Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Способы регулирования угловой скорости асинхронного двигателя
|
|
Асинхронный двигатель является наиболее массовым электрическим двигателем.
Эти двигатели выпускаются мощностью от 0,1 кВт до нескольких тысяч киловатт и
находят применение во всех отраслях хозяйства. Основным достоинством
асинхронного двигателя является простота его конструкции и невысокая
стоимость. Однако по принципу своего действия асинхронный двигатель в обычной
схеме включения не допускает регулирования скорости его вращения. Особое
внимание следует обратить на то, что во избежание значительных потерь
энергии, а, следовательно, для короткозамкнутых асинхронных двигателей во
избежание перегрева его ротора, двигатель должен работать в длительном режиме
с минимальными значениями скольжения.
Рассмотрим возможные способы регулирования скорости асинхронных двигателей (см.
рис.1). Скорость двигателя определяется двумя параметрами: скоростью вращения
электромагнитного поля статора ω0 и скольжением
s:

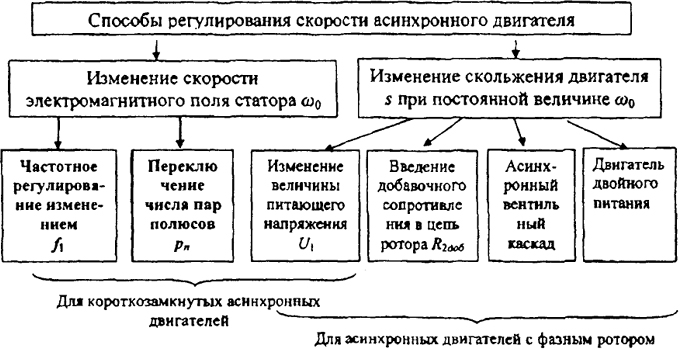
Рис.1. Классификация способов регулирования асинхронных двигателей
Исходя из (1) принципиально возможны два способа регулирования
скорости: регулирование скорости вращения поля статора и регулирование
скольжения при постоянной величине ω0.
Скорость вращения поля статора определяется двумя параметрами (см.3.3): частотой
напряжения, подводимого к обмоткам статора f1, и числом
пар полюсов двигателя рп. В соответствии с этим возможны
два способа регулирования скорости: изменение частоты питающего напряжения
посредством преобразователей частоты, включаемых в цепь статора двигателя
(частотное регулирование), и путем изменения числа пар полюсов двигателя.
Регулирование скольжения двигателя при постоянной скорости вращения поля
статора для короткозамкнутых асинхронных двигателей возможно путем изменения
величины напряжения статора при постоянной частоте этого напряжения. Для
асинхронных двигателей с фазным ротором, кроме того, возможны еще два
способа: введение в цепь ротора добавочных сопротивлений (реостатное
регулирование) и введение в цепь ротора добавочной регулируемой э.д.с.
посредством преобразователей частоты, включаемых в цепь ротора (асинхронный
вентильный каскад и двигатель двойного питания).
В настоящее время благодаря развитию силовой преобразовательной техники
созданы и серийно выпускаются различные виды полупроводниковых
преобразователей частоты, что определило опережающее развитие и широкое
применение частотно-регулируемого асинхронного электропривода. Основными
достоинствами этой системы регулируемого электропривода являются:
- плавность регулирования и высокая жесткость механических характеристик, что
позволяет регулировать скорость в широком диапазоне;
- экономичность регулирования, определяемая тем, что двигатель работает с
малыми величинами абсолютного скольжения, и потери в двигателе не превышают
номинальных.
Недостатками частотного регулирования являются сложность и высокая стоимость
(особенно для приводов большой мощности) преобразователей частоты и сложность
реализации в большинстве схем режима рекуперативного торможения.
Подробно принципы и схемы частотного регулирования скорости асинхронного
двигателя рассмотрены ниже.
Изменение скорости переключением числа пар полюсов асинхронного двигателя
позволяет получать несколько (от 2 до 4) значений рабочих скоростей, т.е.
плавное регулирование скорости и формирование переходных процессов при этом
способе невозможно.
Поэтому данный способ имеет определенные области
применения, но не может рассматриваться, как основа для построения систем
регулируемого электропривода.
Date: 2015-05-22; view: 1219; Нарушение авторских прав