Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Конструкция асинхронных двигателей
|
|
Электродвигателя
Редуктора
Силового преобразователя
Схемы управления
Предназначенная для приведение в действие исполнительных органов рабочей машины и управления этим движением.
Одной из разновидностей ЭП является сервопривод. Он необходим там, где предъявляются высокие требования к погрешности позиционирования, стабилизации скорости, стабилизации момента вращения, высокой динамике.
Сервопривод - это система привода, которая в широком диапазоне регулирования скорости обеспечивает динамичные, высокоточные процессы и обеспечивает хорошую их повторяемость
И если для игрушек задача управления электроприводом состоит в осуществлении пуска/останова, а иногда в изменении направления вращения, то для большинства других применений требуется еще и регулирование скорости вращения или связанной с ней производительности электропривода. Решение этой весьма непростой технической проблемы может осуществляться различными способами.
Для плавного регулирования скорости вращения двигателей широко используются три основных типа устройств:
1. механические вариаторы,
2. гидравлические и электромагнитные муфты скольжения
3. электронные регуляторы.
Основным недостатком первых двух типов устройств является наличие механически изнашиваемых элементов, которые затрудняют эксплуатацию и обслуживание приводов, особенно в загрязненных и взрывоопасных средах, а также необходимость компоновки регулирующего устройства в один агрегат вместе с двигателем и нагрузкой.
Электронные регуляторы свободны от этих недостатков и поэтому находят все более широкое применение.
Для начала рассмотрим принцип работы асинхронного электродвигателя – как самого распространенного в промышленности.
Основные понятия, определения, принципы работы
Основой любого электропривода является электрический двигатель,
В промышленности и быту применяются в основной массе двигатели переменного и постоянного тока. Исторически сложилось, что для регулирования скорости вращения чаще использовали двигатели постоянного тока. Преобразователь в данном случае регулировал только напряжение, был относительно прост и дешев. Однако двигатели постоянного тока имеют сложную конструкцию, критичный в эксплуатации щеточный аппарат и сравнительно дорогие.
Асинхронные двигатели широко распространены, надежны, имеют относительно невысокую стоимость, хорошие эксплуатационные качества, но регуляторы скорости их вращения из-за сложности систем электронного регулирования частоты питающего напряжения стоили до начала 80х годов дорого и не обладали качествами, необходимыми для широкого внедрения в индустрию.
Благодаря бурному развитию электроники и появлению недорогих преобразователей частоты стало возможным регулирование скорости вращения асинхронных двигателей в широких масштабах.
Для лучшего понимания принципов, лежащих в основе электронных систем регулирования скорости вращения, напомним устройство асинхронного электродвигателя с короткозамкнутым ротором — наиболее массового, повсеместно применяемого типа электродвигателя. Достаточно сказать, что суммарный объем электроэнергии, используемой для приведения в движение всех приводов с асинхронными двигателями, составляет более 70% всей потребляемой электроэнергии. В дальнейшем диапазон применения асинхронных двигателей будет неуклонно расширяться.
В настоящее время на заводе в эксплуатации находятся огромное количество как отечественных электродвигателей различных серий: А, АО, АК, АО2, А2 4А, 5А, АИ, А, АДА, так и электродвигателей импортного производства.
Серия - ряд электродвигателей, которые объединены общностью конструкции, имеют общее наименование и закономерно возрастающий определяющий параметр.
У асинхронных электродвигателей общего назначения в качестве определяющего параметра выступала высота оси вращения. На базе этих двигателей создавались модификации и двигатели специального исполнения - электродвигатели с повышенным пусковым моментом, электродвигатели с повышенным скольжением, многоскоростные электродвигатели, электродвигатели с электромагнитным тормозом, малошумные электродвигатели, и др.
Электродвигатели с повышенным пусковым моментом предназначены для привода механизмов с высокими статическими или динамическими моментами на валу. Эти электродвигатели отличаются от базовых обычно только формой паза ротора и обмоточными данными.
Электродвигатели с повышенным скольжением применяются для привода механизмов с пульсирующей нагрузкой, частыми или тяжелыми пусками или реверсом. Скольжение при номинальной нагрузке у таких электродвигателей в 2 — 3 раза выше, чем у базовых. Электродвигатели с повышенным скольжением отличаются от электродвигателей основного исполнения увеличенным активным сопротивлением обмотки ротора, что достигается применением алюминиевого сплава с уменьшенной удельной электрической проводимостью при сохранении геометрии магнитопровода ротора или уменьшением сечения паза ротора при использовании для заливки клетки чистого алюминия.
Многоскоростные электродвигатели отличаются от электродвигателей базового ряда обмотками статора и пазами ротора. Число частот вращения может быть две, три или четыре.
Электродвигатели с фазным ротором предназначены для привода механизмов, у которых необходимо регулировать частоту вращения вниз от номинальной в небольших пределах (1: 5), а также для механизмов с тяжелым и длительным пуском. Обмотки фазных роторов выполняются всыпными или стержневыми.
Электродвигатели со встроенным электромагнитным тормозом предназначены для привода механизмов, где требуется быстрая остановка после отключения электродвигателя. При использовании механического торможения вместо электрического тепло, выделяемое в процессе торможения, рассеивается не электродвигателем, а тормозным устройством, т.е. электродвигатель нагревается значительно меньше, а частота циклов может быть увеличена.
В асинхронном электродвигателе имеются две основные части:
вращающийся ротор и неподвижный статор.
В наиболее широко распространенных - трехфазных асинхронных электродвигателях статор подключается к трехфазной сети переменного тока.
Трехфазный ток обмоток статора создает вращающееся магнитное поле с магнитным потоком Ф. Поле, вращаясь вокруг ротора и пересекая его обмотки, наводит в них электродвижущие силы (э.д.с.), под действием которых в обмотках ротора проходит ток Ir.
При взаимодействии тока ротора с вращающимся магнитным полем статора возникает сила, которая заставляет ротор двигаться в сторону вращения магнитного поля. Этой силе соответствует вращающийся электромагнитный момент М (Н-м), величина которого пропорциональна магнитному потоку Ф (Вб) поля статора и току ротора Ir (А), т. е.
М = Ф х Ir (1)
Необходимо отметить, что вращающееся поле может быть двухполюсным, четырехполюсным, шестиполюсным и т.д. Число пар полюсов вращающегося поля определяется устройством создающей его обмотки статора.
Частота вращения магнитного поля ns асинхронной машины составляет,
 об/мин:
об/мин:
(2)
Где f — частота напряжения питающей сети (стандартная частота 50 Гц);
р — число пар полюсов обмотки машины.
Частоту вращения магнитного поля (ns) асинхронной машины называется также синхронной частотой.
При одной и той же частоте питающего тока (промышленная частота 50 периодов в секунду) многополюсное магнитное поле будет вращаться медленнее двухполюсного в число раз, равное числу пар полюсов
| Число пар полюсов | Число полюсов | при 50 Гц, ns,об/мин. | при 60 Гц, ns, об/мин. |
В асинхронном двигателе частота вращения ротора, увлекаемого магнитным полем статора, меньше частоты вращения самого поля.
В самом деле, в случае равенства этих частот прекратилось бы движение поля по отношению к ротору, так как в роторе перестала бы наводиться электродвижущая сила, создающая токи в его обмотках. При этом прекратилось бы взаимодействие ротора с вращающимся полем и устранилась бы причина вращения ротора.
Ввиду различия частот вращения поля и ротора рассматриваемые машины получили название асинхронных.
Частота же вращения ротора n зависит от режима работы машины и при работе в двигательном режиме находится в пределах: 0< n< ns
Определим, с какой частотой магнитное поле машины пересекает проводники ротора.
Эта частота скольжения поля относительно ротора n2
n2 = ns - n = ns  = ns s
= ns s
Величина s, имеющая большое значение для работы асинхронных машин, называется скольжением и определяется так:
S = или в процентах S = 100%
Таким образом скольжение S характеризует на сколько частота вращения ротора n меньше синхронной частоты ns (частоты вращающего магнитного поля).
0 ≤ S ≤1;
S=0 - синхронная частота;
S=1 – ротор не вращается;
Скольжение S является важной величиной для расчетов двигателя.
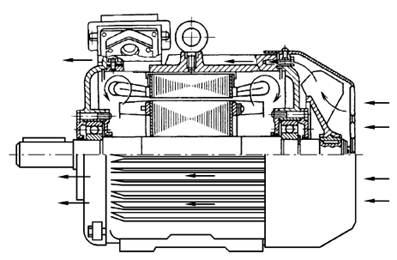
КОНСТРУКЦИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Асинхронные двигатели по конструкции можно подразделить на два основных класса:
1. Бесколлекторные (самые массовые в применении)
Асинхронные бесколлекторные двигатели нашли наиболее широкое распространение в различных отраслях народного хозяйства благодаря сравнительной простоте и надежности в эксплуатации и имеют два основных исполнения:
А) с короткозамкнутой обмоткой ротора (самые многчисленные)
Б) с фазной обмоткой ротора (с контактными кольцами)
Date: 2015-05-09; view: 1140; Нарушение авторских прав