Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Рычажные и кулачковые механизмы
|
|
Рычажные механизмы применяются в машинах, приборах и аппаратах для обеспечения требуемого движения исполнительного органа. Наиболее распространены 4-х звенные механизмы. Они могут иметь четыре шарнира (шарнирные четырехзвенники), три шарнира и одну поступательную пару или два шарнира и две поступательных пары.
На рис. 2.47,а,б показана схема аксиально- поршневого насоса и распределитель жидкости. Здесь в процессе вращения вала, прикрепленные к нему на шаровых шарнирах поршни (рис. 2.47,а) возвратно-поступательным движением в блоке цилиндров засасывают и выталкивают жидкость через окна распределителя (рис. 2.47,б). На рис.2.47,в показан кривошипно-коромысловый механизм, применяемый для преобразования качательного движения во вращательное движение.
Механизм на рис. 2.47, г подобен механизму на рис. 2.47,в, но из-за нетехнологичности его заменяют кривошипно-ползунным нецентральным механизмом (рис. 2.47,д). При десаксаже e= 0 он превращается кривошипно-ползунный центральный механизм (рис. 2.47,е). Такие механизмы широко применяются в поршневых двигателях, где 1- кривошип, 2- шатун, а ползуны 3 называются поршнями.
На рис. 2.47,ж показана схема кривошипного механизма с качающимся поршнем, применяемого в судовых двигателях.
На рис. 2.47,з показан кривошипный механизм с качающейся кулисой. Такие механизмы применяются в станках.
Применяются также синусные механизмы (рис. 2.47,и).
Существуют и другие кривошипные механизмы.

|
Р2
Р1 б)
а)


в)

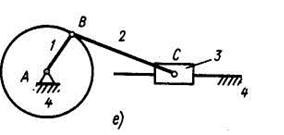

Рис. 2.47. Кинематические схемы рычажных механизмов
Рассмотрим более подробно кривошипно-ползунный механизм (рис.2.47,е). Для анализа законов движения обычно применяют графический метод, включающий построение планов скоростей и ускорений.
Положение звена, из которого начинается отсчет его движения
в одном направлении, называется начальным или крайним. Положение, в котором кривошип 1 и шатун 2 располагаются на одной прямой, называется мертвым.
Метод основан на графическом решении векторных уравнений движения.
Вначале должны быть заданы: кинематическая схема; закон движения ведущего звена.
Построим план скоростей (рис. 2.48).
Пусть известны: W1, e1 – угловые скорость вращения и ускорение кривошипа.
1. Определяем линейную скорость движения точки А кривошипа
uА= W1lOA.
Вектор скорости перпендикулярен ОА. Выбираем масштаб mu. Откладываем из полюса Рu отрезок Рu а*mu = uА.
2. Проводим из Рu направление скорости перемещения точки В.
3. Из точки а плана скоростей перпендикулярно ВА проводим линию в направлении скорости движения точки А шатуна.
4. Пересечение линий uА и uВ дают скорость перемещения точки В


 В= mu Рub;) ВА= mu ab (2-191)
В= mu Рub;) ВА= mu ab (2-191)
Построим далее план ускорений.
Результрующее укорение складывается из геометрических сумм нормальных и тангециальных составляющих.
1. Определяем для точки А кривошипа нормальное ускорение
anA= lOAW12. (2-192)
2. Тангенциальное ускорение точки А
atA= lOAe1. (2-193)
Вектор anA направлен вдоль ОА к точке О, а вектор atA перпендикулярен ОА.
Проведем anA из полюса Ра, а atA из точки а’, предварительно выбрав масштаб mа.
Тогда ускорение точки А будет
 aA= mа РAb. (2-194)
aA= mа РAb. (2-194)
Ускорение точки В найдем из уравнения

 аВ = аА + аВА= аА + anВА + atВА. (2-195)
аВ = аА + аВА= аА + anВА + atВА. (2-195)
Рис. 2.48
Построение планов скоростей и ускорений в кривошипно-
ползунном механизме:
а)- кривошипно-ползунный меанизм;
б) план скоростей;
в) план ускорений;
г) график изменения скорости;
д) график изменения ускорения.
Оно направлено, как следет из чертежа, вдоль ВО. Вектор anВА направлен по АВ к центру вращения А и откладывается из точки а плана
anВА= u2ВА/ lAB.
3.Тангенциальная составляющая atВА проходит перпенди-кулярно anВА.
Пересечение anВА с направлением ВО дает ускорение точки В
 aB = mа Рab.
aB = mа Рab.
Если построить планы скоростей и ускорений для разных значений j, то получим графики, показанные на рис.2.48,г,д.
Отметим, что график изменения ускорения можно получить из графика изменения скорости графичеким дифференцированием.
Зная ускорение и приведенные массы, можно рассчитать силы инерции

 Fu= - mna; Mu= - Jne,. (2-196)
Fu= - mna; Mu= - Jne,. (2-196)
а затем и реакции.
Другой разновидностью рычажных механизмов являются кулачковые механизмы (рис.2.49).
Они классифицируются
- по характеру движения (пространственные, плоские, поступательные, вращательные, качающиеся);
- по взаимному расположению кулачка и толкателя;
- по типу замыкания.

Рис. 2.49. Схема и законы движения в кулачковом механизме.
Для анализа должны быть заданы:
кинематическая схема; профиль кулачка; закон движения ведущего звена.
Анализ выполняют графическим или аналитическим методом. Строят планы скоростей, ускорений. В зависимости от профиля кулачка могут быть следующие законы движения: равноускоренный, синусоидальный.
Date: 2015-11-13; view: 920; Нарушение авторских прав