Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Нарисовать и объяснить механические характеристики электропривода с двигателем постоянного тока независимого возбуждения при изменении напряжения
|
|
Схема включения ДПТ с независимым возбуждением (ДПТ с НВ) приведена на рис. 2.1. Для ДПТ с НВ справедлива система уравнений, описывающая его статическое состояние:
U=IR+E
Е=с  ; (2.1)
; (2.1)
М=сI;
Решая первые два уравнения в системе (2.1) относительно Е, можно получить известное уравнение электромеханической характеристики ДПТ
 , (2.2)
, (2.2)
которое определяет зависимость = f(I).С учетом третьего уравнения в (2.1) уравнение (2.2) можно переписать в виде зависимости w=f(M) которая определяет механическую характеристику ДПТ:  , (2.3) или
, (2.3) или  (2.4)
(2.4)
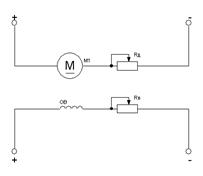 Рис. 2.1. Схема включения ДПТ с НВкоторое определяет зависимость =f(I).
Рис. 2.1. Схема включения ДПТ с НВкоторое определяет зависимость =f(I).
Данное уравнение механической характеристики определяет зависимость скорости вращения от момента на валу двигателя, т.к. в статике вращающий момент равен моменту сопротивления Мс на валу ДПТ, то это уравнение определяет зависимость отМс, прикладываемого к валу.

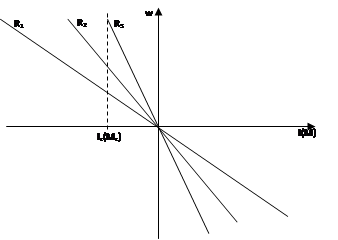
Из анализа уравнения электромеханической характеристики (формула 2.2) видно, что она может быть представлена прямой линией (рис. 2.2) при неизменных напряжении U, магнитном потоке Ф, создаваемом ОВ и сопротивлением якорной цепи R. ЕслиU = Uном, Ф = Фном и Rд = 0, электромеханическая характеристика называется естественной. При изменении хотя бы одного из указанных параметров электромеханическая характеристика называется искусственной. Таким образом, можно отметить, что ДПТ с НВ обладает лишь одной естественной характеристикой и множеством искусственных.
Нетрудно видеть, что в случае, если I=0, имеет место режим идеального холостого хода и при этом  =
=  = U/кФ == U/c, т.е.
= U/кФ == U/c, т.е.  и
и  .
.
С введением Rд в цепь якоря жесткость электромеханической характеристики уменьшается, что и видно из рисунка 2.2.
Из выражения (2.4) следует, что графически механическая характеристика ДПТ с НВ может быть представлена прямой линией с двумя характерными точками - скоростью холостого хода wо и моментом короткого замыкания Мкз, который также называется пусковым. Величина Мкз определяется как Мкз = сIкз= кФU/R. С введением добавочного сопротивления Rд в цепь якоря жесткость механических характеристик также падает, что с успехом используется при регулировании скорости вращения.
Уравнения механической характеристики можно переписать в виде:
 , (2.6)
, (2.6)
где  = MR/ (кФ)
= MR/ (кФ)  = MR/c - перепад скорости, aR = Rя+ Rд.
= MR/c - перепад скорости, aR = Rя+ Rд.
|
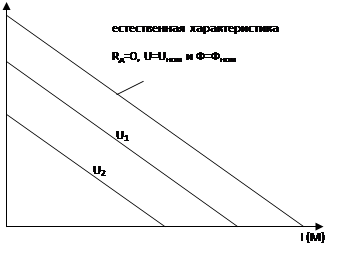
Рис. 2.3. Механические характеристики ДПТ с НВ при различных напряжениях на якоре Uном>U1>U2
Нарис. 2.4 нижняя характеристика соответствует номинальному потоку возбуждения Фн. Если при этом добавочное сопротивление в якорной цепи Rд равно 0 и якорь запитывается номинальным напряжением Uн,то эта характеристика будет естественной. При уменьшении величины потока возбуждения угловые скорости вращения холостого хода возрастают. Ток короткого замыкания при этом остается неизменным.
. На рис. 2.5 представлены механические характеристики для различных значений потоков. Практически этот способ используется только для регулирования угловой скорости вращения вверх от основной. Экономически целесообразно регулировать угловую скорость вращения при токе якоря равном номинальному, но при этом номинальные значения моментов будут различными для различных значений величины потока Ф. Точки, соответствующие номинальным моментам двигателя будут лежать на гиперболической кривой, обозначенной пунктирной линией на рис. 2.5.

Рис. 2.4. Характеристики ДПТ с НВ при изменении магнитного потока 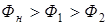 .
.
|

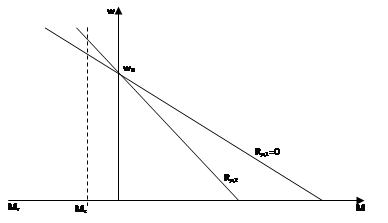 Рис. 2.5. Характеристики ДПТ с НВ при изменении магнитного потока .
Рис. 2.5. Характеристики ДПТ с НВ при изменении магнитного потока .
Рис. 2.6. Механические характеристики ДПТ в режиме рекуперативного торможения (Rд2>Rд1).
Но данный режим работы ДПТ может применяться только при работе электродвигателя на скоростях больших скорости идеального холостого хода w0.
Уравнение механической характеристики для этого режима запишется как
=МтR/с2 (2.10)
Нарис. 2.8 представлены механические характеристики режима динамического торможения.
 Если у ДПТ, работающего в двигательном режиме изменить полярность напряжения на обмотке якоря на противоположную, то знак тока якоря I изменится на противоположный в соответствии с выражением I=-(U+E)/R. Двигатель переходит в тормозной режим, и его механическая характеристика изображается во 2 квадранте. При этом происходит интенсивное торможение и скорость вращения двигателя падает до нуля. Если в этот момент времени обмотку якоря не отключить от сети, то направление вращения изменится на противоположное, т.е. двигатель реверсируется.
Если у ДПТ, работающего в двигательном режиме изменить полярность напряжения на обмотке якоря на противоположную, то знак тока якоря I изменится на противоположный в соответствии с выражением I=-(U+E)/R. Двигатель переходит в тормозной режим, и его механическая характеристика изображается во 2 квадранте. При этом происходит интенсивное торможение и скорость вращения двигателя падает до нуля. Если в этот момент времени обмотку якоря не отключить от сети, то направление вращения изменится на противоположное, т.е. двигатель реверсируется. 
Рис. 2.9. Характеристики ДЛТ с НВ в режиме тормозного спуска.
Режим тормозного спуска широко применяется в грузоподъемных механизмах для опускания грузов.
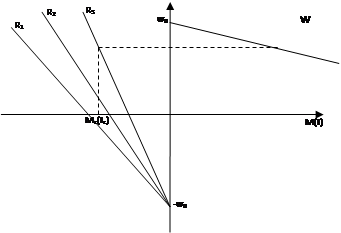
Рис. 2.10. Характеристики ДПТ с НВ в режиме торможения противовключением при изменении полярности питающего напряжения (R3>R2>R1).
Date: 2015-08-15; view: 2342; Нарушение авторских прав