Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Поворотной платформы карьерного экскаватора
|
|
Процесс копания породы экскаватором сопровождается существенными изменениями технологических параметров рабочего оборудования: положения рукояти относительно стрелы, а также массы ковша по мере его заполнения. Длинна «вылета» рукояти (расстояние ОС, рис.5.2) увеличивается от 7м до 10 м, угол её поворота α – от 27° до 93°, масса горной породы в ковше mк увеличивается от 0 т до 18 т (скальная порода). Кроме того, изменяется длина полиспастной системы канатов подъема ковша (отрезок ВС, рис.5.2). Вследствие этого в процессе черпания происходит изменение «плавание» частот собственных колебаний рабочего оборудования.
Рассмотрим раздельное влияние изменяемых технологических параметров на частоты собственных колебаний рукояти по координатам х1 и х2 (рис.5.1) и верхней секции стрелы по координате х3, а также при одновременном изменении данных параметров, как это происходит в реальном процессе черпания породы: выдвижение рукояти с одновременным подъемом и постепенным заполнением ковша по мере поворота рукояти. Во втором случае траекторию движения зубьев ковша по откосу забоя принимаем в виде логарифмической спирали [1], описываемой уравнением:
 , (5.64)
, (5.64)
где  – длина «вылета» рукояти (расстояние ОС, рис.5.2);
– длина «вылета» рукояти (расстояние ОС, рис.5.2);
ρ0 – начальный радиус – «вылет» рукояти;
α – угол между вертикалью и осью рукояти (начальное значение α =27°);
К - коэффициент (К = сtg ψк); ψк – угол между вектором суммарного усилия копания Fz (t), рис.5.1, и касательной к траектории логарифмической спирали (показанной на рис. 5.8) в точках соприкосновения зубьев ковша и забоя. Среднее значение К = 0,1754.
Частоты собственных колебаний элементов модели рассчитываем на ЭВМ с помощью «векового» уравнения (5.16) по разработанной программе QUART. В качестве возбуждающей нагрузки принимаем функцию усилия в канатах подъема ковша, т.к. это усилие составляет более 90% от общего усилия реакции внешней среды экскаваторного забоя. Действующее усилие подъема Sn(t) принимаем из осциллограммы экспериментальных данных приведенной на рис.5.4.
При одновременном подъеме ковша, его заполнении и выдвижении рукояти собственные частоты колебаний рукояти по координате х1 перекрывают полосу ∆ f от 5,7 Гц до 6,3 Гц, рис. 5.5 (кривая 1), в среднем - 6 Гц ±4% при 100% жесткости полиспастной канатной системы механизма напора.

Рис. 5.5. Зависимость продольных колебаний рукояти экскаватора ЭКГ-8И по координате х1 в рабочем режиме черпания с постепенным наполнением ковша mк, и изменением параметров α, ВС, ОС для вариантов
различной жесткости канатов механизма напора:
1 – 2,7·107Н/м (ЭКГ-8И - 100%); 2 – 110%; 3 – 120%.
По координате х2 характер изменения собственных угловых колебаний рукояти, рис.5.6, имеет выпуклую форму с плавным убыванием на 25-30% от максимальных частот начального положения рукояти. Средняя частота собственных угловых колебаний рукояти в этом случае составляет примерно 3,4 Гц.

Рис. 5.6. Зависимость угловых колебаний рукояти экскаватора ЭКГ-8И по координате х2 в рабочем режиме черпания с наполнением ковша mк и изменением параметров α, ВС, ОС для вариантов различных моментов инерции рукояти: 1 – 297021 кг/м2(ЭКГ-8И - 100%); 2 – 110%; 3 – 120%.
По координате х3, рис. 5.7, собственные частоты угловых колебаний верхней секции стрелы перекрывают частотный диапазон от 11,7 Гц до 12,5 Гц. Средняя частота fx3cp»12 Гц ±4% в зависимости от загрузки ковша положения рукояти при 100% величине момента инерции, соответствующей типоразмеру экскаватора ЭКГ-8И. На этой частоте динамические нагрузки поворотной платформы экскаватора по спектральной плотности виброускорения (рис.3,4 и 3,5) имеют тональные подъемы на средней частоте 12 Гц почти для всех значений фракций кусковатости, а также коэффициентов разрыхления. И только при очень высокой кусковатости dср =1200 мм по оси z (рис.3.5, спектр 5) тональный подъем в спектре отсутствует. Его «маскируют» интенсивные ударные динамические нагрузки копания в данных условиях работы машины. При копании глины (рис.3.4, спектр 2) этот тональный подъем смещен в область более низких частот 10-11 Гц.
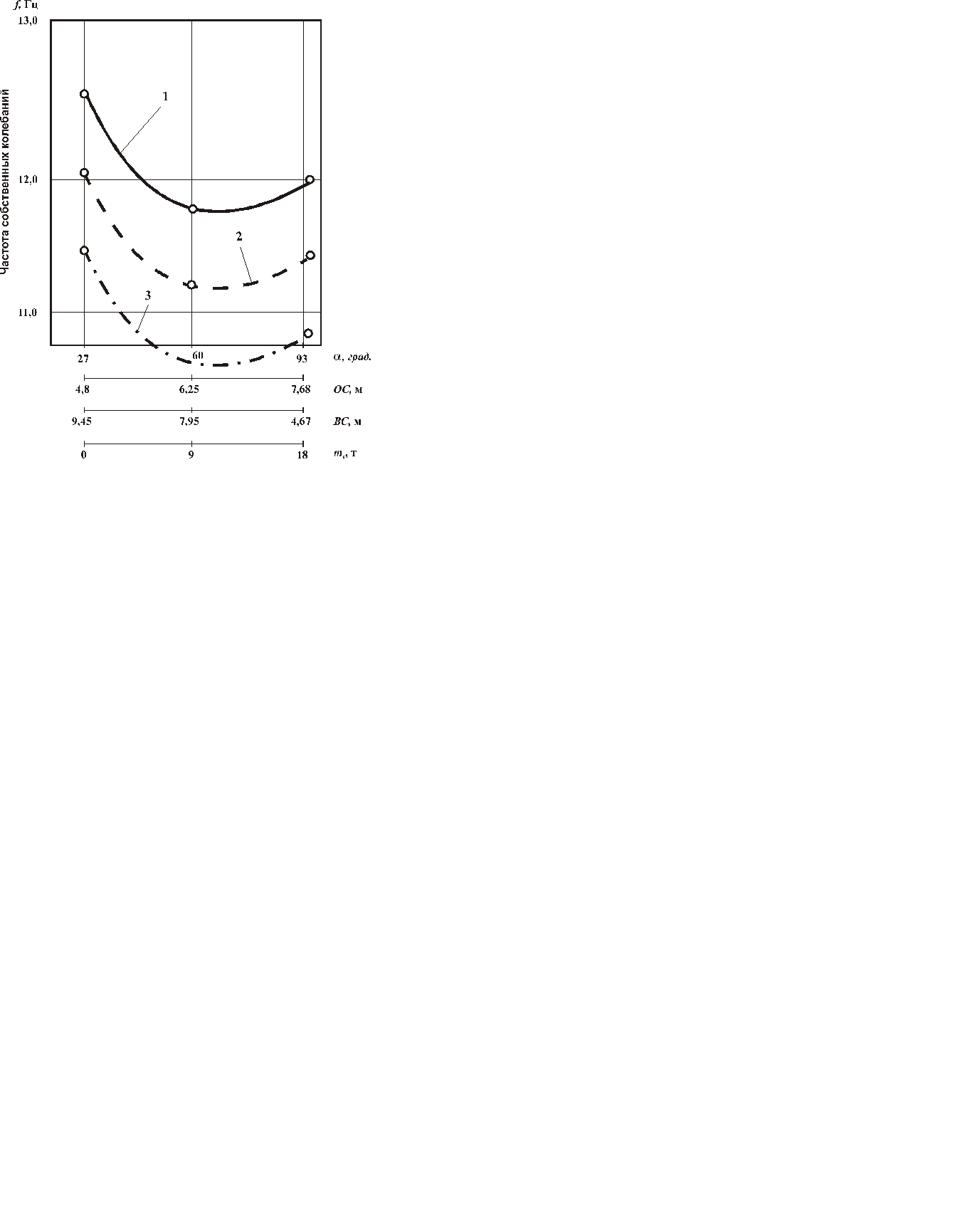
Рис.5.7. Зависимость частоты собственных колебаний верхней секции стрелы экскаватора ЭКГ-8И по координате х3 в рабочем режиме черпания с наполнением ковша mк и изменением параметров α, ВС, ОС для вариантов
различных моментов инерции верхней секции стрелы:
1 – 45779 кг/м2 (ЭКГ-8И - 100%); 2 – 110%; 3 – 120%.
Из приведенных данных теоретических и экспериментальных исследований видно, что собственные колебания элементов рабочего оборудования проявляются в реальном процессе вибрации поворотной платформы экскаватора в виде резонансных пиков колебаний поворотной платформы машины и оборудования, размещенного на ней. Частоты этих резонансных пиков определяются сочетанием жесткости подвески рукояти и стрелы, их инерционных параметров: масс и моментов инерции.
Таким образом, варьируя параметрами жесткости подвески рукояти и стрелы, их инерционными параметрами; массами и моментами инерции, можно изменять резонансную характеристику рабочего оборудования и спектральную характеристику вибрационных нагрузок экскаватора. Кроме того, в процессе создания экскаваторов с удлиненным рабочим оборудованием увеличение масс и моментов инерции рукояти и стрелы неизбежно, что необходимо учитывать в процессе идентификации колебаний основных узлов машины.
Интерес представляют зависимости влияния инерционных и жесткостных параметров на собственные частоты колебаний рабочего оборудования, приведенные на рис.5.5, рис.5.6 и рис.5.7. Из рисунков видно, что увеличение инерционных параметров на 20% приводит к снижению частот собственных колебаний элементов рабочего оборудования на 8-9% (рис. 5.5 и 5.7), а увеличение жесткости канатов механизма напора на 20% - к возрастанию собственных частот на 12% (рис.5.6).
В процессе проектирования новых экскаваторов, варьируя
конструктивными параметрами: массами, моментами инерции рукояти и верхней секции стрелы, а также жесткостью канатной подвески, можно добиться смещения собственных частот в высокочастотную или низкочастотную область спектра колебаний и уменьшить негативное влияние резонансных явлений.
Date: 2015-10-21; view: 592; Нарушение авторских прав