Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Линейная непрерывная детерминированная модель многомерной динамической системы в переменных состояния
|
|
Представление в переменных состояния основано на использовании теоремы Коши об эквивалентности представления обыкновенного дифференциального уравнения (ДУ) n -го порядка в виде системы n уравнений 1-го порядка.
Рассмотрим в качестве примера переход от описания модели в виде линейного дифференциального стационарного уравнения 2-го порядка к описанию модели в виде системы двух уравнений 1-го порядка, а затем – к стандартной модели в виде переменных состояния.
Пример. Пусть некая динамическая система описывается линейным ДУ 2-го порядка с постоянными коэффициентами:

Обозначим:

и тогда можно выразить исходное уравнение в виде двух уравнений через состояния z1(t) и z2(t).

Запишем полученную систему из 2-х уравнений 1-го порядка в так называемом векторно-матричном виде:
где z (t) – вектор состояния; x (t) – вектор управления (в данном примере, в частности, x(t) – скаляр).
Это удобная форма записи, т.е. удобная модель динамической системы, использующая понятие переменных состояния zi(t). Такая модель позволяет проследить изменение во времени каждой из составляющих внутренних переменных системы и вывести условия ее управляемости и наблюдаемости (п. 2.7).
Состояние системы отделяет будущее от прошлого, содержит всю информацию о прошлом системы, необходимую для определения реакции на произвольный входной сигнал.
В общем случае n -го порядка исходного линейного ДУ можно записать векторно-матричное уравнение состояния системы

Здесь матрица А (n × n) называется матрицей объекта, а матрица В (n × m), где m – размерность вектора управления – матрицей управления. Такая форма уравнений, разрешенных относительно первых производных, называется стандартной формой.
Не всегда оказывается возможным измерить все состояния системы: z1, z2, …, zn, поэтому вводится уравнение наблюдения, которое позволяет описать, какие из состояний zi и какие из входов xi попадают в вектор наблюдаемых выходных переменных y (t):
 ,
,
где z (t) – вектор состояния системы; x (t) – вектор управления; С –
матрица наблюдения.
Уравнение наблюдения также является линейным, причем не дифференциальным, а алгебраическим.
В рассмотренном примере 2.4.1 матрица объекта А равна:

ее размерность равна (2 × 2).
Матрица управления В представляет собой вектор-столбец (2 × 1), поскольку вектор управления x(t) в этом примере – скаляр (1 × 1):

Матрица наблюдения С равна единичной матрице:
а матрица D – нулевой:
Уравнения состояния и наблюдения соответствуют структурной схеме (рис. 2.10), где матрицы A, B, C и D указаны как стационарные (с постоянными элементами), хотя в случае нестационарных линейных систем схема останется такой же. Знак ∫ обозначает на схеме блок интегрирования: действительно, на входе этого блока находится производная вектора состояния, а на выходе – сам вектор состояния z (t).
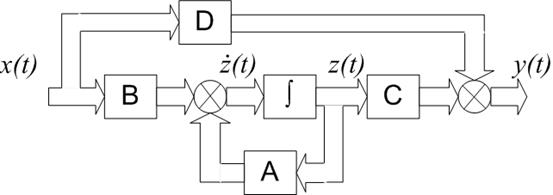
Рис. 2.10. Структурная схема модели линейной стационарной системы управления в переменных состояния
Очевидно, что использование модели переменных состояния для анализа многомерных систем требует привлечения теории матриц и линейных векторных пространств.
Более подробный материал по теории матриц можно найти в Приложении 1 в конце данного пособия.
Вопросы к разделу 2.4
- Какую информацию содержит вектор состояния системы?
- Какая теорема позволяет перейти от линейного дифференциального уравнения n -го порядка к векторно-матричному уравнению состояния?
- Что описывает уравнение состояния?
- Что описывает уравнение наблюдения?
- Какова размерность матрицы объекта?
- Какова размерность матрицы управления?
Date: 2016-02-19; view: 640; Нарушение авторских прав