Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Принцип векторного управления
|
|
можно сформулировать следующим образом: Первоначально система дифференциальных линейных уравнений трёхфазного двигателя преобразуется в систему уравнений обобщённой двухфазной машины, которая имеет две фазы (расположенные пространственно под 90° относительно друг друга) на статоре и две фазы на роторе, также взаимно расположенных. Затем все вектора, описываемые данной системой проецируются на произвольно вращающуюся ортогональную систему координат, с началом на оси ротора, при этом наибольшая простота уравнений получается при вращении системы координат со скоростью поля машины, кроме того при таком представлении уравнения вырождаются и становятся похожими на уравнения ДПТ, проецирование всех векторов на направление поля машины отражается в названии этого метода — «ориентирование по полю». Фактически вторым этапом формирования величин, ориентированных по полю — это замена обмоток двухфазной обобщённой машины (две на статоре и две на роторе) одной парой взаимно перпендикулярных обмоток, вращающихся синхронно с полем. Кроме характеристик, близких к характеристикам ДПТ, АДКЗ с ориентированием по полю имеет предельно допустимое быстродействие при управлении моментом в режиме поддержания постоянства потокосцепления.
При этом могут быть два варианта метода:
· ориентирование по полю ротора
· ориентирование по полю главного потокосцепления
При практической реализации первого метода необходимо определить направление и угловое положение вектора потокосцепления ротора двигателя. Ортогональные оси d, q (в отечественной литературе для асинхронных машин применяют оси x, y) направляют так, что ось d совпадает с направлением вектора потокосцепления ротора. Вектор напряжения статора двигателя регулируют в осях d, q. Составляющая напряжения по оси d регулирует величину тока статора по оси d.
Устройства с управлением по вектору главного потокосцепления двигателя, в нашей стране стали именоваться векторными системами. При использовании устройства управления по вектору главного потокосцепления и стабилизации модуля главного потокосцепления двигателя во всех режимах работы исключается чрезмерное насыщение магнитной системы, упрощается структура управления АД. Для составляющих вектора главного потокосцепления (по осям α, β статора) возможно прямое измерение, например, с помощью датчиков Холла, устанавливаемых в воздушном зазоре двигателя.
17. Синтез векторной системы управления асинхронным двигателем методом подчинённого управления

Схема выполнена на основе принципа подчиненного регулирования и содержит три контура:
1) скорости (внешний); содержит датчик скорости BR и регулятор скорости вращения (момента) AR;
2) потокосцепления (магнитного потока) с регулятором потока Av|/Uψ и каналом ОС, имеющим выходную величину щ;
3) активной^и реактивной 4е составляющей вектора тока статора с регу-ляторами АА2 и АА1.
Сигнал ОС по току статора осуществляется датчиком тока UA, который измеряет фазные токи двигателя в двух фазах, например А и В, и вырабатывает сигналы uiaи ы,*. Для преобразования этих сигналов к неподвижной системе координат служит функциональный преобразователь U1, работающий в соответствии с формулами (8.32) прямых координатных преобразований cosф = Uфо/Uф, которые в преобразователе А2 позволяют перейти от непод-вижных координат ар αβк координатам XYпо noследующим формулам:
uia=uia,;
uiβ=1/√3 (uiα+uib).
Измерение потокосцепления может производиться с помощью различных устройств, например измерительной обмоткой укладываемой в теже пазы, что и силовая обмотка. Наибольшее распространение полу-чили датчики Холла, помещаемые в воздушный зазор двигателя. Сигна-лы датчика Uy преобразуются в функциональном преобразователе U2 по формулам (8.32) в сигналы ифаи Ыфр неподвижной системы координат. Полу-ченные величины необходимо преобразовать к системе координат XY вращающейся в пространстве со скоростью поля двигателя.
С этой целью в пореоброазователе D выделяется модуль потокосцеп-ления ротора
в виде соответствующего сигнала иф


 . (8.35)
. (8.35)
Сигналы напряжения ифа, «фр, Uix, uiyпропорциональны соответствующим физичес-ким величинам.
На вход регулятора потокосцепления UψАу подается разность сиг-налов задания потокосцепления мзфи ОС мф, т.е. «у.Ф = "з.ф - мФ, а на выходе Ау формируется сигнал задания тока статора по оси X, т.е. u3ix. Разность сигналов u3ix - Uix, проходя через регулятор тока АА1, превращается в сигнал и*ы.Аналогичные преобразования имеют место в канале управления по оси Y, заза исключением того, что здесь установлен регулятор скорости (момента) AR, выходной сигнал которого делится на сигнал модуля потокосцепления Uψмф для получения сигнала задания тока и по оси Y. На выходе регулятора АА2 составляющей тока статора по оси Г вырабатывается сигнал и!у, который вместе с сигналом и,* подается на входы Бблока А1, функционируетющего в соответствии с первыми двумя уравнениями (8.34). На выходе блока А1 получаем пре-образованные сигналыихи щ, в которых отсутствует взаимное влияние кон-туров регулирования составляющих токов по осям XylY. Управляющие сигналы их и иу, записанные во вращающейся системе координат XY, в координатном преобразователе A3 превращаются в сигналы управления ПЧ в неподвижной системе координат аВ αβпо уравнениям
Uix= uiαcosφ + uiβsinφ,;
Uyα= uxcosφ - uysinφ,
Uyβ= uxcosφ - uysinφ. (8.36)
Для управления силовыми ключами ПЧ в трехфазной системе координат необходимо с помощью АЧ получить сигналы иуаUУа, UУbиуь, UУcмусв соответствии с формулами обратного преобразования (8.33):
uyα=uyα,
 . (8.37)
. (8.37)
Благодаря координатным преобразованиям в системе векторного управления ЧЭП выделяют два канала регулирования: потокосцепления (магнитного потока) и скорости вращения (момента). В этом смысле система векторного управления аналогична ЭП постоянного тока с двухзонным регулированием скорости.
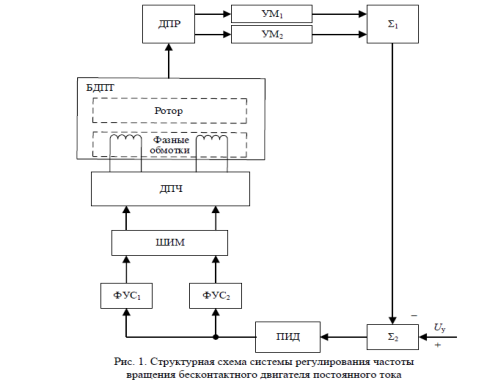
18.Построение системы управления частотой вращения бесконтактного двигателя постоянного тока

Date: 2016-11-17; view: 468; Нарушение авторских прав