Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Кинематическая энергия манипулятора
|
|
Зная скорость произвольной точки каждого звена манипулятора, найдём кинетическую энергию i -го звена.
Обозначим через  кинетическую энергию i -го звена (i =1, 2, …, n). Пусть
кинетическую энергию i -го звена (i =1, 2, …, n). Пусть  кинетическую энергию элемента массы dm i -го звена. Тогда:
кинетическую энергию элемента массы dm i -го звена. Тогда:
 . (10-1)
. (10-1)
Здесь вместо скалярного произведения используется оператор  (след матрицы
(след матрицы  ), что в дальнейшем позволит перейти к матрице инерции
), что в дальнейшем позволит перейти к матрице инерции  i -го звена.
i -го звена.
Подставляя в выражение (10-1) значение  из равенства (9-20), получим выражение для кинетической энергии элемента массой dm:
из равенства (9-20), получим выражение для кинетической энергии элемента массой dm:
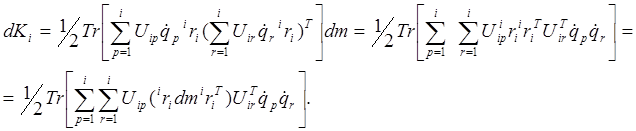 (10-2)
(10-2)
Матрица  характеризует положение точки i -го звена относительно базовой системы координат, обусловленное изменением координаты
характеризует положение точки i -го звена относительно базовой системы координат, обусловленное изменением координаты  .
.
Данная матрица одинакова для всех точек i -го звена и не зависит от распределения массы в этом звене, также как и  . Таким образом:
. Таким образом:
 . (10-3)
. (10-3)
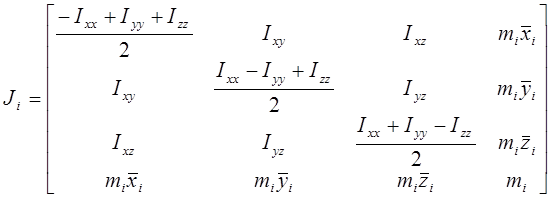
Интегральный член в скобках представляет собой матрицу инерции  i -го звена:
i -го звена:
 . (10-4)
. (10-4)
Преобразуя выражения, получим:
 , (10-5)
, (10-5)
где  однородные координаты центра масс i -го звена в i -й системе координат;
однородные координаты центра масс i -го звена в i -й системе координат;
 - тензор инерции, где i, j, k принимают значения x i, y i, z i (оси i -ой системы координат), а
- тензор инерции, где i, j, k принимают значения x i, y i, z i (оси i -ой системы координат), а  - символ Кроникера.
- символ Кроникера.
Формулу (6-26) можно также записать в виде:
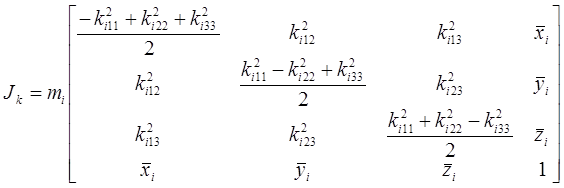 . (10-6)
. (10-6)
Здесь  и j, k =1, 2, 3, а
и j, k =1, 2, 3, а 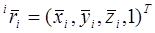 - радиус вектор центра масс i -го звена в системе координат i -го звена. Таким образом, полная кинетическая энергия манипулятора равна:
- радиус вектор центра масс i -го звена в системе координат i -го звена. Таким образом, полная кинетическая энергия манипулятора равна:
 . (10-7)
. (10-7)
Отметим, что величина J i (i =1, 2,…, n) зависит только от распределения массы i -го звена в i -й системе координат и не зависит ни от положения, ни от скорости звеньев. Это позволяет однажды вычислив матрицу J i, использовать полученное значение в дальнейшем для вычисления кинетической энергии манипулятора.
Date: 2015-08-15; view: 508; Нарушение авторских прав