Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
ПРОГРАММНО-АДАПТИВНОЕ УПРАВЛЕНИЕ
|
|
1) Внешние обратные связи в системе есть (рис. 107).
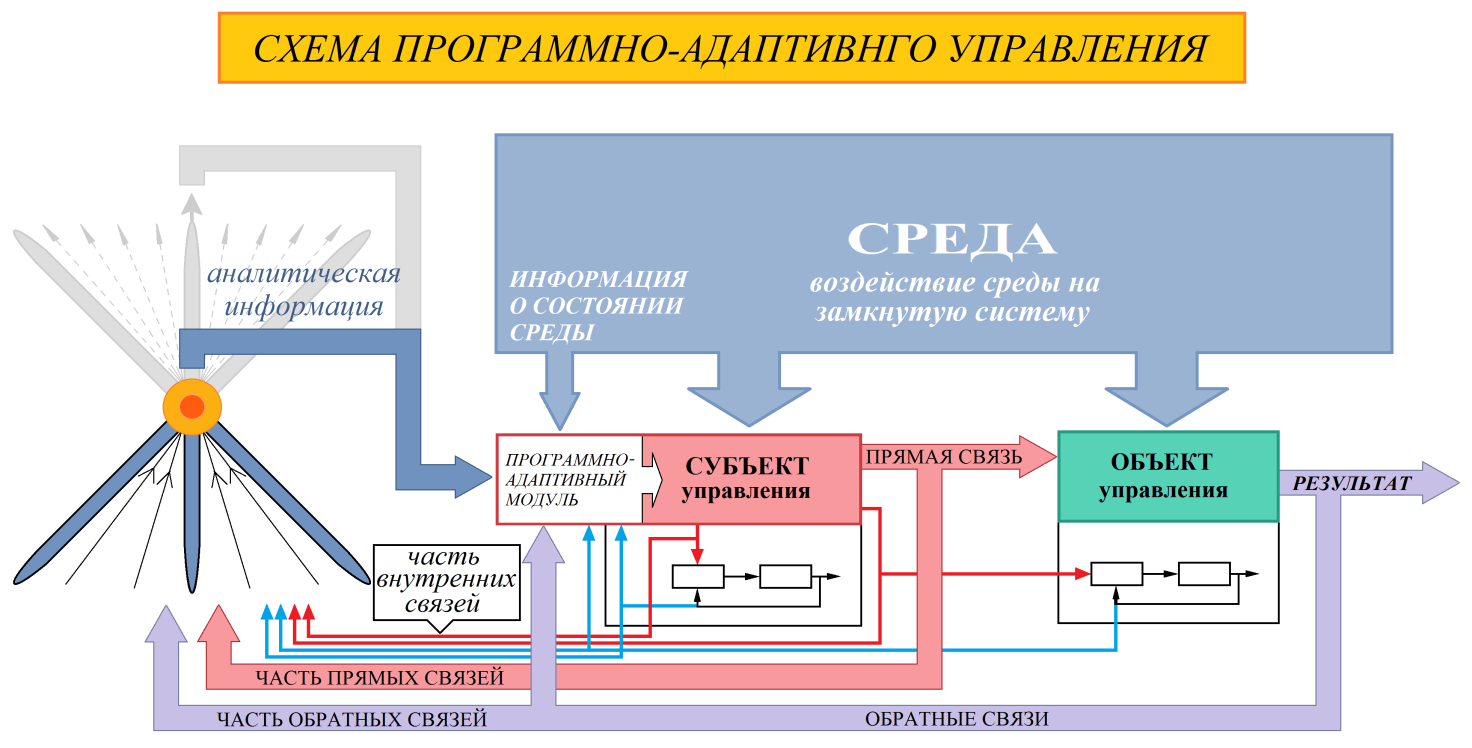
Рис. 107
2) Управляющий сигнал является функцией реальных параметров внешней среды и замкнутой системы, информация о которых поступает по цепям внешних и внутренних обратных связей. Но в то же время управляющий сигнал является и однозначной функцией программы (закона управления) в том смысле, что:
Ø одинаковой информации, поступающей по цепям обратных связей,
Ø всегда соответствует ОДИН и тот же управляющий сигнал.
Эту тождественность реакции «вход — выход» можно понимать и в смысле соответствия статистических характеристик управляющего сигнала информации, поступающей по цепям обратных связей.
Реакция системы на возмущение до некоторой степени гибкая в том смысле, что управляющий сигнал и реакция замкнутой системы на возмущения — функция этих возмущений.
3) Программно-адаптивная схема может реализовывать разные принципы управления. Отметим два наиболее часто встречающихся:
1. управление по возмущению,
2. управление по отклонению.
Ø В первом случае система управления вырабатывает управляющий сигнал на основе измерения в процессе управления возмущающего непосредственно воздействия (рис. 108).

Рис. 108
Ø Во втором случае система управления вырабатывает управляющий сигнал на основе измерения контрольных параметров и оценки их отклонений от значений, характеризующих идеальный режим управления (рис. 109).

Рис. 109
Ø При необходимости оба принципа могут сочетаться в одной и той же системе управления.
Предположим, что мы проектируем систему автоматического управления температурным режимом в помещении. Мы можем построить её так, что обогреватели будут включаться в результате регистрации системой падения температуры в помещении ниже заданного значения. Это будет реализацией принципа управления по отклонению.
Но мы можем построить систему такого назначения и иначе. Поскольку температура в помещении обычно падает после того, снизится среднесуточная температура наружного воздуха, остынут стены помещения и в него попадёт холодный наружный воздух, то мы имеем возможность регистрировать температуру наружного воздуха, вычислять среднесуточную температуру, и, не дожидаясь того момента, когда стены остынут и начнётся снижение температуры в помещении, давать команду на включение обогревателя в каком-то режиме немедленно в случае снижения среднесуточной температуры до заданного порогового значения. Кроме того, режим функционирования обогревателя может быть функцией разницы среднесуточной наружной температуры и текущего значения температуры в помещении. В последнем варианте в программно-адаптивной схеме управления будут сочетаться оба принципа управления — по возмущению и по отклонению.
Если нет возможности измерять контрольный параметр непосредственно в процессе управления (то есть в отношении него разорваны внешние и внутренние обратные связи), то в таком случае вместо не поддающегося непосредственному измерению значения контрольного параметра может быть использована его косвенная оценка на основе его:
- производных,
- интегральных
- и иным образом информационно с ним связанных параметров, которые измеряются непосредственно.
Однако в этом случае программно-адаптивное управление имеет свойство неограниченно накапливать с течением времени ОШИБКУ рассогласования по контрольному параметру.
Причина неограниченного накопления ошибки управления по контрольному параметру — накопление ошибок измерения и преобразования измеренных величин в процессе косвенной оценки необходимой характеристики.
Примерами такого рода ошибок полна летопись морских катастроф, когда навигаторы, не видя берега в течение многих недель, из-за плохой погоды не видя звезд, вынуждены были определять место корабля по счислению (на основе расчётов), и из-за ошибок в измерении скорости хода, ошибок в оценке влияния ветра и течений, неточности хода корабельных хронометров (часов) и ошибочного показания компасов теряли точные координаты (место) и гибли на камнях, которые по их расчётам должны были находиться за много миль от них. Таков же механизм накопления ошибок инерциальными навигационными системами, употребляемыми в ракетно-космической технике, на подводных лодках и системах оружия, в которых текущие координаты объекта определяются на основе ввода исходных координат, измерения ускорений и их двукратного интегрирования.
ð Качество управления при употреблении программной схемы ниже в сопоставлении с программно-адаптивной при одинаковой алгоритмике моделирования поведения объекта, положенной в основу формирования управляющего сигнала. НО! И возможное качество управления при программно-адаптивной схеме может оказаться НИЖЕ минимально необходимого уровня в сложившихся условиях.

Рис. 110
ð ЕСЛИ бы в состав замкнутой системы входила идеальная система управления, то она формировала бы управляющий сигнал так, что:
— управляющее воздействие в каждый момент времени в точности компенсировало бы возмущающее воздействие, вследствие чего вектор ошибки управления сохранял бы своё нулевое значение неограниченно долгое время.
Но в большинстве случаев возмущающее воздействие прямому измерению не поддаётся. Но даже если что-то и возможно измерить, то существует порог чувствительности средств измерения величин всех факторов, на основе информации о которых формируется управляющий сигнал. Информация при передаче искажается в некоторых пределах в самой системе. Системе управления требуется время на формирование и передачу управляющего сигнала. Средства управления также обладают ограниченным быстродействием. Сам объект управления обладает характеристиками инерции, и ему необходимо время, чтобы отреагировать на возмущающее воздействие, в результате чего возмущенное движение объекта также успевает набрать инерцию и требуется более мощное управляющее воздействие, чтобы вернуть объект к исходному режиму; но объекту необходимо время и для реакции на управляющее воздействие. По этим причинам управляющее воздействие, соответствующее в некоторой мере вызвавшему его возмущающему воздействию, в программно-адаптивной схеме управления НЕИЗБЕЖНО ЗАПАЗДЫВАЕТ. Даже если мощность средств управления достаточна, чтобы полностью компенсировать возмущающее воздействие, она не может быть полностью использована вследствие того, что всегда имеет место фазовый сдвиг между возмущающим воздействием и компенсирующим его управляющим (рис. 111)

Рис. 111
По этой причине объект всегда находится под возмущающим воздействием факторов, реально учитываемых системой управления, не говоря уж о воздействии не учитываемых факторов:
- неопознанных,
- признанных мало влияющими,
- оказавшихся ниже порогов чувствительности средств измерения и т.п.
Соответственно замкнутая система — колебательная система, преобразующая возмущающее воздействие и управляющее воздействие в вектор ошибки управления, изменения которого в устойчивом процессе управления носят колебательный характер.
Потребность уменьшить вектор ошибки управления приводит к схеме «предиктор-корректор» — предуказатель-поправщик, предсказатель-поправщик. Смысл слова «предуказатель» объемлет смысл слова «предсказатель», но на Западе и в отечественной научной традиции уже принят термин «предиктор-корректор», однако не в общем управленческом смысле, а в ограниченном: в технике и вычислительной математике.
Термин «предиктор-корректор» — название одного из методов вычислительной математики. В нём последовательными приближениями находится решение задачи. При этом алгоритм метода представляет собой цикл, в котором в последовательности друг за другом выполняются две операции:
ð первая — ПРОГНОЗ РЕШЕНИЯ
ð вторая — ПРОВЕРКА ПРОГНОЗА НА УДОВЛЕТВОРЕНИЕ ТРЕБОВАНИЯМ К ТОЧНОСТИ РЕШЕНИЯ ЗАДАЧИ.

Поэтому мы, оговорив по-русски особенности понимания — «предуказатель-поправщик», а не «предсказатель-поправщик» — сохраняем уже прижившееся на Западе термин «предиктор-корректор», однако расширив область его применения введением в контекст достаточно общей теории управления.
Date: 2015-10-19; view: 1209; Нарушение авторских прав