Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Матрица поворота вокруг произвольной оси
|
|
В ряде случаев подвижная система координат OUVW может совершать поворот на угол j относительно произвольной оси r, представляющей собой единичный вектор с компонентами rx, ry и rz, выходящие из начала координат О. Это применяется тогда, когда нужно упростить последовательность поворотов относительно основных осей систем координат OXYZ и/или OUVW. Их можно заменить одним поворотом системы OUVW вокруг оси r (рис. 3.1).
Чтобы получить матрицу поворота R r,j, можно сначала произвести ряд поворотов относительно осей системы OXYZ, чтобы совместить ось r с осью OZ. Затем произвести требуемый поворот вокруг оси r на угол j и опять ряд поворотов относительно системы OXYZ, возвращающих ось OZ в исходное положение.
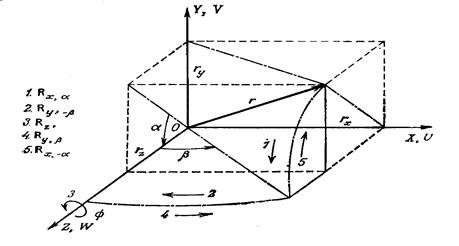
Рисунок 3.1. Вращение вокруг произвольной оси
Из рис. 3.1 видно, что совмещение осей OZ и r может быть реализовано с помощью поворота на угол a относительно оси OX, тогда ось r в результате окажется в плоскости XZ, а затем на угол -b, вокруг оси OY, тогда в результате оси OZ и r совпадут. После поворота на угол j относительно OZ или r проведём прежнюю операцию в обратном порядке с обратными знаками. Результирующая матрица поворота равна:
R r,j = R x,-a × R y,b × R z,j × R y,-b × R x,a =

Из этого легко определить, что:
sina =  ; cosa =
; cosa =  ; sinb = rx; cosb =
; sinb = rx; cosb =  .
.
Подстановка этих равенств в предыдущее выражение дает:
 , (3-1)
, (3-1)
где Vj = vers j= 1– cosj.
Это очень полезная матрица поворота.
Date: 2015-08-15; view: 872; Нарушение авторских прав