Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Механическая характеристика двигателя постоянного тока
|
|
Механическая характеристика двигателя с постоянными магнитами – зависимость n = f (M) между электромагнитным моментом M и скоростью вращения n при различных напряжениях U 1, U 2, U 3 на якоре (роторе коллекторного электродвигателя) – изображена на рис. 2.11.
| M ст |
| M п (I п) |
| M п2 (I п2) |
| M 2 (I 2) |
| M н (I н) |
| M (I) |
| U 1 |
| U 2 |
| U 3н |
| n 1 |
| n 2 |
| n дв |
| n н |
| n |
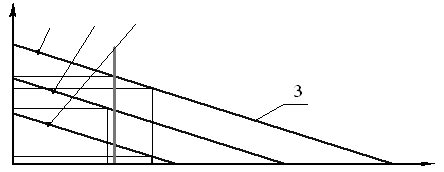
Рис. 2.11. Механическая характеристика двигателя
с постоянными магнитами
Согласно (2.2) и (2.3)
 (2.5)
(2.5)
где  – конструктивный коэффициент.
– конструктивный коэффициент.
Так как для конкретного двигателя K к = const, то электромеханическая характеристика n = f (I) имеет вид аналогичный механической характеристике.
Всегда статический (не зависящий от ускорения) электромеханический момент в точности равен моменту статической нагрузки на валу двигателя (действие равно противодействию) и не зависит от мощности двигателя. От мощности двигателя зависит так называемый номинальный момент M н при номинальной нагрузке, номинальной скорости n = n н, номинальном напряжении U н = U 3н и номинальном токе I = I н. Параметры P н – номинальная мощность на валу двигателя, n н, U н, I н указывают в паспорте двигателя. Значение М н легко вычислить, т. к. P н = M нp n н /30.
При пуске двигателя на номинальном напряжении скорость n дв = 0, а момент на валу равен пусковому моменту M п (см. рис. 2.11, характеристика 3). По мере разгона двигателя скорость растет, а момент уменьшается. Когда момент двигателя сравняется со статическим моментом нагрузки M ст, разгон прекращается, наступает установившееся движение со скоростью n дв ³ n н.
Максимальное ускорение наблюдается в момент пуска, оно может быть найдено исходя из основной формулы динамики
 (2.6)
(2.6)
 (2.7)
(2.7)
где M ст – статическая составляющая момента нагрузки (технологический момент, момент сил трения и т. п.);
M дин – динамическая составляющая момента нагрузки.
Для исключения перегрева двигателя и искрения на коллекторе нельзя превышать номинальный ток I н, кроме кратковременного (на несколько секунд) периода во время пуска. Для изменения скорости при номинальном или меньшем токе (моменте) следует изменить напряжение на якоре. При U 1 и I н получим n 1, при U 2 и I 2 – n 2 (рис. 2.11).
Напряжение можно менять плавно или ступенчато, соответственно получим плавное или ступенчатое изменение скорости. В двигателях с электромагнитным возбуждением (с электромагнитами) скорость можно также менять, регулируя магнитный поток. Обычно до номинального значения n н скорость изменяют с помощью напряжения U, выше n н скорость меняют, ослабляя магнитный поток. Предел скорости вращения определяется условиями коммутации токов на коммутаторе и механической прочностью якоря.
При пуске двигателя пусковой ток I п может существенно превышать допустимый. Поэтому пуск часто осуществляют при пониженном напряжении и токе, например при U2 и I п2.
| n |
| M |
| n |

Рис. 2.12. «Мягкая» характеристика двигателя
Однако лучшими регулировочными свойствами обладают двигатели независимого возбуждения и с постоянными магнитами, поэтому в настоящее время они имеют преимущественное применение. Практически все современные электродвигатели малой мощности, так называемые микродвигатели, имеют устройство возбуждения с постоянными магнитами.
Двигатели средней мощности выполняются с постоянными магнитами и электромагнитами (более дешевый вариант). В двигателях большой мощности используются электромагниты.
Date: 2015-09-24; view: 738; Нарушение авторских прав