Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Приведение масс и сил. Звено приведения
|
|
Динамический анализ механизмов
Приведение масс и сил. Звено приведения
В динамике механизмов изучается их движение с учетом действующих сил.
Если все приложенные к звеньям силы известны, то можно определить закон движения какого-либо звена и механизма. Однако практическое решение этой задачи оказывается весьма сложным. Поэтому, как правило, прибегают к отдельным частным решениям, применяя способы приближенного определения движения механизма. Для этого сложный многозвенный механизм заменяют его динамической моделью. Если механизм имеет только одну степень свободы, то в качестве модели механизма принимают одно условное звено. Так, для системы «электродвигатель - исполнительный механизм» выбирают в качестве начального звена вал электродвигателя. Закон движения условного звена должен полностью совпадать с законом движения начального звена. При этом угловые скорости начального и условного звеньев должны быть равны.
При решении задач кинематики и силового расчета механизмов с одной степенью свободы угловая скорость ω1 ведущего кривошипа принимают постоянной. В действительности ω1 даже при установившемся движении только в редких случаях остается постоянной. Обычно угловая скорость ω1 периодически изменяется в зависимости от соотношения заданных сил, которые сами являются функциями различных параметров. Действительный закон движения ведущего звена определяют по методу Лагранжа с помощью звена приведения (динамической модели механизма), в качестве которого чаще всего выбирают ведущее звено - кривошип (или ползун). Если, например, задан шарнирный четырехзвенник с одной степенью свободы
(рисунок 1.29, а), то его ведущий кривошип 1 становится динамической моделью механизма (рисунок 1.29, б) после приведения к нему всех движущихся масс и всех заданных сил: движущих и сопротивления. Иначе говоря, для обращения кривошипа в звено приведения его момент инерции J l должен быть заменен приведенным моментом инерции J п так, чтобы кинетическая энергия звена приведения Т п стала равной кинетической энергии всего механизма (Σ Тi), т. е.
Т п = J пω12 / 2 = Σ [ JSi ω i 2 / 2 + m iυ 2 Si / 2]. (1.20)
Кроме того, мощности приведенных моментов сил сопротивлений N п.с и движущих сил N п.д должны быть равны сумме мощностей всех сил и моментов сил сопротивлений (F сi, M ci) и движущих (F дi, М дi), действующих на звенья механизма, т. е.
 N п.с= M п.сω1 = Σ Nci = Σ [ Mci ω i + Fci υ ci cos α ci ]; (1.21)
N п.с= M п.сω1 = Σ Nci = Σ [ Mci ω i + Fci υ ci cos α ci ]; (1.21)
N п.д = M п.дω1 = Σ N дi = Σ [ М дi ω i + дi υдi cos α д i ].
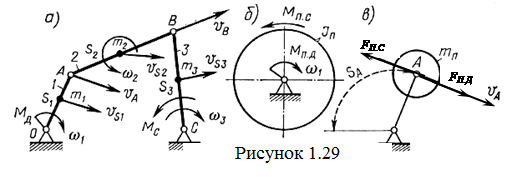 |
В выражениях (1.20) и (1.21) для i -го звена: υSi и ω i - скорость центра масс и угловая скорость; mi и JSi - масса и момент инерции звена относительно оси, перпендикулярной плоскости вращения и проходящей через ц. м.; Mci и Мдi - моменты пар сил сопротивлений и движущих; Fci и υci - сила сопротивлений и скорость точки Ci ее приложения; aci - угол, образуемый векторами Fci и υc i (аналогично, αдi = F дi υ дi).
Приведение масс и сил может производиться не только к звену, но и к его произвольно взятой точке А (рисунок 1.29, в) - точке приведения. В этом случае в качестве обобщенной координаты выбирают перемещение Sa точки А по окружности. Массы всех подвижных звеньев заменяют приведенной массой т п, сосредоточенной в точке А, а все заданные силы и моменты сил - приведенной силой F п, приложенной к той же точке. Изложение материала данной главы производится для случая, когда звеном приведения является ведущий кривошип. Если приведение масс и сил производится к точке, то формулы приведения и другие закономерности определяются аналогично.
Из уравнения (1.20) находим приведенный момент инерции звена приведения:
J п = 2 Т п / ω21 = Σ [ JSi (ωi /ω1)2 + mi (υSi /ω i)2 ]; (1.22)
он является функцией квадратов передаточных отношений. Последние зависят от φ, поэтому и приведенный момент инерции является функцией обобщенной координаты J п = J п(φ).
Если ведущий кривошип 1 статически уравновешен
(рисунок 1.29, б), то n
υ S1 = 0 и J п = J 1 + Σ [ J Si (ωi ⁄ω1)2 + m i (υ Si /ω1)2],
i =2
где J 1 = const - момент инерции кривошипа относительно оси его вращения.
Если в механизме имеются еще k звеньев, связанных с ведущим кривошипом постоянными передаточными отношениями (ω i /ωı = const) n-k
J п = J с + Σ [ J Si (ω i /ω1)2 + m i (υSi /ω1)2] = J с + J п (φ), (1.23)
i= 1
k
где J с = J 1+Σ J sj (ω j /ω1)2 − постоянная часть приведенного момента
i=1
инерции, а J п (φ) - переменная (рисунок 1.30).
Если все звенья механизма (например, зубчатого) вращаются вокруг своих центральных осей, то υ S = 0, ωi /ω1 = const, J п(φ) = 0 и J п = J c = const.
Решением уравнений (1.21) относительно приведенных моментов сил сопротивлений и сил движущих находим следующие зависимости, выражающие закон передачи сил и моментов (без учета сил трения):
 Мп.с = Σ[Мc.i(ωi /ω1) + F c.i(vci /ω1)cosαci]; (1.24)
Мп.с = Σ[Мc.i(ωi /ω1) + F c.i(vci /ω1)cosαci]; (1.24)
Мп.д = Σ[Мд.i(ωi /ω1) + F д.i(vдi /ω1)cosαдi].
Date: 2015-07-11; view: 877; Нарушение авторских прав