Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Схемы для управления электродвигателями
|
|
Одна из областей применения непосредственных преобразователей — управление двигателями постоянного тока. Двигатель как нагрузка предъявляет к преобразователю некоторые специфические требования. Например, преобразователь должен обеспечивать режим рекуперации энергии в источник питания при торможении двигателя.
Двухсторонний обмен энергией между источником питания и нагрузкой обеспечивает схема с шунтирующим транзистором, приведенная на рис. 20.
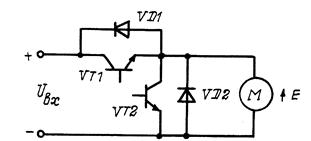
Рис. 20
Транзисторы VT1 и VT2 в этой схеме переключаются в противофазе, как показано на рис. 21 (см. диаграммы напряжений управления транзисторами uy1 и иу2).
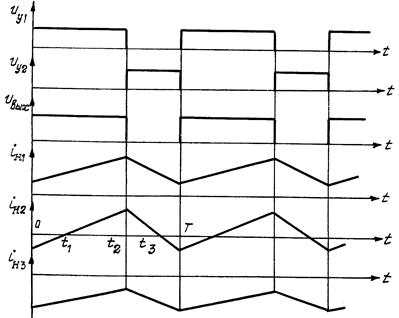
Рис. 21
При работе рассматриваемой схемы возможны несколько режимов. При Uвхg > Е энергия потребляется от источника питания, ток нагрузки in1 поочередно протекает то через основной транзистор VT1, то через обратный диод VD2, как и в основной схеме (см. рис. 1, а).
При увеличении э.д.с. Е среднее значение тока нагрузки уменьшается и наступает режим переменных токов (Е» Uвх.g ). В кривой тока нагрузки iн2 имеются четыре интервала:
0 – t1 — энергия отдается нагрузкой в источник питания через диод VD1;
t1 – t2 — энергия потребляется от источника питания через транзистор VT1;
t2 – t3 энергия рассеивается в активных сопротивлениях нагрузки и диода VD2;
t3 – Т — энергия рассеивается в активных сопротивлениях нагрузки и транзистора VT2.
Если при том же значении g скорость вращения якоря двигателя изменится и э.д.с. Е станет больше Uвхg, то направление тока нагрузки изменится (см. диаграмму iнз на рис. 21). При этом, когда транзистор VT2 открыт, энергия в индуктивности якоря накапливается под действием противоэ.д, с., а при запирании VT2 она отдается в источник питания через диод VD1.
Рассмотренная выше схема позволяет регулировать выходное напряжение лишь при одной его полярности и поэтому называется нереверсивной.
Существуют также и реверсивные схемы, позволяющие не только регулировать выходное напряжение, но и изменять его полярность (а значит, и изменять направление вращения якоря двигателя). На рис. 22 представлена схема мостового реверсивного преобразователя.
В схеме возможны три способа управления транзисторами. При симметричном управлении транзисторы переключаются попарно: VT1 и VT2 или VT3 и VT4. Когда открыты транзисторы VT1 и VT2, как показано на диаграммах на рис. 23, от источника питания потребляется энергия. При запирании упомянутых транзисторов и отпирании транзисторов VT3 и VT4 напряжение на нагрузке реверсируется, а ток нагрузки за счет э.д.с. самоиндукции индуктивности якоря сохраняет своё прежнее направление, замыкаясь через диоды VD3 и VD4 и источник питания.
Среднее значение выходного напряжения
 ,
,
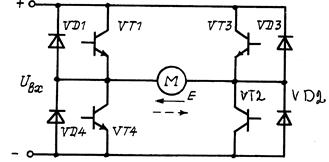
Рис. 22

Рис. 23
т.е. выходное напряжение равно нулю при g = 0,5, положительно при у > 0,5 и отрицательно при у < 0,5.
Недостатком преобразователя с симметричным управлением является изменение полярности выходного напряжения на каждом периоде работы транзисторов и вследствие этого повышенный коэффициент пульсаций.
При несимметричном управлении, как показано на рис. 24, транзисторы одного плеча моста — VT1 и VT4 (или VT2 и VT3 при реверсе выходного напряжения) управляются в противофазе, а транзисторы другого плеча – один (VT2) все время открыт, а другой (VT3) – закрыт.
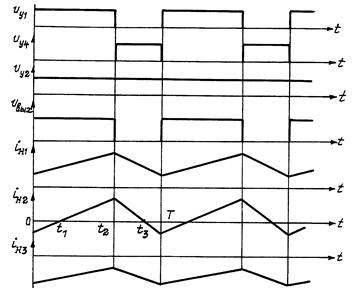
Рис. 24
Если нагрузкой является двигатель постоянного тока, то при E энергия потребляется от источника питания. При этом ток нагрузки на интервале 0 – t2 протекает через транзисторы VT1 и VT2, а на интервале t2 — Т- через транзистор VT2 и обратный диод VD4( см. диаграмму iн1). Если при этом же значении g скорость вращения двигателя изменится и э.д.с. Е станет больше Uвхg, то направление тока нагрузки изменится. При открытом транзисторе VT4 энергия в индуктивности якоря накапливается под действием противоэ.д.с. (ток iн3 протекает через VT4 и VD2), а при запирании транзистора VT4 отдается в источник питания через обратные диоды VD1 и VD2.
При Е» Uвхg в преобразователе возникает режим переменных токов нагрузки:
на интервале 0 – t1 ток протекает через обратные диоды VD1, VD2 и источник питания;
на интервале t1 – t2 — через транзисторы VT1 и VT2;
на интервале t2 – t3 через транзистор VT2 и обратный диод VD4;
на интервале t3 – Т — через транзистор VT4 и обратный диод VD2 (см. диаграмму тока iн2)
Сравнивая диаграммы выходного напряжения Uвых (см. рис. 23 и рис. 24) можно видеть, что при несимметричном управлении транзисторами коэффициент пульсаций выходного напряжения в два раза меньше, чем при симметричном управлении.
При поочередном управлении частота переключений каждого из коммутирующих транзисторов вдвое меньше частоты выходного напряжения, как это можно видеть из диаграмм на рис. 25.
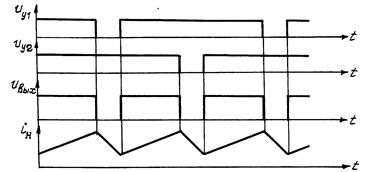
Рис. 25
При одной полярности выходного напряжения поочередно открываются транзисторы VT1 и VT2 (транзисторы VT3 и VT4 при этом все время закрыты). При обратной полярности выходного напряжения коммутируются транзисторы VT3 и VT4, а транзисторы VT1 и VT2 постоянно закрыты. При таком законе управления выходное напряжение имеет форму знакопостоянных импульсов.
При запирании транзистора VT1 ток нагрузки под действием э.д.с. самоиндукции замыкается через транзистор VT2 и обратный диод VD4, нагрузка оказывается закороченной и выходное напряжение равно нулю.
Из рассмотрения способов управления транзисторами реверсивного преобразователя следует, что при симметричном и несимметричном управлении обеспечивается двусторонний обмен энергией между источником питания и нагрузкой (т.е. обеспечивается режим рекуперации), а при поочередном управлении такой режим отсутствует.
Date: 2015-05-09; view: 1301; Нарушение авторских прав