Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Влияние нелинейности объекта управления и пути уменьшения
|
|
Объекты управления в полуавтоматических системах представляют собой совокупность динамических элементов, которые осуществляют некоторое функциональное преобразование между входным и выходным сигналом. Вид динамических элементов определяет вид системы, в состав которой они входят. Влияние на эффективность слежения параметров объекта управления, описываемого линейными дифференциальными уравнениями первого и второго порядка с постоянными коэффициентами, рассмотрено ранее [4].
Большой класс, имеющий широкое распространение на практике, составляют нелинейные системы управления. Нелинейной называется система, у которой хотя бы для одного элемента не выполняется принцип суперпозиции. Так, например, если объект управления содержит механические передачи или гидравлические приводы, то имеет место момент сопротивления управляющему усилию, вызванный моментами сухого и вязкого трения. Моделью такого явления служит так называемая зона нечувствительности.
Процессы, протекающие в нелинейных системах, и их собственные движения гораздо сложнее процессов и движений в линейных системах. Особые трудности представляет исследование функционирования полуавтоматических нелинейных систем управления, так как до настоящего времени не изучены вопросы, связанные с особенностями деятельности в них человека-оператора.
Для исследования влияния нелинейности характеристик объекта управления накачество выполнения слежения был поставлен лабораторный эксперимент. В качестве модели операторской деятельности использовалось одномерное компенсаторное слежение (рис. 1). 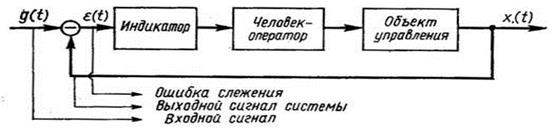
Входными сигналами, поступающими на систему, являлись гармонические колебания с постоянной амплитудой и возрастающей с шагом 0,05 Гц частотой, изменяющейся от, 0,1 Гц до срыва слежения. Расстояние от глаз испытуемого до экрана индикатора составляло 0,8 м. Размах колебания луча индикатора — 0,08 м. Слежение осуществлялось по вертикальной оси.
Исполнительное устройство представляло собой незагруженную потенциометриче-скую ручку управления с линейной рабочей характеристикой. Эксперимент проводился 1 при дневном освещении. Объект управления, содержащий нелинейность типа зоны нечувствительности, моделировался на аналоговой вычислительной машине и включался в контур управления. Величина зоны нечувствительности ос изменялась в пределах от ±5 до ±15 В с шагом ±5 В. Диапазон амплитуды управляющих движений оператора составлял ±30 В. Входной сигнал, ответная реакция оператора и ошибка слежения записывались на магнитографе и самопишущем приборе.
Наличие зоны нечувствительности в характеристике объекта управления или исполнительного устройства приводит к тому, что в интервале ее действия а никакое управляющее движение оператора не приводит к соответствующему перемещению луча на экране индикатора.
Date: 2016-11-17; view: 386; Нарушение авторских прав