Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Микропроцессоры в системах управления
|
|
 Микропроцессор (МП) — программно-управляемое устройство, осуществляющее процесс обработки цифровой информации и управления им. Основными обязательными функциональными узлами МП являются арифметически-логическое устройство (АЛУ) и устройство управления (УУ). Однако для взаимодействия МП с внешним миром необходимы запоминающие устройства для хранения программ и результатов промежуточных вычислений, устройства ввода—вывода (УВВ) информации и др. Совокупность перечисленных устройств называется микропроцессорным устройством (МПУ), упрощенная структурная схема которого приведена на рис. 1.45.
Микропроцессор (МП) — программно-управляемое устройство, осуществляющее процесс обработки цифровой информации и управления им. Основными обязательными функциональными узлами МП являются арифметически-логическое устройство (АЛУ) и устройство управления (УУ). Однако для взаимодействия МП с внешним миром необходимы запоминающие устройства для хранения программ и результатов промежуточных вычислений, устройства ввода—вывода (УВВ) информации и др. Совокупность перечисленных устройств называется микропроцессорным устройством (МПУ), упрощенная структурная схема которого приведена на рис. 1.45.
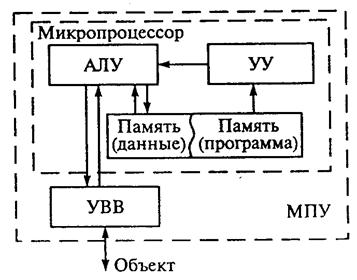 Рис. 1.45
Рис. 1.45
|
Устройство ввода—вывода обычно разделяют на две части: интерфейс (англ. interface — устройство отображения) и внешнее или периферийное устройство. Интерфейс преобразует сигналы от МП в сигналы, воспринимаемые внешним устройством, и наоборот. Периферийные устройства, связанные с объектом управления, называются также устройствами сопряжения (УСО). Обычно они согласовывают сигналы, поступающие с датчиков, контролирующих параметры объекта с интерфейсом МПУ. Устройства сопряжения обычно включают в себя преобразователи аналоговых сигналов в цифровые (АЦП) и наоборот — цифровые в аналоговые (ЦАП), а также усилители сигналов.
На основе МПУ создаются различные вычислительные устройства, в частности, рассчитанные на взаимодействие с человеком и содержащие в качестве средств связи клавиатуру и дисплей. Если же МПУ используется для управления различными техническими устройствами, объектами или техническими системами, то такие МПУ называются микропроцессорными контроллерами или просто микроконтроллерами. В качестве примера использования микроконтроллера на рис. 1.46 приведена упрощенная схема плавного пуска двигателя. Пуск двигателя в этой схеме осуществляется от трехфазной сети через встречновключенные тиристоры VS в каждой фазе. Принцип плавного пуска реализуется за счет регулирования напряжения, подаваемого на обмотки двигателя, которое осуществляется изменением угла управления тиристорами VS по заданному закону.
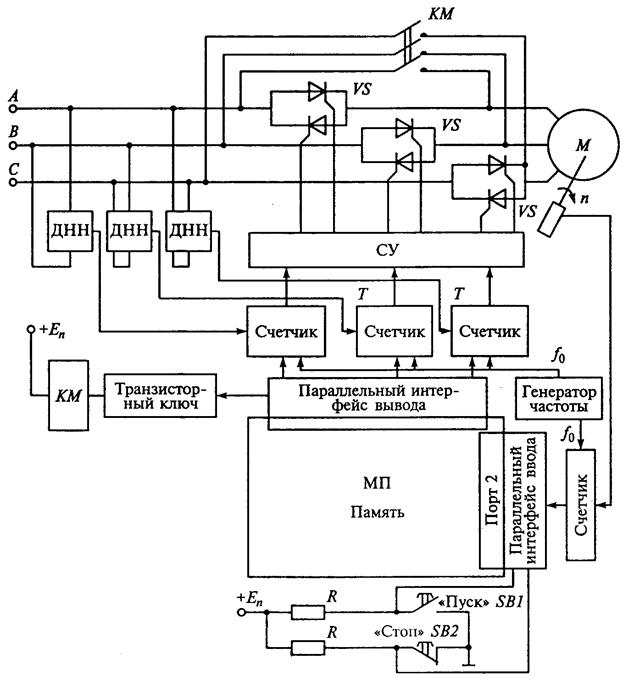
Рис. 1.46
Система обеспечивает управление тиристорами, формируя импульсы управления в заданные моменты времени, соответствующие углам управления α (рис. 1.47). Для этого в нее должны входить датчики нуля напряжения ДНН, фиксирующие моменты начала отсчета угла включения α и блока тиристоров (БТ). Сигналы с ДНН поступают на микропроцессорную систему и служат для запуска таймеров соответствующей фазы. Таймер представляет собой счетчик импульсов внутреннего генератора стабильной частоты. С приходом сигнала от ДНН этот счетчик начинает считать. От обычного счетчика таймер отличается наличием предуставки, т. е. определенно числа, при достижении которого счетчик таймера останавливается и выдает выходной сигнал. Этот сигнал подается на устройство управления тиристорами и служит для отпирания соответствующего тиристора. Счетчик таймера сбрасывается на ноль и ждет появления следующего импульса от соответствующей от соответствующей фазы ДНН.
Предуставка таймера может изменяться, вместе с этим будет меняться и угол включения α тиристора. Для этого каждый канал таймера подключается к микропроцессору через параллельный интерфейс вывода. На микропроцессор возлагается задача менять предуставки таймера в соответствии с выбранным законом изменения напряжения на двигателе АД. Этот закон может быть задан как некоторая функция u(t), где t - текущий момент времени пуска двигателя. В этом случае напряжение будет меняться по жесткому закону u(t) вне зависимости от того, как будет происходить реальное увеличение числа оборотов двигателя u(t). При возможных отклонениях в условиях пуска (пуск в холодную погоду, загустевание смазки в подшипниках и т.п.) такой жесткий закон может привести к появлению токовых перегрузок двигателя.
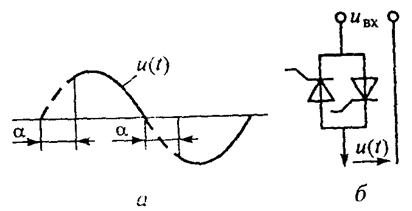 Рис. 1.47
Рис. 1.47
|
Более надежным способом пуска является использование функциональной связи между напряжением на двигателе U, током I через его обмотки и числом оборотов  . Подставив в эту формулу ограничение по току
. Подставив в эту формулу ограничение по току  , получим закон изменения напряжения
, получим закон изменения напряжения  . Однако для реализации этого закона нужен датчик частоты вращения двигателя. Такой датчик требует дополнительного канала таймера — канала записи момента - счетчиком и генератором стабильной частоты.
. Однако для реализации этого закона нужен датчик частоты вращения двигателя. Такой датчик требует дополнительного канала таймера — канала записи момента - счетчиком и генератором стабильной частоты.
После разгона двигателя до номинальной скорости, угол α становится равным нулю. Тиристоры имеет смысл шунтировать силовыми контактами контактора КМ, управление которым осуществляет микропроцессор.
Контрольные вопросы.
1. Определите полные потери мощности в ключе, коммутирующем активную нагрузку  =1 Ом. Статическая ВАХ в линеаризованном виде имеет параметры:
=1 Ом. Статическая ВАХ в линеаризованном виде имеет параметры:  =2 В;
=2 В;  =0,2 Ом;
=0,2 Ом;  =1 кОм;
=1 кОм;  =20 мкс;
=20 мкс;  =40 мкс. Питание поступает от источника напряжения постоянного тока с Е=110 В. Импульсы управления на выключение и включения ключа поступают периодически с равной длительностью
=40 мкс. Питание поступает от источника напряжения постоянного тока с Е=110 В. Импульсы управления на выключение и включения ключа поступают периодически с равной длительностью  , где
, где  =1 мс. Расчеты проиллюстрировать диаграммами мгновенных значений тока
=1 мс. Расчеты проиллюстрировать диаграммами мгновенных значений тока  , напряжения
, напряжения  и мощности
и мощности  ключа.
ключа.
2. Определите максимальное напряжение, возникающее на ключе при отключении RL-нагрузки при следующих исходных данных: R=1 Ом; L=0,1 мГн. Питание нагрузки осуществляется от источника напряжения постоянного тока U=24 В, статическая ВАХ ключа идеальна и время выключения  =1 мкс.
=1 мкс.
3. В задаче №2 нагрузка зашунтирована обратным идеальным диодом. Определите время спадания тока в нагрузке до нуля при выключении ключа.
4. Перечислите основные различия между биполярными и полевыми транзисторами и поясните их влияние на применение этих транзисторов в качестве силовых ключей.
5. Поясните назначение и принцип действия элементов ЦФТП на Рис.1.13.
6. Определите мощность коммутируемого конденсатора С (см. рис.1.17,а), необходимую для выключения тиристора с временем выключения  =50 мкс, полагая ток, поступающий в цепь тиристора и конденсатора на интервале выключения, неизменным и равным 100 А.
=50 мкс, полагая ток, поступающий в цепь тиристора и конденсатора на интервале выключения, неизменным и равным 100 А.
7. Для чего в схемах драйверов полевых транзисторов используются биполярные транзисторы, если учесть, что полевые транзисторы по существу управляются напряжением и практически не потребляют ток управления в стационарном состоянии?
8. Перечислите основные преимущества использования МПУ в системах управления силовых электронных устройств.
Date: 2015-05-09; view: 1832; Нарушение авторских прав