Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Силовой расчет редуктора
|
|
Исходными данными для силового расчета являются результаты кинематического расчета редуктора и величина момента полезного сопротивления  на выходном валу редуктора, равная среднему значению движущего момента
на выходном валу редуктора, равная среднему значению движущего момента  на валу кривошипа рычажного механизма
на валу кривошипа рычажного механизма
 Н∙м,
Н∙м,
где  - угол качания кулисы, нагруженной моментом
- угол качания кулисы, нагруженной моментом  (из задания на рычажный механизм).
(из задания на рычажный механизм).
Приняты следующие КПД кинематических пар: вращательной -  , зацепления -
, зацепления -  .
.
Целью расчета является определение энергетических и силовых соотношений редуктора.
1.3.1 Расчет с учетом потерь мощности на трение
Расчет с учетом потерь мощности на трение выполняем с помощью уравнений баланса мощностей и равновесия. Коэффициент полезного действия в уравнениях баланса мощностей является сомножителем при подводимой мощности, то есть при положительном слагаемом уравнения.
1)Уравнение энергетического баланса для выходного вала
 . (1.3)
. (1.3)
Так как мощность  , снимаемая с выходного вала, отрицательна и угловая скорость
, снимаемая с выходного вала, отрицательна и угловая скорость  , то момент
, то момент  Н∙м является положительным. Очевидно, что уравнение (1.3) справедливо только при
Н∙м является положительным. Очевидно, что уравнение (1.3) справедливо только при  .
.
2) Уравнение баланса мощностей для рядовой кинематической цепи
 (1.4)
(1.4)
Так как в этом уравнении угловые скорости  имеют противоположные знаки, то моменты
имеют противоположные знаки, то моменты  будут одного знака, т.е.
будут одного знака, т.е.  .
.
3) Уравнение баланса мощностей для промежуточного вала
 . (1.5)
. (1.5)
Так как второе слагаемое – отрицательно, то первое – положительно, отсюда  .
.
4) Для планетарной ступени:
уравнение баланса мощностей в обращенном движении
 ;
;
уравнение равновесия
 .
.
Так как в уравнении баланса мощностей знаки относительных скоростей разные, т.е.  и
и  , то знаки моментов
, то знаки моментов  и
и  должны быть одинаковыми. Из уравнения равновесия следует, что при отрицательном моменте
должны быть одинаковыми. Из уравнения равновесия следует, что при отрицательном моменте  моменты и – положительны. Тогда мощность
моменты и – положительны. Тогда мощность  , и колесо
, и колесо  в обращенном механизме является ведущим.
в обращенном механизме является ведущим.
Уравнения, записанные для планетарной ступени, образуют систему, решение которой имеет вид
 . (1.6)
. (1.6)
5) Уравнение баланса мощностей для входного вала
 (1.7)
(1.7)
Т.к.  , то второе слагаемое отрицательно, а первое – положительно, при этом
, то второе слагаемое отрицательно, а первое – положительно, при этом  , что подтверждает правильность определения знаков моментов.
, что подтверждает правильность определения знаков моментов.
6) Уравнение баланса мощностей для механизма
 , (1.8)
, (1.8)
где  – коэффициент полезного действия редуктора.
– коэффициент полезного действия редуктора.
Определим по приведенным уравнениям моменты на звеньях механизма при заданном моменте и коэффициентах полезного действия
 ;
;
 .
.
Из уравнения (1.3) получим момент на колесе 
 Н∙м.
Н∙м.
Из уравнения (1.4) найдем момент на колесе  :
:
 Н∙м.
Н∙м.
Из уравнения (1.5) момент на водиле
 Н∙м.
Н∙м.
Из уравнения (1.6) для планетарной ступени получим:
момент на колесе :
 Н∙м;
Н∙м;
момент на колесе  :
:
 Н∙м.
Н∙м.
Из уравнения (1.7) найдем величину подводимого момента:
 Н∙м.
Н∙м.
Из уравнения (1.8) найдем коэффициент полезного действия редуктора:

1.3.2. Расчет без учета потерь мощности на трение
1) Определение моментов на звеньях механизма
Для расчета величин моментов воспользуемся формулами (1.3)…(1.7). Полагая 
 , получим:
, получим:
 Н∙м;
Н∙м;
 Н×м;
Н×м;
 Н∙м;
Н∙м;
 Н∙м;
Н∙м;
 Н∙м;
Н∙м;
 Н∙м.
Н∙м.
Из формулы (1.8) определим КПД

Величина  подтверждает правильность расчета моментов.
подтверждает правильность расчета моментов.
В данном механизме замкнутая мощность отсутствует.
Мощности на звеньях:
 кВт;
кВт;
 кВт;
кВт;
 кВт.
кВт.
1) Силовой расчет методом окружных сил
В рассматриваемом примере числа зубьев колес  и
и  по условию соосности были получены дробными, а затем округлены до целых, поэтому для планетарной ступени межосевое расстояние
по условию соосности были получены дробными, а затем округлены до целых, поэтому для планетарной ступени межосевое расстояние  следует вычислять по формулам
следует вычислять по формулам
 ,
,
 .
.
Примем  , получим
, получим
 =
=  =
=  м,
м,
 мм = 0.11м;
мм = 0.11м;
для рядовой ступени
 мм = 0.11м.
мм = 0.11м.
Диаметры начальных окружностей для планетарной ступени
 мм = 0.085м;
мм = 0.085м;
 мм = 0.135м;
мм = 0.135м;
 мм = 0.138м;
мм = 0.138м;
 мм = 0.358м.
мм = 0.358м.
Диаметры начальных окружностей для рядовой ступени
 м;
м;  м;
м;  м;
м;
 м.
м.
Силовой расчет методом окружных сил проводим согласно схеме, изображенной на рис. 1.2.
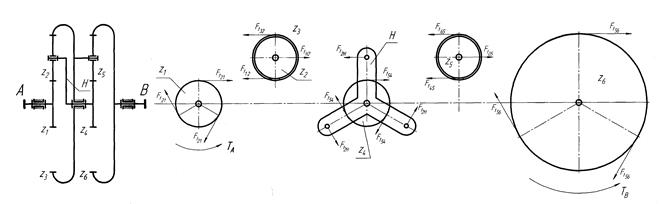
Рис. 1.2.
Для расчета величин окружных сил  в зацеплениях колес используем условия равновесия моментов всех внешних сил, действующих на каждое из звеньев механизма.
в зацеплениях колес используем условия равновесия моментов всех внешних сил, действующих на каждое из звеньев механизма.
Момент  Н·м;
Н·м;
из уравнения моментов для колеса
окружное усилие:
 Н.
Н.
Для связанного колеса  из уравнения моментов:
из уравнения моментов:
 ,
,
получим
 Н.
Н.
Из уравнения моментов для узла водила Н с колесом 
получим:
 Н.
Н.
Для сателлита  из уравнения моментов:
из уравнения моментов:
получим
 Н;
Н;
 тогда
тогда
 Н.
Н.
Из уравнения моментов для колеса получим момент на входном валу
 Н·м,
Н·м,
что совпадает с величиной этого момента, рассчитанного выше с помощью уравнений баланса мощностей.
Распечатка результатов расчета зубчатого механизма
по программе FORCE
Силовой анализ зубчатого редуктора по схеме 10
методом окружных сил
ИСХОДНЫЕ ДАННЫЕ
Модуль, мм: m = 5.000.
Числа зубьев колес планетарной ступени: z1 = 17;
z2 = 27;
z3 = 70.
Число сателлитов в планетарной ступени: nW2 = 3.
Числа зубьев колес рядовой цепи: z4 = 17;
z5 = 27;
z6 = 70.
Число связанных колес z5 в рядовой цепи: nW5 = 3.
Момент сопротивления на выходном валу, Н∙м: TB = 58.333.
РЕЗУЛЬТАТЫ РАСЧЕТОВ
Передаточное отношение редуктора: iAB = -21.073.
Радиус водила планетарной ступени, мм: rH = 110.000.
Диаметры начальных окружностей колес, мм: dw1 = 85.000;
dw21 = 135.000;
dw23 = 135.000;
dw3 = 358.140.
Межосевое расст. в ряд. цепи z4z5z6, мм:aw45 = 110.000.
Диаметры начальных окружностей колес, мм: dw4 = 85.000;
dw54 = 135.000;
dw56 = 138.140;
dw6 = 358.140.
Окружные силы в кинематических парах, Н:Ft56 = 108.585;
Ft45 = 111.110;
Ft0 = 219.696;
FtH = 42.929;
Ft32 = 21.218;
Ft12 = 21.711.
Движущий момент на входном валу, Н∙м: TA = 2.768.
Date: 2015-07-27; view: 962; Нарушение авторских прав