | – | + | – | + | – | + | – | – | ||
| + | + | – | – | + | + | + | + | + | + |
ДФП типа , как и ПФП, обладают следующими преимуществами: они ортогональны; каждый из коэффициентов вычисляется по всем испытаниям; все коэффициенты вычисляются с одинаковой и минимальной дисперсией.
При проведении испытаний учитывают, что изменение выходного параметра из-за влияния неконтролируемых факторов имеет случайный характер. Поэтому предусматривается случайный порядок проведения испытаний (рандомизация факторов). С этой целью последовательность испытаний (реализация строк матрицы планирования) определяется с помощью таблицы случайных чисел.
Date: 2015-05-23; view: 1016; Нарушение авторских прав