Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Обоснование энергосберегающих режимов работы тракторов
|
|
1. Выписать из табл. 2.1 исходные данные по соответствующему варианту задания
2. Определить номинальное тяговое усилие заданного трактора РКРН и сравнить о значением, соответствующим его тяговому классу.
3. Определить энергосберегающий диапазон изменения тяговых усилий заданного трактора РКР = РКРО – РКРД и рассчитать соответствующие значения тягового КПД h ТО h ТД, а также буксование d о d Д.
4. Определить энергосберегающий диапазон рабочих скорей заданного трактора Vо – VД
5. Показать полученные диапазоны РКРО – РКРД и Vо – VД на примерной тяговой характеристике трактора
6. Представить итогове результаты расчетов по каждому пункту в форме таблицы, приведенной в конце задания.
Основные положения
Основной целью задания является получение студентами навыков самостоятельного выбора режимов высокоэффективного использования тракторов в зависимости от условий работы.
Трактор является промежуточным звеном при передаче энергии от двигателя к рабочим органам с.-х. машин. Поэтому одной из целей решения соответствующих задач является обоснование такого оптимального скоростного режима, при котором потери энергии при ее передаче к с.-х. машине будут минимальными с учетом допустимого буксования.
Таким образом, с позиций системного подхода полученный в первом задании оптимальный режим загрузки двигателя дополняется оптимизацией режима работы самого трактора.
Методические указания по выполнению задания 2
Методические указания охватывают все основные типы используемых и перспективных тракторов.
1. Исходные данные из табл. 2.1 выписываются в соответствии с номером варианта задания.
Таблица 2.1
Варианты заданий
| № вар. | Трактор | Колёсная формула | Тяговый класс | Эксплуа- тационная масса, кг | Почвенный фон |
| 1 | 2 | 3 | 4 | 5 | 6 |
| 1 | МТЗ–102 | 4К4 с колёсами разного размера | 1,4 | 4345 | Стерня |
| 2 | Т–150К | 4К4 с колёсами одинакового размера | 3 | 8092 | Стерня |
| 3 | Т–4А | гусеничный | 4 | 9010 | Стерня |
| 4 | ДТ–175С | гусеничный | 3 | 7622 | Стерня |
| 5 | ЮМЗ–6АКЛ | 4К2 с колёсами разного размера | 1,4 | 3500 | Поле, подг. под посев |
| 6 | Т–142 | 4К4 с колёсами разного размера | 2 | 4840 | Стерня |
| 7 | ЛТЗ–55А | 4К4 с колёсами разного размера | 0,9 | 3157 | Поле, подг. под посев |
| 8 | К–701 | 4К4 с колёсами одинакового размера | 5 | 12900 | Стерня |
| 9 | ДТ–175С | гусеничный | 3 | 7622 | Поле, подг. под посев |
| 10 | ДТ–75Т | гусеничный | 3 | 6420 | Стерня |
| 11 | Т–70СМ | гусеничный пропашной для возделывания сахарной свеклы | 2 | 4444 | Поле, подг. под посев |
| 12 | Т–150 | гусеничный | 3 | 7460 | Поле, подг. под посев |
| 13 | Т–250 | гусеничный | 5 | 12200 | Стерня |
| 14 | Т–3К | 4К2 с колёсами разного размера | 2 | 4720 | Поле, подг. под посев |
| 15 | ЛТЗ–60АВ | 4К4 с колёсами разного размера | 1,4 | 3490 | Поле, подг. под посев |
| 16 | Т–25А | 4К2 с колёсами разного размера | 0,6 | 1885 | Поле, подг. под посев |
| 17 | Т–30 | 4К2 с колёсами разного размера | 0,6 | 2370 | Поле, подг. под посев |
| 18 | Т–30А–80 | 4К4 с колёсами разного размера | 0.6 | 2430 | Стерня |
| 19 | Т–40М | 4К2 с колёсами разного размера | 0,9 | 2620 | Стерня |
| 20 | К–701М | 4К4 с колёсами одинакового размера | 5 | 13800 | Поле, подг. под посев |
| 21 | Т–30А–80 | 4К2 с колёсами разного размера | 0,6 | 2530 | Поле, подг. под посев |
| 22 | ЛТЗ–155 | 4К2 с колёсами одинакового размера | 2 | 5610 | Поле, подг. под посев |
| 23 | Т–40АМ | 4К4 с колёсами разного размера | 0,9 | 2880 | Поле, подг. под посев |
| 24 | К–700А | 4К2 с колёсами одинакового размера | 5 | 12200 | Стерня |
| 25 | Т–25А | 4К2 с колёсам разного размера | 0,6 | 1885 | Стерня |
| 26 | ДТ–75М | гусеничный | 3 | 7205 | Поле, подг. под посев |
| 27 | МТЗ–80 | 4К2 с колёсами разного размера | 1,4 | 3486 | Стерня |
| 28 | МТЗ–82 | 4К2 с колёсами разного размера | 1,4 | 3780 | Поле, подг. под посев |
| 29 | МТЗ–100 | 4К2 с колёсами разного размера | 1,4 | 4125 | Поле, подг. под посев |
| 30 | ЛТЗ–60АВ | 4К2 с колёсами разного размера | 1,4 | 3490 | Стерня |
2. Номинальным тяговым усилием в соответствий с принятой в нашей стране классификацией тракторов называют тяговое усилие трактора базового типа, реализуемое на стерне колосовых нормальной твердости и влажности на суглинистом черноземе при регламентируемом (допустимом по агротехническим требованиям) уровне буксования: 0,15 – для колесных 4К4; 0,17–0,18 – для колесных 4К2 и 0.05 – для гусеничных тракторов при работе двигателя на регуляторной ветви характеристики.
По указанному показателю принято десять, классов с.-х. тракторов 0,2; 0,6; 0,9; 1,4; 2; 3; 4; 5; 6; 8. Указанные цифры соответствуют значениям номинальных тяговых усилий тракторов в тонно-силах, поскольку тяговые классы тракторов принимались тогда когда инженерные расчеты проводили в технической системе единиц (МкГС), в которой единицами измерения силы являлись килограмм-сила и тонна-сила. Для перехода к современной системе (СИ) значения тяговых классов тракторов переводят килоньютоны (кН) путем умножения на 10. При этом в пределах каждого тягового класса оказываются тракторы определенного диапазона номинальных тяговых усилий РКРН. Соответствующие литературные данные приведены в табл. 2.2.
Таблица 2.2.
Тяговые классы тракторов и соответствующие диапазоны номинальных тяговых усилий
| Тяговый класс трактора | Диапазоны номинальных тяговых усилий РКРН, кН | Тяговый класс трактора | Диапазоны номинальных тяговых усилий РКРН, кН |
| 0,2 | 1,8–5,4 | 3 | 27–36 |
| 0,6 | 5,4–8,1 | 4 | 36–45 |
| 0,9 | 8,1–12,6 | 5 | 45–54 |
| 1,4 | 12,6–18 | 6 | 57–72 |
| 2 | 18–27 | 8 | 72–108 |
Верхние границы каждого диапазона в табл. 2.2 также относятся к соответствующему классу тяги.
Номинальное тяговое усилие заданного трактора РКРН в указанных ранее условиях рассчитывается по формуле (кН)
 ,
,
где т – эксплуатационная масса трактора, кг; g = 9,81 – ускорение свободного падения, м/с2; j Д – коэффициент сцепления движителей трактора с почвой при допустимом буксовании; l – доля веса трактора, приходящаяся на движители (коэффициент нагрузки ведущих колес); f – коэффициент сопротивления качению трактора.
При практических расчетах пользуются упрощённым равенством
 (2.1)
(2.1)
где GH – номинальный эксплуатационный вес трактора, соответствующий допустимому (номинальному) буксованию, кН, j KPH – коэффициент использования сцепного веса трактора при допустимом (номинальном) буксовании.
На основании обобщения многочисленных тяговых испытании тракторов по литературным данным рекомендуются следующие значения j KPH для практических расчётов.
j KPH = 0,37–0,39 – для колёсных тракторов 4К2;
j KPH = 0,40–0,45 – для колёсных тракторов 4К4;
j KPH = 0,50–0,60 – для гусеничных тракторов.
Подставив значение j KPH в (2.1), получим расчетное номинальное тяговое усилие трактора РКРН, которое следует сопоставить с данными табл. 2.2. Определенное расхождение, естественно, неизбежно, но в целом результаты должны быть близкими.
3. Энергосберегающий диапазон изменения тяговых усилий трактора находится и зоне РКР = РКРО … РКРД – между значениями РКРО при максимальном тяговом КПД h Т = h Тт и РКРД при допустимом буксовании d = d Д (значения d Д приведены ранее).
Обоснование диапазона изменения РКР. При максимуме тягового КПд, когда h Т = h Тт, суммарные непроизводительные потери мощности в самом тракторе на самопередвижение и на буксование будут наименьшими (потери мощности в трансмиссии при установившемся режиме работы можно принять постоянными). Однако трактор используется с с.-х. машинами, тяговое сопротивление большинства которых возрастает с увеличением скорости трактора, соответственно и всего агрегата. Энергосберегающий режим работы при этом смещается в сторону меньших значений рабочей скорости трактора и агрегата тем значительнее, чем больше влияние скорости на тяговое сопротивление с.-х. машины. Такое уменьшение скорости возможно только до значений VД и РКРД, соответствующих допустимому буксованию d = d Д. Как будет показано в последующих заданиях, в диапазоне РКР = РКРО … РКРД трактор работает в энергосберегающем режиме с большинством с.-х. машин. Если тяговое сопротивление с.-х. машины мало зависит от скорости ТО энергосберегающие режимы трактора и всего агрегата совпадают при РКР = РКРО.
Для определения РКРО необходимо выразить тяговый КПД трактора в функции РКР, на основании известного из теории трактора исходного выражения
h Т = h ТP × h f × hd (2.2)
где h Т – тяговый КПД трактора; h ТP; h f; hd – КПД, учитывающие потери мощности соответственно в трансмиссии, на самопередвижение трактора и на буксование.
Значение, h ТP для установившегося режима рабочего хода трактора приближенно можно принять постоянным (в расчетах можно принять усредненное значение h ТP» 0,88).
Для определения h f воспользуемся равенством
 (2.3)
(2.3)
где РКР, PK – значения тягового усилия и касательной силы трактора, кН; j кр = РКР / 10-3 × mg – коэффициент использования эксплуатационного веса трактора; Pf = 10-3 × mg × f – сила сопротивления качению трактора, кН.
Значение hd зависит от самого буксования d.
hd = 1 – d (2.4)
Буксование d при этом также определяется в функции j KP по эмпирической формуле
 (2.5)
(2.5)
где а, в - эмпирические коэффициенты, определяемые по результатам тяговых испытаний тракторов.
При этом для всех однотипных тракторов на одном и том же почвенном фоне значения а и в примерно одинаковые, что существенно упрощает практические расчеты.
На основании (2.2)–(2.5) получим значение тягового КПД трактора в функции j KP.
 (2.6)
(2.6)
По условию d× h Т / d ×j кр = 0 получим оптимальное значение j КРО, обеспечивающее максимум тягового КПД трактора (h Т ® max):
 (2.7)
(2.7)
где  ;
; 
Перед корнем знак «+» при S < 0 и d < 0, а в остальных случаях знак «-».
По значению j KPО определим соответствующее оптимальное тяговое усилие трактора:
 (2.8)
(2.8)
Численные значения а, в и f приведены в табл. 2.3.
Таблица 2.3
Значения a, в, f
| Типы тракторов | Стерня | Поле, подготовленное под посев | ||||
| а | в | f | а | в | f | |
| 4K2 с колесами разного размера | 0,141 | 0,615 | 0,08–0.10 | 0,248 | 0,712 | 0,16–0,20 |
| 4К4 с колесами разного размера | 0,193 | 0,919 | 0,08–0.10 | 0,212 | 0,880 | 0,16–0,20 |
| 4К4 с колесами одинакового размера | 0,110 | 0,773 | 0,08–0.10 | 0,0834 | 0,609 | 0,16–0,20 |
| Гусеничные | 0,0089 | 0,777 | 0,06–0,08 | 0,0441 | 0,869 | 0,09–0,12 |
Значение j KPД при допустимом буксовании получим из (2.5) при d = d Д.
 (2.9)
(2.9)
Затем можно рассчитать соответствующее допустимое тяговое усилие трактора
 (2.10)
(2.10)
На основании (2.8), (2.10) получим искомый энергосберегающий диапазон изменения тяговых усилий трактора:
РКР = РКРО … РКРД, (2.11)
в пределах которого в последующем должны рассчитываться соответствующие агрегаты.
Максимальное значение тягового КПД трактора h ТО, соответствующий РКРО получим из (2.6) при j KP = j KPО, определяемом из (2.7), а значение h ТД при допустимом буксовании – из (2.6) при j KP = j KPД, определяемом из (2.9).
При j KP = j KPО можно определить также буксование d о, соответствующее максимуму тягового КПД трактора:
 (2.12)
(2.12)
4. Для определения энергосберегающего диапазона рабочих скоростей трактора Vо и VД, соответствующих РКРО и РКРД, воспользуемся с учетом (2.3) равенством:
 (2.13)
(2.13)
где NН – номинальная мощность двигателя трактора (выбирается из табл. 1.2 первого задания), кВт; e N – коэффициент загрузки двигателя; VT – теоретическая скорость трактора, м/с.
Рабочая V и теоретическая VT скорости связаны соотношением:
 (2.14)
(2.14)
Приближенно, с учетом данных табл. 1.3, из задания 1 для e N можно принять значение e N» 0,90.
Значения скоростей Vо и VД на основании (2.13), (2.14) определяются из равенств:
 (2.15)
(2.15)
 (2.16)
(2.16)
где Э = NH /(10-3 m) – энергонасыщенность трактора, кВт/т.
Энергосберегающий диапазон скоростей при этом составит:
V = VД – Vo (2.17)
Из полученных результатов следует, что энергосберегающий диапазон скоростей для однотипных тракторов на одинаковых почвенных фонах и при равных энергонасыщенностях будет один и тот же, что существенно облегчает практические расчеты.
5. Диапазоны энергосберегающих значений тяговых усилий РКР = РКРО … РКРД и рабочих скоростей V= VД – V0 показаны на рис. 2.1 на примерной тяговой характеристике трактора.
Значения РКРО и РКРД примерно соответствуют передаче, на которой тяговая мощность NKP имеет наибольшее значение, NKP = NKPm, а значение РКРД и VД определяются при d = d Д, как показано на рис. 2.1.
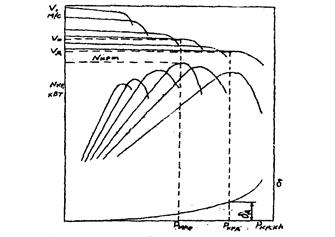
Рис. 2.1. Примерная тяговая характеристика
Если имеется опытная тяговая характеристика трактора на данном почвенном фоне, то приближенные значения РКРО, Vо, d о, и РКРД, VД, d Д выбираются непосредственно по тяговой характеристике, а значения h Т и h ТД рассчитываются по формулам:
 ;
;  (2.18)
(2.18)
Если описанный, энергосберегающий режим работы трактора в диапазоне РКР = РКРО – РКРД не может быть реализован по агротехническим или другим причинам, то за пределы указанного диапазона можно переходить только при значениях РКР < РКРО и соответственно V > Vo, то есть в сторону повышенных скоростей при обеспечении требуемого качества работы. При необходимости возможен и переход на частичный режим работы двигателя, описанный в предыдущем задании. Во всех указанных случаях удельный расход энергии и топлива на единицу объема выполненной работы будет больше по сравнению с оптимальным режимом работы двигателя и трактора.
При выполнении данного задания на компьютере (исследовательская студенческая работа) следует получить закономерности изменения определяемых параметров и показателей, работы трактора для всего диапазона изменения действующих факторов с последующим научным, анализом, и практическими рекомендациями под руководством преподавателя.
Например, можно проанализировать влияние на показатели работы трактора массы балласта, а также дополнительной нагрузки на ходовую часть трактора, создаваемой устройствами типа гидроувеличителя сцепного веса (ГСВ).
Для этого в соответствующих равенствах эксплуатационный вес трактора G = 10-3 mg упрощенно следует представить в виде:
 (2.19)
(2.19)
где m d – общая масса балластных грузов, кг; PГ – нормальная нагрузка на ходовую часть трактора, создаваемая ГСВ, кН; mo – эксплуатационная масса трактора без балластных грузов, кг.
Изменяя m d и РГ в соответствующих пределах, можно обосновать желаемый энергосберегающий режим работы трактора.
При более точных расчётах следует учитывать перераспределение веса трактора между осями другие факторы, включая устойчивость и управляемость в соответствии с теорией трактора.
6. Итоговые результаты расчётов по пунктам, включая исходные данные
| № пункта | Наименование и обозначение показателя или параметра | Результат расчёта с указанием размерности |
| Исходные данные | ||
Выполнил ________________________ Ф.И.О. студента
подпись
Принял ________________________ Ф.И.О. преподавателя
подпись
ЗАДАНИЕ 3
Date: 2015-09-02; view: 1433; Нарушение авторских прав