Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Стійкість руху
|
|
Стійкість руху - поняття, яке характеризує тривале (довгочасне) зберігання будь-яких характеристик руху системи. Проблема стійкості руху виникає при вивченні гіроскопічних систем, систем автоматичного регулювання (наприклад, слідкуючих систем), коливних рухів, при дослідженні рухів літаків, ракет і т. д.. Ж.- Л. Лагранж вважав, що механічна система знаходиться в рівновазі, якщо під час руху відстані між її точками залишаються скінченними. Відомі визначення стійкості руху, які давали С.- Д. Пуассон, П.- С. Лаплас, М. Є. Жуковський та ін. Найбільш загальним і важливим за своїм застосуванням є визначення, яке дав стійкості руху О. М. Ляпунов. Рух будь-якої механічної системи можна обчислити теоретично, знаючи діючі на неї сили і початкові умови. Рух, який система згідно цих обчислень повинна здійснювати по Ляпунову, називається незбуреним рухом. Але практично система зазнає випадкових впливів, які не були враховані при обчисленнях. Якими б малими і короткочасними не були б ці впливи, вони приведуть до того, що в деякий момент t=t 0 координати і швидкості точок системи одержать малі, але нерівні нулю прирости, які Ляпунов називає початковими збуреннями. Подальший рух називається збуреним рухом. Якщо при малих збуреннях деякі з характеристик руху в збуреному русі мало відрізняються від тих значень, які були в незбуреному русі, то по Ляпунову незбурений рух є стійким по відношенню до цих характеристик руху. Якщо при малих діях (збуреннях) значення розглядуваної характеристики буде в збуреному русі з часом все більше відхилятись від її значення в незбуреному русі, то незбурений рух є по відношенню до даної характеристики нестійким. Умови, при яких розглядуваний рух є стійким, називаються умовами (критеріями) стійкості.
В якості прикладу розглянемо рух симетричного вертикального гіроскопа (рис. 19.1).
Теоретично його вісь повинна залишатись вертикальною при будь-якій кутовій швидкості  . Однак фактично, коли
. Однак фактично, коли  (
( - критична кутова швидкість), будь-яке збурення (поштовх) приводить до все зростаючого відхилення від вертикалі;
- критична кутова швидкість), будь-яке збурення (поштовх) приводить до все зростаючого відхилення від вертикалі; 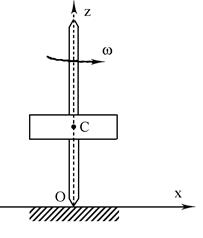 якщо ω>ωкp, то малі збурення практично не позначаються на напрямі осі. Отже, при ω<ωкp гіроскоп по відношенню до напряму його осі буде нестійким, а при ω>ωкp – стійким. Це і є умовою стійкості. При цьому
якщо ω>ωкp, то малі збурення практично не позначаються на напрямі осі. Отже, при ω<ωкp гіроскоп по відношенню до напряму його осі буде нестійким, а при ω>ωкp – стійким. Це і є умовою стійкості. При цьому
 (19.24)
(19.24)
|
де Р - вага гіроскопа, a – відстань від точки О до центра ваги С, Іx і Іy - моменти інерції гіроскопа відносно осей Ох і Оу відповідно. Іншим буде результат, якщо розглянути рух гіроскопа по відношенню до кута обертання φ навколо осі Oz. В незбуреному русі при відсутності тертя (опору) кут повороту φ=ωt. Якщо внаслідок поштовху кутова швидкість зміниться на величину ε, то в збуреному русі φ 1 = (ω+ε) t. Різниця Δ φ=φ 1 - φ= =εt не залежить від ω і з часом нескінченно зростає; тоді по відношенню до кута повороту φ рух гіроскопа буде нестійким при будь-яких значеннях кутової швидкості ω. Таким чином, один і той же рух по відношенню до одних з його характеристик може бути стійким, а по відношенню до інших - нестійким.
Дослідження положень відносної рівноваги.
Часто при дослідженні різних механізмів потрібно знайти положення відносної рівноваги і стійкість. Для цього складають так звану змінену потенціальну енергію системи W:
W=П+T, (19.25)
де П - потенціальна енергія, Т - кінетична енергія системи. Стан рівноваги (положення рівноваги) визначається з рівняння
 (19.26)
(19.26)
Положення рівноваги буде стійким при
 >0. (19.27)
>0. (19.27)
При <0 (19.28)
положення рівноваги є нестійким.
Дослідження стійкості руху по першому наближенню.
Метод визначення стійкості руху по першому наближенню полягає в наступному. Нехай
 (19.29)
(19.29)
є частинними розв’язками системи диференціальних рівнянь першого порядку
 (19.30)
(19.30)
при заданих початкових умовах руху
 при t 0=0. (19.31)
при t 0=0. (19.31)
Розв’язок (19.29) визначає незбурений рух системи. При інших початкових умовах руху значення змінних уk, які визначають подальший рух системи, записують так:
 (19.32)
(19.32)
Віднімемо від (19.32) рівняння (19.30) і знайдемо
 (19.33)
(19.33)
Введемо позначення:
 (19.34)
(19.34)
Одержимо систему диференціальних рівнянь
 (19.35)
(19.35)
З (19.34) виходить, що
xk (0, 0,...,0; t) = 0 (19.36)
(х 1 = х 2 =...= хn = 0) (19.37)
є частинним розв’язком системи (19.35), який відповідає незбуреному рухові.
Для розгляду стійкості руху по першому наближенню в системі рівнянь (19.35) в правій частині виділяють лінійні складові (доданки). Коли час явно не входить в праву частину рівняння, будемо мати
 (19.38)
(19.38)
Запишемо характеристичне рівняння системи (19.38):
 (19.39)
(19.39)
Згідно першої теореми Ляпунова, незбурений рух, який визначається рівнянням (19.29), є стійким, коли корені характеристичного рівняння (19.39) мають від’ємну дійсну частину. В цьому випадку нелінійні доданки в правій частині рівнянь (19.38) не впливають на стійкість руху. Про знак кореня характеристичного рівняння можна судити на основі теореми Гурвіца, яка формулюється так: рівняння n -го степеня з дійсними коефіцієнтами (а 0>0)
 (19.40)
(19.40)
має всі корені з від’ємною дійсною частиною, коли всі визначники вигляду
є додатними.
При розв’язуванні задач на дослідження стійкості руху системи по першому наближенню рекомендується такий порядок дій:
1) визначаємо число ступенів вільності системи і вибираємо узагальнені координати;
2) користуючись рівнянням Лагранжа, складаємо рівняння незбуреного руху;
3) складаємо рівняння збуреного руху, вважаючи, що узагальнені координати відрізняються від значень в незбуреному русі на величини першого порядку малості;
4) віднімаємо від диференціальних рівнянь збуреного руху відповідні рівняння незбуреного руху;
5) для системи лінійних диференціальних рівнянь з постійними коефіцієнтами складаємо характеристичне рівняння;
6) користуючись теоремою Гурвіца, визначаємо знаки дійсних частин коренів характеристичного рівняння і потім робимо висновок про стійкість руху системи.
Зауваження. Для закріплення матеріалу §19 (пункт 19.4) необхідно розв’язати задачі зі збірника “Мещерский И. В. Сборник задач по теоретической механике. – М., Наука, 1981 (1986)”:
1) № 56.1 - 56.5;
2) № 56.7 – 56.15;
3) № 56.17 - 56.20.
Рекомендується розв’язати також задачі № 18.6, 18.7, 18.10, 18.12, 18.15, 18.19, 18.20, 18.24, 18.26, 18.27, 18.32 зі збірника “Сборник задач по теоретической механике /Под ред. К. С. Колесникова. – М., Наука, 1989”.
Date: 2015-08-15; view: 571; Нарушение авторских прав