Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Принципы построения замкнутых систем автоматического регулирования электропривода
|
|
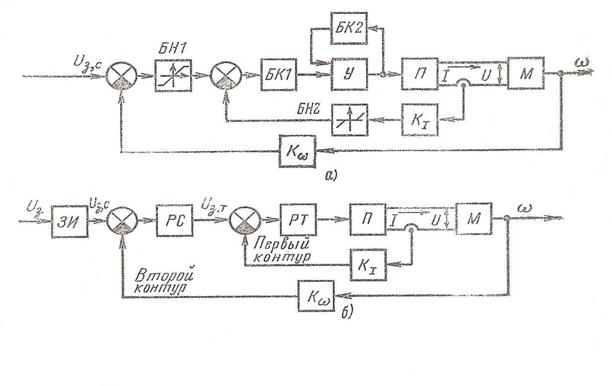
Рис. 1. Структурные схемы замкнутых систем регулирования.
а -с/общим/суммирующим/усилителем;
Наибольшее применение до недавнего времени получали два типа построения замкнутых систем регулирования: 1) с одним общим суммирующим усилителем (рис. 1, а); 2) с n последовательными суммирующими усилителями (рис. 1, 6) - так называемые системы подчиненного регулирования с последовательной коррекцией. Рассмотрим/их.
Отличительной особенностью систем, построенных по типу структурной схемы, приведенной на рис. 1а, является наличие одного суммирующего усилителя У, на вход (входы) которого подается алгебраическая сумма сигнала задающего и всех обратных связей жестких и гибких (суммирование может быть как электрическое, так и магнитное). Выходной сигнал усилителя; таким образом, зависит сразу от нескольких переменных, что делает практически невозможным регулирование какой-то одной переменной, независимо от других.
Придание системе требуемых динамических свойств при таком построении системы обычно достигается применением сложных корректирующих устройств, включаемых в цепь сигнала управления при малой мощности управления (блок БК1 на рис. 1, а -последовательная коррекция) или параллельно некоторым блокам системы (параллельная коррекция - гибкая отрицательная обратная связь, блок БК2 -- на рис. 1, а). При этом нельзя осуществить независимую настройку качества регулирования (например: статическая ошибка, динамическая ошибка, время регулирования, перерегулирование, степень затухания и др.) всех переменных. В целом получить требуемое высокое или оптимальное качество регулирования в таких системах крайне затруднительно, а в ряде случаев и невозможно.
Однако несмотря на указанные недостатки, системы, построенные по типу структурной схемы, приведенной на рис. 1, а, еще иногда находят место для применения либо из-за простоты реализации, либо в случаях, когда не предъявляются жесткие требования к качеству переходных процессов и не требуется раздельное регулирование переменных, либо когда относительно простыми средствами удается достигнуть требуемого качества процессов.
Date: 2015-05-22; view: 1196; Нарушение авторских прав