Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Жесткость механической характеристики электропривода. Установившиеся режимы
|
|
Для оценки формы механической характеристики вводится понятие ее жесткости. Под жесткостью характеристики подразумевают производную момента по скорости, т. е. 
Графически жесткость определяется как тангенс угла наклона между осью скоростей и касательной к данной точке механической характеристики (рис. 1.1):
5. 
где mМ и mw — масштабы соответственно момента и скорости, Н×м/мм и рад/с×мм.
Определение устойчивости установившегося режима по механическим характеристикам двигателя и механизма
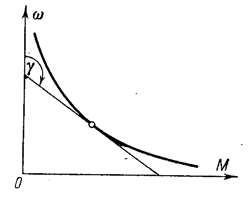
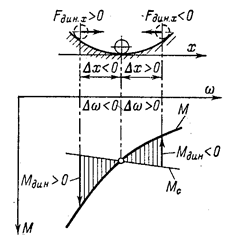
Рис. 1.1. Рис. 1.2.
Угол g отсчитывается по часовой стрелке от оси скоростей до касательной. Жесткость характеристик механизмов будем отличать дополнительно индексом «с», т. е. bс
Механические характеристики различных двигателей и механизмов существенно различаются по жесткости: для синхронных двигателей b = ¥; для асинхронных двигателей b = var ¹ 0; для двигателей постоянного тока с независимым возбуждением b = const < 0; для двигателя постоянного тока с последовательным возбуждением b = var < 0; для центробежного вентилятора или насоса bс = var> 0; для подъемной лебедки bс = 0.
Установившийся режим электропривода, характеризуемый неизменными моментом и угловой скоростью двигателя, можно рассматривать как состояние равновесия системы относительно координаты w. Как и всякое состояние равновесия, установившийся режим может - быть устойчивым и неустойчивым. Критерием устойчивости механических систем с одной степенью свободы является условие возникновения динамического усилия при выведении системы из состояния равновесия, возвращающего, систему в исходное положение. Другими словами, знак возникающего динамического усилия должен быть противоположен знаку приращения координаты, характеризующей выведение системы из состояния равновесия (рис. 1.2). Применительно к электроприводу можно сказать, что необходимым и достаточным условием устойчивости установившегося режима является противоположность знаков у приращения скорости, характеризующего выведение электропривода из равновесия, и у возникающего при этом динамического момента, т. е. 
Так как в окрестности точки установившегося режима при малых приращениях Dw механические характеристики могут быть приняты линейными, то DМ = bDw и DМс = bсDw
Следовательно, Мдин = DМ – DМс = (b – bс) Dw (*)
Тогда в соответствии с (*) условие устойчивости представляется в другой форме
b – bс < 0 или b < bс
На основании полученных условий устойчивости точки 1, 2 и 3 на рис. 1.3 относятся к устойчивой работе привода, а точка 4 — к неустойчивой работе.
6. 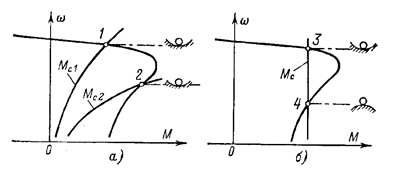
Рис.1.3 - Примеры установившихся режимов электропривода с моментами сопротивления
а – установившиеся режимы зависят от скорости; б – не зависят от скорости.
Date: 2015-05-22; view: 1586; Нарушение авторских прав