Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Технический оптимум при настройке регуляторов тока и скорости
|
|
Такая настройка применяется для систем второго порядка, ее называют также настройкой на технический оптимум. Термин обусловлен тем, что если характеристический полином системы второго порядка представить в канонической форме, т.е. в виде
(7.5) D (p)= T 12 p 2+2ζ T 1 p +1,то при 2ζ=  обеспечивается переходный процесс, близкий к оптимальному, при котором будет небольшое перерегулирование и относительно высокое быстродействие.
обеспечивается переходный процесс, близкий к оптимальному, при котором будет небольшое перерегулирование и относительно высокое быстродействие.
Рассмотрим сначала простейшую систему, представленную в предыдущем пункте (двигатель питается от источника тока). В относительных единицах ее структурная схема представлена на рис. 7.3. Если коррекцию осуществлять путем подбора передаточной функции регулятора W р(p), обеспечивающей оптимальный переходный процесс, то звенья с постоянными времени T μ и T о можно отнести к неизменной части системы, обозначив ее передаточную функцию через W н(p). Учитывая введенное обозначение, запишем передаточную функцию разомкнутого контура
(7.6) W (p)= W р(p) W н(p),где
(7.7)  ,
,
(7.8)
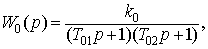
 W о(p) – передаточная функция объекта регулирования.В замкнутом состоянии привод будет описываться передаточной функцией
W о(p) – передаточная функция объекта регулирования.В замкнутом состоянии привод будет описываться передаточной функцией
(7.9)
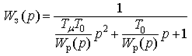 Которая, в соответствии с нашим желанием обеспечить технический оптимум (7.5), за счет выбора передаточной функции регулятора W р(p), должна быть приведена к следующему виду
Которая, в соответствии с нашим желанием обеспечить технический оптимум (7.5), за счет выбора передаточной функции регулятора W р(p), должна быть приведена к следующему виду
(7.10)
 Из условия тождественного равенства передаточных функций (7.9) и (7.10) справедливы соотношения для передаточной функции синтезируемого регулятора
Из условия тождественного равенства передаточных функций (7.9) и (7.10) справедливы соотношения для передаточной функции синтезируемого регулятора
(7.11) W р(p)= T μ T о/ T 12 и W р(p)= T о / ( T 1),где T 1 – свободная для выбора постоянная времени. Попробуем выбрать её так, чтобы компенсировать влияние большой постоянной времени T о. Для этого введем подстановку T 1= aT μ и перепишем соотношения (7.11) в виде W р(p)= T о/(a 2 T μ) и W р(p)= T о / ( aT μ).
При a = , имеем
(7.12)
W р(p)= T о/(2 T μ)= k р.Такой регулятор называют пропорциональным (П-регулятором). Если прейти от относительных единиц к абсолютным, то согласно (7.3.в) получим
(7.13)
k р= T о/(2 T μ k п k о k ос).Таким образом, если передаточную функцию регулятора выбрать согласно (7.13), мы обеспечим настройку на оптимум по модулю и передаточная функция замкнутой системы, получит вид (7.10). Передаточную функцию настроенной на оптимум по модулю разомкнутой системы получим по выражению
(7.14)
 Смысл термина настройки на оптимум по модулю в том, что при этом стремятся в широкой полосе частот сделать модуль частотной характеристики замкнутого контура близким к единице.Переходный процесс в системе при ступенчатом управляющем воздействии показан на рис. 7.5.а, кривая А. Выходная величина в первый раз достигает установившегося значения через время t =4.7 T μ, перерегулирование составляет 4.3 %. Так как влияние постоянной времени объекта T о было скомпенсировано коррекцией, длительность переходного процесса от нее не зависит, а определяется только малой постоянной времени T μ.
Смысл термина настройки на оптимум по модулю в том, что при этом стремятся в широкой полосе частот сделать модуль частотной характеристики замкнутого контура близким к единице.Переходный процесс в системе при ступенчатом управляющем воздействии показан на рис. 7.5.а, кривая А. Выходная величина в первый раз достигает установившегося значения через время t =4.7 T μ, перерегулирование составляет 4.3 %. Так как влияние постоянной времени объекта T о было скомпенсировано коррекцией, длительность переходного процесса от нее не зависит, а определяется только малой постоянной времени T μ.
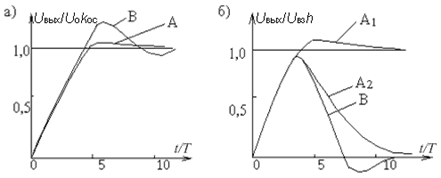
Рис. 7.5. Переходные процессы в приводе при различных настройках регулятора
Теперь предположим, что двигатель питается от преобразователя напряжения. В этом случае, в первом приближении, постоянную времени T я можно не учитывать. Тогда передаточную функцию объекта по управлению можно представить в виде
(7.15)  Подставим W о(p) из (7.15) в (7.7) и получим передаточную функцию разомкнутой системы
Подставим W о(p) из (7.15) в (7.7) и получим передаточную функцию разомкнутой системы
(7.16)  Приравнивая правые части выражений (7.14) и (7.16), найдем передаточную функцию регулятора, при которой обеспечивается настройка системы на технический оптимум,
Приравнивая правые части выражений (7.14) и (7.16), найдем передаточную функцию регулятора, при которой обеспечивается настройка системы на технический оптимум,
 Учитывая полученное выше уравнение для оптимального передаточного коэффициента системы (7.13), представим полученную передаточную функцию стандартным пропорционально-интегральным звеном
Учитывая полученное выше уравнение для оптимального передаточного коэффициента системы (7.13), представим полученную передаточную функцию стандартным пропорционально-интегральным звеном
(7.17)  где τр= T о, а k р определяется по (7.13). Такой регулятор называют пропорционально-интегральным (ПИ-регулятор).Если двигатель питается от преобразователя напряжения, и мы учитываем постоянную времени якорной цепи, то согласно (2.35.а) передаточная функция объекта по управлению имеет вид
где τр= T о, а k р определяется по (7.13). Такой регулятор называют пропорционально-интегральным (ПИ-регулятор).Если двигатель питается от преобразователя напряжения, и мы учитываем постоянную времени якорной цепи, то согласно (2.35.а) передаточная функция объекта по управлению имеет вид
(7.18)
 где k о=1/(K Φ), T о1= T м, T о2= T я.По аналогии с предыдущим случаем найдем
где k о=1/(K Φ), T о1= T м, T о2= T я.По аналогии с предыдущим случаем найдем
(7.19) 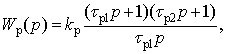 где τр1= T о1, τр2= T о2, а k р определяется по (7.13). Такой регулятор называют пропорционально интегрально дифференциальным (ПИД-регулятор).
где τр1= T о1, τр2= T о2, а k р определяется по (7.13). Такой регулятор называют пропорционально интегрально дифференциальным (ПИД-регулятор).
Date: 2015-08-15; view: 6728; Нарушение авторских прав