Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Общие приемы решения уравнений динамики упругих систем
|
|
Задачи динамики упругих систем заключаются в определении характера изменения и максимальных значений динамических нагрузок звеньев, частот колебаний, условий резонансного состояния системы.
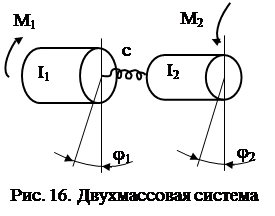
Рассмотрим совместное решение двух линейных уравнений второго порядка. Эти уравнения описывают движение двухмассовой системы с упругой связью (рис. 16).
 Здесь:
Здесь:
 и
и  – текущие углы поворота масс с
– текущие углы поворота масс с  и
и  , которые при наличии упругой связи не равны
, которые при наличии упругой связи не равны  ;
;
‑ ведущая масса;
 ‑ ведомая масса.
‑ ведомая масса.
На массу I1 действует некоторый момент M1, а на массу I1 ‑ момент M2, представляющий статическое сопротивление, действующее на эту массу.
Система может прийти в движение в случае, когда  . При пуске и торможении машины её разгон или торможение осуществляются за счет разности
. При пуске и торможении машины её разгон или торможение осуществляются за счет разности  . Поскольку , можем написать
. Поскольку , можем написать
 , (101)
, (101)
где f(t) – избыточная сила (момент), зависящая от времени и существующая в периоды неустановившихся процессов.
Дифференциальные уравнения движения масс I1 и I2
 , (102)
, (102)
 (103)
(103)
Для решения системы уравнений (102) и (103), продифференцируем каждое из них
 , (104)
, (104)
 . (105)
. (105)
Суммируя эти уравнения, получим
 , (106)
, (106)
откуда
 , (107)
, (107)
 . (108)
. (108)
Подставляя значение (108) в уравнение (104), а (107) в (105), после преобразований получим
 , (109)
, (109)
 . (110)
. (110)
Решения уравнений (109) и (110) относительно вторых производных j1 и j2 по t в общем виде будет
 , (111)
, (111)
 , (112)
, (112)
где  и
и  – частные решения уравнений, зависящие от функции f(t).
– частные решения уравнений, зависящие от функции f(t).
С учетом формулы (62) выражения (111) и (112) можно представить в виде
 , (113)
, (113)
 . (114)
. (114)
Дважды интегрируя уравнения (113) и (114), получим
 , (115)
, (115)
 . (116)
. (116)
Зная режим разгона или торможения –  , и, следовательно, имея возможность найти частные решения уравнений (113) и (114) и , а также используя соотношения между , ,
, и, следовательно, имея возможность найти частные решения уравнений (113) и (114) и , а также используя соотношения между , ,  и
и  из уравнений (102) и (103), запишем
из уравнений (102) и (103), запишем
 ;
;  ;
;  ;
;  . (117)
. (117)
Тогда можно записать выражения, содержащие одинаковые постоянные коэффициенты
, (118)
 . (119)
. (119)
Приняв начальные условия, действительные для разгона или торможения, подставив их в уравнения (118) и (119), найдем конкретные решения для j1 и j2.
Деформация упругого звена будет определяться разностью
 .
.
(120)
Момент в упругой связи равен
 , (121)
, (121)
где c – приведенная жесткость рассматриваемой системы.
Date: 2015-08-15; view: 454; Нарушение авторских прав