Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Модель объекта управления
|
|
Структура управления (система управления)

Функции системы управления:
1. Измерение физических величин;
2. Контролирование;
3. Регулирование;
4. Оптимизация.
Объект управления всегда является составной частью системы управления. Поэтому его модель должна отражать взаимодействия объекта с подсистемой системы управления так и с окружающей средой.
Модель объекта управления должна состоять из следующих основных составляющих:
1. Модель преобразующих каналов объекта, отражающая влияние изменений всех входных (управляющих и внешних) воздействий на изменение выходных воздействий объекта (Рисунок 2):
|

Рисунок 2 - Модель преобразующих каналов объекта
Примером таких моделей, статических и динамических являются выражения (11) и (14).
2. Модель внешних воздействий, как контролируемых, так и неконтролируемых.
Моделируемый объект управления является составной частью собственной системы управления. Зачастую эта система управления является составной частью другой системы (более верхнего уровня), тогда модели предыдущих (по производственному циклу) объектов и систем можно использовать в качестве моделей внешних воздействий, при условии, что выходные воздействия этих предыдущих систем являются входными воздействиями моделируемого нами объекта. Если нет таких объектов или это сложно осуществить, то в данном случае речь идет о построении модели временных рядов данных. Модель временного ряда внешних воздействий должна отображать свойства натурного временного ряда, характеризующего изменения натурных внешних воздействий W. Один из вариантов формирования временного ряда внешних воздействий (модель внешних воздействий) имеет следующий вид (Рисунок 3):
Рисунок 3 - Модель внешних воздействий
МБ1,2 – масштабирующие блоки;
ГТФ – генератор типовых функций, реализующий детерминированные составляющие временного ряда Wд(t);
ГСЧ – генератор случайных чисел, вырабатывающий отклонение
 по заданному закону распределения вероятностей;
по заданному закону распределения вероятностей;
К1, К2 – ключи;
Ку – ключ управления.
Часто между ГСЧ и МБ ставят формирующие фильтры (фф) для придания временному ряду заданных статистических свойств.
В последнее время, в качестве моделей внешнего воздействия используют нелинейные рекуррентные модели динамического хаоса.
3. Модель измерений.
Поскольку процесс измерения всегда сопровождается погрешностью, то при построении модели объекта это необходимо учитывать.
В простейшем случае эту модель можно записать в виде следующей суммы:
Yu(t) = Yд(t) +  и(t), (17)
и(t), (17)
где Yu(t) – измеренное значение выходной величины;
Yд(t) – действительное значение выходной величины;
 и(t) – погрешность измерения.
и(t) – погрешность измерения.
4. Модель исполнительных блоков, реализующих управляющие команды, поступающие с выхода управляющих устройств.
Структурно модель исполнительного блока может выглядит как и модель измерения. В простейшем случае она выглядит также как и выражение (17).
Вернемся к модели внешних воздействий. Мы описали один из вариантов моделей контролируемых внешних воздействий. Возникает вопрос, можно ли и если можно, то как построить модель неконтролируемых внешних воздействий?
Установить наличие действующих на объект неконтролируемых возмущений возможно 2-мя путями.
1) Экспериментальный путь. Для этого необходимо установить все контролируемые входные воздействия (управляющие и внешние) на какой-то постоянный уровень, то есть провести активный эксперимент над объектом, зарегистрировать изменение выходных воздействий и проанализировать их. Наличие колебаний относительно установившегося режима функционирования объекта или относительно опорной траектории выходных воздействий (если объект не имеет установившегося состояния, в частности, обладает накопительными свойствами) характеризует действие на объект неконтролируемых возмущений.
Рассмотрим задачу определения неконтролируемых возмущений на объекте.
Дано:
Судя по структуре, видно, что это ОУ, подверженный влиянию неконтролируемых возмущений.
Предположим, что реализован активный эксперимент, при котором:
U (t+õ) = U0 , õ>0
Wk (t+õ) = Wko, õ>0
Переход к постоянному значению произошел скачкообразно.
Т.е входные воздействия ОИ, начиная с момента t+õ является постоянным.
Требуется: нарисовать качественно-характеристические изменения Y(t) при наличии и при отсутствии Wн(t), как для объектов, обладающих свойством самовыравнивания, так и нет.
Y(t)
Y(t)
С самовыравниванием, когда присутствуют неконтролируемые возмущения:
Без самовыравниванием, когда присутствуют неконтролируемые возмущения:
С самовыравниванием, когда отсутствуют неконтролируемые возмущения:
Без самовыравниванием, когда отсутствуют неконтролируемые возмущения:
При этом уровень отклонений от базовых траекторий характеризует и уровень наличия неконтролируемых возмущений. И чем больше этот уровень, тем выше степень неопределенности в оценке поведения такого объекта. Полученную таким образом оценку колебаний выходного воздействия обозначим ywн(t) и будем называть приведенным к выходу объекта возмущением.
Таким образом, приведенное к выходу объекта возмущение характеризует в масштабе изменения выходного воздействия интегральный эффект всех действующих на объект неконтролируемых возмущений. Однако практически провести такой активный эксперимент невозможно, поэтому используют второй путь.
2) Расчетный путь (моделирование)
Для этого используются следующие соотношения, записанные в общем виде. Предварительно примем следующие обозначения (рисунок 4):
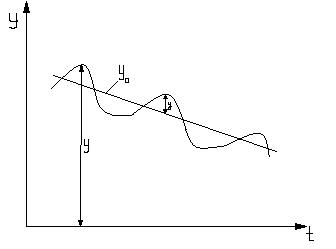
Рисунок 4 - Расчетный путь установления наличия неконтролируемых возмущений
Y(i) = Y0(i) + y(i); (18)
y(i) = yu(i) + yw(i) + ywн(i); (19)
yu(i) =  ;
;  - модель в малом преобразующих каналов (20)
- модель в малом преобразующих каналов (20)
более точно отражают то, что объект динамический.
yw =  ;
;  (21)
(21)
u(i) = U(i) – U0(i); (22)
w(i) = W(i) – W0(i). (23)
Классическая схема расчета приведенных возмущений, предложенная Ротачом, записывается следующим образом:
ywн(i) = Y(i) – Y0(i) – yu(i) – yw(i); (24)
Y0(i) =  ; (25)
; (25)
yu(i) =  ; (26)
; (26)
yw(i) =  ; ; (27)
; ; (27)
u(i) = U(i) – U0(i); (28)
wk(i) = Wk(i) – Wk0(i); (29)
где lu, lw – дискретное запаздывание по каналам преобразования регулирующих и внешних возмущающих воздействий;
j – фиктивная переменная, означающая память динамического объекта.
Ф {∙} – модель внутреннего механизма процесса или модель объекта в большом диапазоне изменения входных и выходных воздействий.
В общем случае можно указать следующие факторы, обуславливающие функционирование натурных объектов в условиях неопределенности:
· влияние неконтролируемых внешних воздействий;
· слабая изученность объекта (отсутствие математической модели внутренних механизмов процесса) Ошибки измерения и отсчета могут входить в состав неконтролируемых внешних воздействий;
· погрешности измерений физических величин и передачи сигналов.
В рассматриваемой нами схеме расчета приведенных к выходу объекта возмущений предполагается, что объект хорошо изучен, то есть имеется адекватная математическая модель внутренних механизмов процессов.
Для вычисления приведенных к выходу объекта возмущений, если отсутствует математическая модель внутренних механизмов процесса  можно предложить:
можно предложить:
1. Согласованное выделение опорных уровней входных и выходных воздействий не с помощью математических моделей внутренних механизмов процесса, а с помощью сглаживающих фильтров типа РЭС или ЭС с большой инерционностью. То есть выбирается  достаточно малой величины, в пределах (0; 0,1). Согласованное сглаживание здесь понимается так, чтобы имело место хотя бы приближенное соответствие между сглаженными (опорными) значениями входных воздействий и сглаженными (опорными) значениями выходных воздействий.
достаточно малой величины, в пределах (0; 0,1). Согласованное сглаживание здесь понимается так, чтобы имело место хотя бы приближенное соответствие между сглаженными (опорными) значениями входных воздействий и сглаженными (опорными) значениями выходных воздействий.
Согласованное сглаживание здесь означает, что сглаживание выходных воздействий должно осуществляться фильтрами большей инерционности, чем для входных (с меньшим значением коэффициента сглаживания  ). Причем это уменьшение должно осуществляться с учетом динамических свойств преобразующих каналов для соответствующих входных воздействий, а конкретнее, с учетом их инерционности. Другими словами, для этого необходимо располагать функциональными математическими моделями соответствующих преобразующих каналов (Рисунок 5).
). Причем это уменьшение должно осуществляться с учетом динамических свойств преобразующих каналов для соответствующих входных воздействий, а конкретнее, с учетом их инерционности. Другими словами, для этого необходимо располагать функциональными математическими моделями соответствующих преобразующих каналов (Рисунок 5).
|
Рисунок 5 - Функциональная математическая модель преобразующих каналов
2. В инженерной практике оценки эффектов неконтролируемых внешних возмущений можно использовать схемы аналогов приведенных к выходу возмущений, например, оценивать не приведенное к выходу возмущение, а приведенное выходное воздействие в виде:
Yпр(t) = Y0(t0) + ywн(t) (30)
Date: 2015-07-22; view: 2106; Нарушение авторских прав