Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Глубокопогруженные крылья с механической системой автоматического управления
|
|
Идея использования простых механических систем для управления глубокопогруженными крыльями относится к самому начальному периоду создания СПК. Определенных практических успехов в области создания механизированных автоматически управляемых ГПК добился американский инженер X. Гук, который в период 1942—1951 гг. провел серию экспериментов на самоходных моделях и создал достаточно совершенную крыльевую систему с управляемыми крыльями (рис. 3.4). Показанные на схеме устройства являются самостоятельными для левого и правого бортов для двух раздельных крыльев, благодаря чему обеспечивается поперечная устойчивость при движении судна.
Элементы следящей системы (крыло 7 и пластина 6 ), вынесенные перед судном, обеспечивают изменение угла атаки носового крыла с некоторым упреждением, в результате чего нос судна успевает подняться над волной, которая и проходит под корпусом без соударения с ним; при прохождении впадины нос судна плавно опускается. Подъем и опускание носа, обусловливая дифферент судна, вызывают изменение угла атаки жестко закрепленного кормового крыла, в результате чего одновременно с носом (с некоторым сдвигом по фазе) и корма всплывает или опускается. Таким образом, все судно целиком всплывает или опускается, следуя при своем движении за профилем волны, но с меньшей амплитудой вертикального перемещения центра тяжести.
Система X. Гука получила в США некоторое распространение на морских СПК типа разъездных, прогулочных, спортивных и других небольших катеров. Недостатком этой системы является малая механическая прочность и большая вероятность повреждения следящего устройства.
С развитием электронных САУПК интерес к механическим системам снизился, и в течение относительно длительного периода (около 10 лет) совершенствованием их занимались мало. Но когда в результате анализа технико-экономической эффективности стало ясно, что применение сложных и дорогостоящих электронных САУПК во многих случаях не может быть оправдано, проектировщики СПК снова обратились к механическим системам. Так, в 1964 г. в Италии фирма «Родригес» (г. Мессина) начала серийную постройку небольших пассажирских морских СПК типа «Сифлайт», оборудованных механизированными управляемыми крыльями системы Пьеза.
Принцип действия управляемых крыльев по схеме Пьеза показан на рис. 3.5. Два раздельных носовых крыла, пересекающих свободную поверхность, укреплены на горизонтальных осях 2 и вместе с ними могут поворачиваться, изменяя_тем самым угол атаки. В плоскостях стоек 3 к осям 2 прикреплены рычаги 4, свободные концы которых упираются в пружины 5. Натяжение пружины может регулироваться штурвалами 6. Под воздействием гидродинамических сил Р (главный гидродинамический вектор) крыло стремится повернуться относительно оси 2, чему препятствует сжатие Т пружины 5. Очевидно, что система будет находиться в равновесии при условии Pt — Та. Если это условие при движении нарушается, то система вступает в действие. Например, уменьшилась скорость движения. Следовательно, уменьшилась Р, и условие равновесия превратилось в неравенство Pt < Та.
Поскольку Та больше Р1, крыло начинает поворачиваться так, что угол атаки увеличивается. Это будет происходить до тех пор, пока подъемная сила на крыле не достигнет своего расчетного значения, т. е. когда наступит равенство Р1 = Та. Таким образом, в системе Пьеза регулирование подъемной силы непосредственно связано с самим изменением ее величины. Процесс регулирования проходит в последовательности: изменение подъёмной силы — изменение угла атаки, а не наоборот, как в системе Гука. Поэтому крылья Пьеза не всплывают при замывании их вершиной волны
Рис. 3.5. Крыльевое устройство Пьеза.
1 — раздельные крылья; 2 — ось поворота крыльев; 3 — стойки крыльев, укрепленные на осях 2; 4 — рычаг поворота стойки крыла; 5 — пружина;
6 — штурвал натяжения пружины.;
и не погружаются при прохождении впадины волны, так как колебания подъемной силы (возрастание под вершиной волны и уменьшение под впадиной) снимаются соответствующим изменением углов атаки крыла. Крыло не следует за профилем волны, и тем самым исключает зарывание носа судна в волну, обеспечивает хорошую вертикальную стабилизацию с малой амплитудой вертикальной качки. Другим положительным свойством стабилизации по системе Пьеза с раздельными крыльями является поперечная устойчивость судна при движении лагом к волне (рис. 3.5, BJI1). Стабилизация осуществляется следующим образом: одно крыло, находящееся, под вершиной волны, отклоняется в корму с уменьшением угла атаки (подъемная сила будет уменьшаться), а другое - в нос с увеличением угла атаки (подъемная сила будет увеличиваться), и в результате судно стремится сохранить свое вертикальное положение. К преимуществам системы Пьеза следует также отнести следующие свойства:
· легкий выход судна на крыльевой режим без высокого «горба» сопротивления за счет больших углов атаки крыльев на малых скоростях;
· продольную остойчивость на попутном волнении, которую Трудно обеспечить на судах со стационарными неуправляемыми крыльями;
· надежность при достаточно простой конструкции.
В целом простая и надежная система управляемых крыльев Пьеза представляет практический интерес.
3.6 Вентилируемые крылья. Вентилируемыми называются крылья, подъемная сила которых через САУПК регулируется подачей воздуха к их рабочим поверхностям. К засасывающей поверхности, т. е. в зону пониженного давления, можно подавать («самотеком») атмосферный воздух, а в зону повышенного давления, т. е. к нагнетательной поверхности крыла, возможна подача лишь сжатого воздуха, что, конечно, представляется уже более сложной задачей практического осуществления аэрации крыла. Однако и на нагнетательной поверхности крыла не исключены случаи пониженного давления (например, под воздействием орбитальных движений частиц воды при попутном волнении), когда оказывается полезным простой подвод атмосферного воздуха.
При подаче воздуха в разреженную зону давление у поверхности крыла возрастает до атмосферного, характер обтекания профиля меняется, и подъемная сила падает. Если воздух будет подведен к нагнетательной стороне, подъемная сила крыла возрастает.
Изменение подъемной силы крыла при его вентилировании зависит от количества подаваемого воздуха, а также от места положения (по хорде крыла) рядов воздухоподводящих отверстий. Необходимое количество подаваемого воздуха может быть оценено коэффициентами расхода воздуха

где Q — объем воздуха, расходуемый на вентиляцию, м3/с;  - площадь вентилируемой (аэрируемой) части крыла, м2;
- площадь вентилируемой (аэрируемой) части крыла, м2;  - расчетная скорость судна, м/с.
- расчетная скорость судна, м/с.
Эксперименты и натурные данные показывают, что состояние полной аэрации или полного насыщения, когда достигается возможно максимальное снижение подъемной силы вентилированием, наступает при CQ = 0,0045. При этом суммарная площадь отверстий, подводящих воздух, должна составлять не меньше 1% от вентилируемой площади крыла. Установлено также, что наиболее выгодным с точки зрения эффективности, изменения подъемной силы является расположение ряда воздухоподводящих отверстий примерно на середине (по хорде) крыла. Однако при этом существенно возрастает сопротивление, и поэтому постоянная или режимная подача воздуха для поддержания расчетного значения подъемной силы обычно осуществляется через задний ряд отверстий, а когда после насыщения требуется дальнейшее уменьшение подъемной силы, включается и передний ряд отверстий.
Принципиальная схема автоматически управляемого вентилируемого крыла показана на рис. 3.6. В пустотелых стойках 10 и крыле 7 проложены воздушные трубопроводы 9 и 11, по которым через командно-исполнительные органы САУПК атмосферный воздух подводится к вентилируемым участкам площади крыла. Из труб 9 через часто расположенные небольшие отверстия воздух выходит в канавки 8, расположенные на засасывающей поверхности крыла. Скапливаясь в канавках, воздух относительно спокойным ровным слоем обтекает аэрируемую часть поверхности крыла. В стойках проложены также воздушные трубопроводы 5, нижние концы которых соединяются с отверстиями 6 в стенках стойки. Отверстие 6 — это так называемый приемник рабочего давления сервоусилителей. Обтекающий стойку поток вследствие эжекционного (отсасывающего) эффекта через отверстие 6 создает в трубопроводе 5. пониженное давление. Верхний конец этого трубопровода соединен с золотниковой коробкой пневмосервоусилителя 1.
Под воздействием механических сигналов датчиков автоматической системы управления золотники 3 перемещаются и соединяют трубопровод 5 с левой или правой полостью рабочего цилиндра пневмосервоусилителя. В результате возникающей разности давлений в полостях цилиндра (в одной полости атмосферное давление, а в другой, соединенной с трубопроводом 5, — пониженное)поршень 2 будет перемещаться влево или вправо, развивая достаточное усилие, чтобы открыть или закрыть клапаны А и Б, регулирующие подачу атмосферного воздуха к засасывающей поверхности крыла.
Пневмосистема вентилирующего устройства отрегулирована так, что при расчетном положении крыла золотники сервоусилителя разобщают полости его цилиндра с трубопроводом 5. При этом клапан А приоткрыт, и воздух непрерывно поступает на поверхность крыла через задний ряд отверстий. Если из блока датчиков по
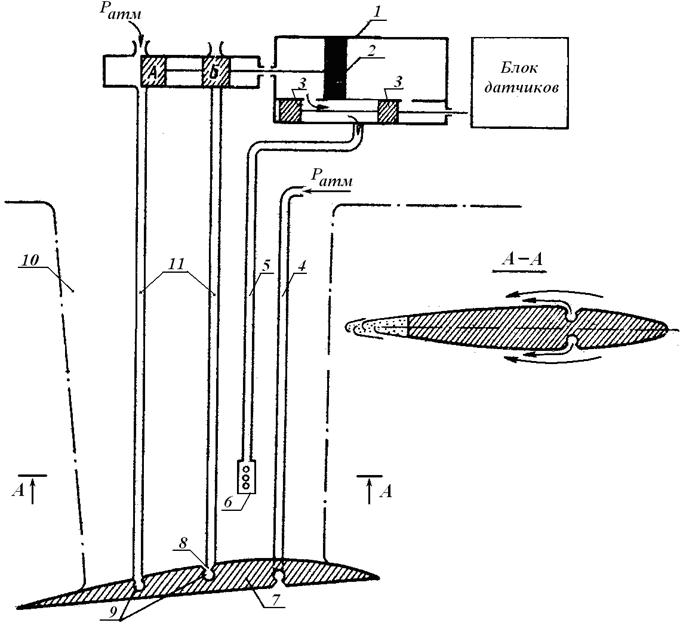
Рис. 3.6 Вентилируемое крыло
ступает сигнал на дальнейшее уменьшение подъемной силы, то клапан А открывается полностью, а затем открывается и клапан Б, пропуская атмосферный воздух и к переднему ряду отверстий. При сигналах датчиков на увеличение подъемной силы закрываются сначала клапан Б, а затем и клапан А. При полностью закрытых клапанах А и Б достигается максимальная подъемная сила (больше расчетной) теперь уже невентилируемого крыла. В состав пневмосистемы всего вентилирующего устройства входят воздушные трубы 4, через которые воздух подводится «самотеком» к нагнетательной стороне крыла в случае, если давление на ней становится ниже атмосферного.
Для регулирования подачи воздуха в пневмомеханической САУПК используются достаточно надежные и простые датчики: маятник, гироскопы (чувствительные к угловой скорости), манометры статического давления, приборы для определения глубины погружения крыла и др.
Система воздушной стабилизации движения является весьма чувствительной и быстродействующей, так что она реагирует даже на короткие небольшие волны. По сравнению с механизированными крыльями с электронной САУПК вентилируемые крылья имеют следующие преимущества:
крылья не имеют подвижных частей (закрылков) и, следовательно, являются более простыми по конструкции и надежными в эксплуатации;
блок датчиков управления состоит из более простых и надежных приборов;
малые усилия на передвижку золотников и клапанов воздушной системы позволяют обходиться без мощных гидроприводов;
на вентилируемых крыльях можно получить заметно большие скорости движения СПК в докавитационном режиме;
система в целом более простая, надежная, намного дешевле электронной и не требует особой квалификации экипажа судна,
К недостаткам вентилируемых крыльев относятся следующие:
повышенное сопротивление крыла (примерно на 5—6%), в результате чего скорость СПК с вентилируемыми крыльями на тихой воде меньше по сравнению со скоростью однотипных судов, оборудованных обычными крыльями. Однако в условиях волнения благодаря уменьшению размахов качки и замывания корпуса СПК с вентилируемыми крыльями развивают большую скорость;
увеличенная площадь вентилируемого крыла на 1 т создаваемой подъемной силы по сравнению с обычными погруженными крыльями. В настоящее время благодаря своим преимуществам вентилируемые, крылья получают распространение.
В дополнение к вышерассмотренному основному признаку классификации подводных крыльев, по которому они разделены на различные конструктивные типы в зависимости от способа регулирования (стабилизации) подъемной силы, можно назвать еще несколько признаков их классификации.
По способу крепления к корпусу судна подводные крылья разделяют на две группы:
неподвижные или жестко скрепленные с корпусом крылья. Это обычный, наиболее распространенный тип крыльев;
подвижные или убирающиеся крылья, которые крепятся с корпусом шарнирно (поворачивающиеся, откидные) или по какой-то другой подвижной схеме крепления так, что могут убираться из воды (или прижиматься к корпусу). Это бывает необходимо в целях уменьшения габаритной осадки судна при подходе к пирсу или же для обеспечения движения судна в водоизмещающем режиме, когда движение на крыльях невозможно (мелководье, сильное волнение, аварийное состояние крыльев). По количеству крыльевых стоек различают крылья на двух и большем количестве стоек и, консольные крылья, крепящиеся на одной стойке.
По протяженности крыльев в поперечной плоскости судна различают монокрылья, у которых основная рабочая часть расположена под корпусом, а размах больше ширины корпуса, и раздельные крылья, у которых основные рабочие площади расположены не под днищем, а за его пределами во внешнюю сторону от бортов. Раздельными бывают чаще носовые крылья, которые являются, по существу, отдельными самостоятельными крыльями, расположенными в одной поперечной плоскости судна.
По расположению крыльев по длине судна различают носовые, кормовые и средние крылья.
По назначению можно выделить следующие типы крыльев;
основные несущие крылья, которые поддерживают судно в надводном положении в крыльевом режиме движения;
дополнительные или вспомогательные крылья. Это крылья (обычно расположенные в нос или корму от главного крыла), которые несут незначительную нагрузку и, по существу, исполняют роль стабилизаторов, обеспечивающих устойчивость движения СПК;
стартовые крылья, обеспечивающие выход судна на основной режим движения. В крыльевом режиме движения судна стартовые крылья находятся в надводном положении.
Date: 2015-05-19; view: 1006; Нарушение авторских прав