Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Основные показатели качества регулирования
|
|
К автоматическим системам регулирования предъявляются требования не только устойчивости процессов регулирования во всем диапазоне нагрузок на объект. Для работоспособности системы не менее необходимо, чтобы процесс автоматического регулирования осуществлялся при обеспечении определенных качественных показателей. Такими показателями являются:
1) ошибка регулирования (статистическая или среднеквадратическая составляющие);
2) время регулирования;
3) перерегулирование;
4) показатель колебательности;
5) динамический коэффициент регулирования Rd, который определяется из формулы
| (1) |
где смысл величин Y0 и Y1 ясен из рисунка 2.

Рисунок 2 – К понятию динамического коэффициента регулирования
Величина Rd характеризует степень воздействия регулятора на процесс, т.е. степень понижения динамического отклонения в системе с регулятором и без него.
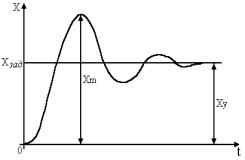
Рисунок 3 – График отработки ступенчатого сигнала задания
Величина перерегулирования зависит от вида отрабатываемого сигнала. При отработке ступенчатого воздействия по сигналу задания величина перерегулирования определяется по формуле
| (2) |
где значения величин Xm и Xy показаны на рисунке 3.
Время регулирования – это время, за которое регулируемая величина в переходном процессе начинает отличаться от установившегося значения менее, чем на заранее заданное значение δ – точность регулирования. Обычно принимается, что δ=3% – 5% от величины скачка по сигналу задания. Настройки регулятора необходимо выбирать так, чтобы обеспечить минимально возможное значение общего времени регулирования, либо минимальное значение первой полуволны переходного процесса. В непрерывных системах с типовыми регуляторами это время бывает минимальным при так называемых оптимальных апериодических переходных процессах. Дальнейшего уменьшения времени регулирования до абсолютного минимума можно достичь при использовании специальных оптимальных по быстродействию систем регулирования.
В некоторых САР наблюдается ошибка, которая не исчезает даже по истечении длительного интервала времени - это статическая ошибка регулирования εc. Данная ошибка не должна превышать некоторой наперед заданной величины.
У регуляторов с интегральной составляющей ошибки в установившемся состоянии теоретически равны нулю, но практически незначительные ошибки могут существовать из-за наличия зон нечувствительности в элементах системы.
Показатель колебательности M характеризует величину максимума модуля частотной передаточной функции замкнутой системы (на частоте резонанса) и, тем самым, характеризует колебательные свойства системы. Показатель колебательности наглядно иллюстрируется на графике (рисунок 4).
Условно считается, что значение M=1,5 – 1,6 является оптимальным для промышленных САР, т. к. в этом случае δ обеспечивается в районе от 20% до 40%. При увеличении M колебательность в системе возрастает.

Рисунок 4 – График модуля частотной передаточной функции замкнутой системы
В некоторых случаях нормируется полоса пропускания системы ωn, которая соответствует уровню усиления в замкнутой системе 0,05. Чем больше полоса пропускания, тем больше быстродействие замкнутой системе. Однако при этом повышается чувствительность системы к шумам в канале измерения и возрастает дисперсия ошибки регулирования.
Date: 2015-09-02; view: 1053; Нарушение авторских прав