Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Пример решения задачи Д5
|
|
Механическая система состоит из ступенчатого шкива 2 (радиусы ступеней R2 и r2), груза 1 и сплошного катка 3, прикрепленных к концам нитей, намотанных на ступени шкива (рис. Д5). На шкив при его вращении действует момент сил сопротивления М2. Массу шкива следует считать равномерно распределенной по внешнему ободу.
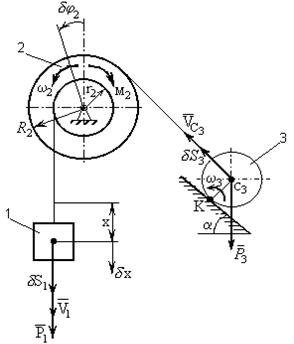
Рис. Д5
Д а н о: R2 = R; r2 = 0,5R; P1 = 8P; P2 = 4P; P3 = 6P; M2 = 0,2PR; a = 30°.
О п р е д е л и т ь: а 1 – ускорение груза 1.
 Р е ш е н и е
Р е ш е н и е
Система имеет одну степень свободы. Выберем в качестве обобщенной координаты перемещение х груза 1 (q = x), полагая, что груз движется вниз, и, отсчитывая х в сторону движения, составим уравнение Лагранжа:
 = Q. (1)
= Q. (1)
Определим кинетическую энергию Т системы, равную сумме энергий всех тел:
T = T1 + T2 + T3. (2)
Так как груз 1 движется поступательно, шкив 2 вращается вокруг неподвижной оси, а каток 3 движется плоскопараллельно, то
 (3)
(3)
поскольку масса шкива считается распределенной по внешнему ободу, а каток – сплошной (его радиус обозначим r3), моменты инерции тел 2 и 3 равны:
 . (4)
. (4)
Все скорости, входящие в выражения T1, T2 и T3 , выразим через обобщенную скорость  , равную V1. Если учесть, что V1 = w2r2, a
, равную V1. Если учесть, что V1 = w2r2, a  = = w2R2 и что точка К является для катка 3 мгновенным центром скоростей, то получим
= = w2R2 и что точка К является для катка 3 мгновенным центром скоростей, то получим
 (5)
(5)
Подставляя величины (5) и (4) в равенства (3), а затем значения T1, T2 , T3 в равенство (2), найдём окончательно, что
T =  . (6)
. (6)
Так как здесь Т зависит только от  , то
, то
 (7)
(7)
Найдём обобщенную силу Q. Для этого изобразим силы, совершающие при движении системы работу, т.е. силы  и момент сил сопротивления М2, направленный против вращения шкива. Затем сообщим системе возможное (элементарное) перемещение, при котором обобщенная координата х получает положительное приращение dx, и покажем перемещения каждого из тел; для груза 1 это будет dS1 = dx, для шкива 2 – поворот на угол dj2 , для катка 3 – перемещение dS3 его центра. После этого вычислим сумму элементарных работ сил и момента на данных перемещениях.
и момент сил сопротивления М2, направленный против вращения шкива. Затем сообщим системе возможное (элементарное) перемещение, при котором обобщенная координата х получает положительное приращение dx, и покажем перемещения каждого из тел; для груза 1 это будет dS1 = dx, для шкива 2 – поворот на угол dj2 , для катка 3 – перемещение dS3 его центра. После этого вычислим сумму элементарных работ сил и момента на данных перемещениях.
Получим
Σ dAk = P1×dS1 – M2×dj2 – P3×sin a×dS3 . (8)
Выразим все возможные перемещения через dx. Учтя, что зависимости между элементарными перемещениями здесь аналогичны зависимостям (5) между соответствующими скоростями, получим
dS1 = dx; dj2 =  ; dS3 = R2 × dj2 =
; dS3 = R2 × dj2 =  . (9)
. (9)
Подставляя эти значения в равенство (8) и вынося  за скобки, найдём, что
за скобки, найдём, что
Σ dAk =  dx. (10)
dx. (10)
Коэффициент при  в полученном выражении и будет обобщенной силой Q.
в полученном выражении и будет обобщенной силой Q.
Следовательно,
Q = P1 –  – 2P3sin a, или Q = 1,6Р. (11)
– 2P3sin a, или Q = 1,6Р. (11)
Подставляя найденные величины (7) и (11) в уравнение (1), получим
60  = 1,6Р.
= 1,6Р.
Отсюда находим искомое ускорение a 1 =  .
.
О т в е т: а 1 = 0,027g.
Примечание. Если в ответе получится а < 0 (или e < 0),то это означает, что система движется не в ту сторону, куда было предположено при решении задачи. Тогда направление момента М против вращения шкива изменится. В этом случае необходимо еще раз составить уравнения (8), (11) и заново определить величину Q.
Date: 2015-09-03; view: 773; Нарушение авторских прав