Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Непрерывные динамические управляемые системы
|
|
Общепринятой формой описания непрерывных управляемых систем являются обыкновенные дифференциальные уравнения, в общем случае нелинейные. Одномерную систему в общем виде можно описать нелинейным дифференциальным уравнением вида
 ,
,
где y – выходная величина, u – управляющее воздействие (m ≤ n).
Это д.у. уравнение типа “вход-выход”.
Математические модели реальных управляемых систем, как правило, нелинейны. Однако во многих случаях их можно линеаризовать.
Для непрерывного времени линеаризованное уравнение «вход–выход» имеет вид

Введем следующие обозначения
 ,
,
 ,
,
где p = d / dt – символ дифференцирования по времени.
A (p), B (p) – операторные полиномы.
Тогда уравнение «вход–выход» можно записать в операторном виде:
A (p) y (t) =B (p) u (t),
Дробно-рациональная функция W (s)= B (s)/ A (s) – это передаточная функция системы, а полином A (s) – ее характеристический полином.
Здесь мы производим замену p = s, где s – комплексное число.
Развитие вычислительной техники привело к развитию метода пространства состояния.
Понятие состояния играет важнейшую роль при описании динамических систем. Состояние – это совокупность величин (вектор)  которые определяют (вместе с входным воздействием) будущее поведение системы.
которые определяют (вместе с входным воздействием) будущее поведение системы.
Пример. RC -цепочка
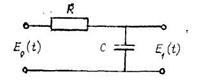
Она моделируется уравнением  . Здесь переменная состояния есть E 1поскольку значение E 1(t) и входного воздействия E 0(s)при s ≥ t однозначно определяет значение E 1(s) при s = t.
. Здесь переменная состояния есть E 1поскольку значение E 1(t) и входного воздействия E 0(s)при s ≥ t однозначно определяет значение E 1(s) при s = t.
В общем случае уравнения состояния – это системы дифференциальных или разностных уравнений первого порядка вместе с уравнениями для выходных величин. Начальное состояние представляет «память» системы о прошлом. Модель состояния непрерывной динамической системы описывается системой дифференциальных уравнений первого порядка, называемых уравнениями состояния:
 )
)
где X – вектор состояния системы; U – вектор входа; Y – вектор выхода.
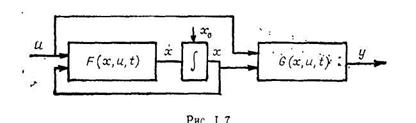
Для моделей состояния справедлив следующий факт: любая нелинейная динамическая система может быть представлена как соединение линейных динамических и нелинейных статических звеньев. Доказательство очевидно из рис., где в качестве линейного динамического звена взят интегратор.
Для линейных стационарных систем уравнения состояния имеют вид
 , где A, B, C, D – матрицы. (4.1)
, где A, B, C, D – матрицы. (4.1)
Преимущества моделей в форме пространства состояния:
· хорошие вычислительные свойства;
· они хорошо подходят для описания многомерных систем.
Уравнение «вход–выход» получается из уравнения состояния с помощью соотношений
W (s) = C (sI – A)-1 B, (4.2)
A (s) = det(s I – A).
Для многомерных систем W (s) – передаточная матрица системы.
Можно показать, что замена переменных состояния в (4.1) по формуле х'=Тх, где Т – неособая n х n -матрица (det T ≠ 0), не приводит к изменению передаточной функции (4.2). Это значит, что обратный переход от описания «вход–выход» к уравнениям состояния (4.1) неоднозначен: при сохранении передаточной функции базис в пространстве состояний можно выбирать по-разному. На практике применяются несколько типовых способов перехода от передаточной функции к уравнениям состояния. Эти способы соответствуют так называемым каноническим представлениям системы.
Компоненты для моделирования линейных непрерывных динамических систем собраны в Simulink в разделе Continuous.
Компонент Transfer Fcn служит для задания модели в форме передаточной функции, компонент State Space – в форме пространства состояния.
У блока Transfer Fcn – два параметра: вектор Numerator, задающий коэффициенты числителя ПФ, и вектор Denominator, задающий коэффициенты знаменателя ПФ.
Для создания этого объекта нужно сначала определить два полинома – числитель и знаменатель ПФ и записать их в параметры блока:
Numerator [1 2 3];
Denominator [1 4 5 6];
Блок State-Space используется для задания линейной стационарной модели в форме пространства состояний.
Параметрами блока State-Space являются четыре матрицы – A, B, C и D.
Модель в форме пространства состояния можно представить следующим образом:
Матрица D называется матрицей обхода. Обычно она равна нулю, так как в канале между входом и выходом обычно имеются динамические звенья.
При моделировании нелинейных систем можно использовать типовые нелинейности, которые собраны в разделе Discontinuities.
Однако часто для нелинейных систем приходится непосредственно моделировать системы д.у.
Date: 2015-09-05; view: 1201; Нарушение авторских прав