Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Вероятность успешной посадки самолетов
|
|
Заход самолета на посадку по курсоглиссадной системе основывается на непрерывном измерении величин отклонения самолета от равносигнальных направлений, то есть от линий курса и глиссады. Результаты этих измерений, как, впрочем, и большинства любых других измерений, носят случайный характер, поэтому достоверность их должна быть оценена вероятностными методами.
Строго говоря, само совпадение равносигнальных линий курса и глиссады с осью ВПП и заданным углом к горизонту также носит случайный характер, ибо на положение этих линий в пространстве одновременно влияет множество практически не зависимых друг от друга факторов. Поэтому в соответствии с теорией измерений все точностные характеристики систем инструментальной посадки заданы с определенной доверительной вероятностью.
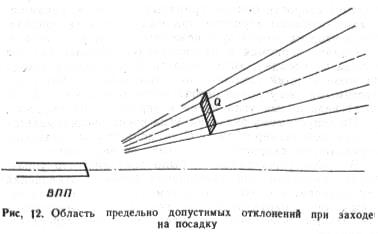
В результате использования системы инструментальной посадки самолет должен быть выведен в определенную область Q пространства перед ВПП (рис. 12),в которой летчик визуально оценивает качество захода на посадку.
В этой области отклонения самолета от оси ВПП (боковые отклонения) и от заданной глиссады снижения (продольные отклонения или отклонения по высоте) не должны превышать допустимых значений. Если самолет в процессе захода на посадку попадает в область Q, то посадка его на ВПП будет обеспечена (конечно, при достаточной подготовленности летчика).
Размеры области предельно допустимых отклонений могут быть точно рассчитаны в зависимости от максимальных величин угла крена, вертикальной скорости и перегрузки, допустимых для конкретного типа самолета при исправлении ошибки захода, а также величины скорости полета по траектории.
Однако на практике эта область не является строго определенной, так как летчик в соответствии со своими навыками глазомерно оценивает возможность исправления ошибок и выполнения посадки. Если, по его оценке, ошибка не может быть исправлена с сохранением достаточного уровня безопасности, то он принимает решение об уходе на второй круг.
Область Q на практике может оказаться более теоретической, так как некоторые хорошо подготовленные летчики могут использовать величины крена и вертикальной скорости больше принятых в расчете. Такая ситуация особенно вероятна при малом остатке топлива, когда уход на второй круг нежелателен или невозможен.
Однако вернемся к рассмотрению обычных случаев захода на посадку, когда область Q определена исходя из возможностей самолета по устранению ошибок с допустимыми (из условий безопасности полета на этой высоте) величинами угла крена и вертикальной скорости.
По допустимому значению угла крена рассчитывается поперечный размер области Q, по допустимому значению вертикальной скорости – ее размер по вертикали.
В предыдущих разделах было показано, что управление самолетом для уменьшения боковых отклонений осуществляется с использованием курсового канала системы инструментальной посадки, а для уменьшения продольных отклонений – с использованием глиссадного канала.
Учитывая практически полную независимость этих каналов друг от друга, можно определить вероятности того, что ошибки по боковому и продольному отклонениям не превысят допустимых значений.
Способы количественного определения указанных вероятностей описаны во многих специальных источниках, поскольку они представляют интерес для инженеров, занимающихся оценкой эффективности и качества пилотажно-навигационных систем. Ниже будет показано решение задачи только в общем виде для иллюстрации существующих на этот счет различных мнений.
Пусть Рб – вероятность того, что ошибки бокового отклонения на заданном удалении от ВПП при заходе самолета на посадку не превысят допустимых значений, а Рпр – вероятность того, что ошибки продольного отклонения на том же удалении от ВПП не превысят своих допустимых значений.
Тогда вероятность попадания самолета в область Q
РQ = Рб Рпр (1)
Если при этом учесть еще и вероятность безотказной работы аппаратуры Рб.р за время захода самолета на посадку, то вероятность успешной посадки
Ру.п = РQ Рб.р = Рб Рпр Рб.р (2)
При автоматическом заходе па посадку повышается точность захода и, следовательно, увеличиваются значения Рб и Рпр, но в то же время несколько уменьшается Рб.р из-за увеличения количества последовательно задействованных элементов системы. В режиме позиционного управления точность захода на посадку наименьшая, но выше вероятность безотказной работы системы.
Итак, вероятность успешной посадки в режимах автоматического, директорного и позиционного управления будет различной.
В результате многих летных экспериментов установлено следующее соотношение вероятностей успешной посадки при автоматическом (Ру.п САУ), директорном (Ру.п дир) и позиционном (Ру.п поз) управлении:
Ру.п САУ > Ру.п дир >> Ру.п поз
Этот вывод справедлив лишь в том случае, когда область Q для всех режимов управления расположена на одном и том же удалении от ВПП.
Иногда возникает задача обеспечения успешной посадки при любом способе управления с заранее заданной вероятностью.
Чтобы Ру.п САУ = Ру.п дир = Ру.п поз, необходимо область Q отодвинуть несколько дальше от торца ВПП (то есть увеличить высоту принятия решения на посадку) для полуавтоматического способа управления самолетом и еще более отодвинуть ее для позиционного способа управления.
Таким образом, при равенстве указанных вероятностей появляются три различные высоты принятия решения, причем
Нпоз >> Hдир > НСАУ
Начальная предпосылка того, что вероятность успешной посадки для всех способов управления должна быть одинаковой и достаточно высокой, по существу, узаконивает повышение метеоминимума, уравнивая в правах все три способа управления самолетом при заходе на посадку.
Учитывая возможность отказа аппаратуры, обеспечивающей режимы автоматического и полуавтоматического управления, полеты при таком подходе планируют из расчета более высокого метеоминимума, что приводит к недоиспользованию возможностей современных систем захода на посадку.
В последнее время отечественные и зарубежные специалисты пришли к мнению о том, что более перспективен другой путь использования возможностей, заложенных в системах инструментальной посадки.
Согласно этому мнению в качестве основного режима управления при заходе на посадку принимается автоматический. Метеоминимум для него (удаление области Q от торца ВПП) выбирается из условия получения достаточно высокой вероятности успешной посадки.
Далее для этого же метеоминимума определяются вероятности Ру.п дир и Ру.п поз. Директорный режим управления должен быть применен только в случае отказа автопилота, а режим позиционного управления – при отказе вычислителей.
Легко заметить, что такая постановка вопроса соответствует условиям функционального резервирования и ведет к повышению общей вероятности успешной посадки. Теория вероятностей располагает формулой для подсчета вероятности успешной посадки с первого захода с учетом функционального резерва:
Ру.п = Ру.п САУ + (1 – Ру.п САУ) Ру.п дир +
+ (1 – Ру.п САУ) (1 – Ру.п дир) Ру.п поз (3)
Такой подход, с нашей точки зрения, более правилен и перспективен, он предполагает более полное использование возможностей современных систем захода на посадку, существенное понижение метеоминимума и, следовательно, расширение боевых возможностей авиации.
Анализ формулы (3) показывает, что чем выше вероятность успешной посадки в автоматическом режиме Ру.п САУ, тем меньше вероятность применения директорного (1 – Ру.п САУ) и тем более позиционного (1 – Ру.п САУ) (1 – Ру.п дир) режимов.
Формула (3) не учитывает положительного влияния радиолокационной системы посадки, осуществляющей контроль правильности выдерживания траектории, на вероятность успешного захода на посадку.
Определим вероятность успешного захода на посадку на следующем примере.
Пусть Ру.п САУ = 0,997, Ру.п дир =.0,9, Ру.п поз = 0,7. Тогда по формуле (3) находим
Ру.п = 0,997 + (1 – 0,997) х 0,9 + (1 – 0,997) х (1 – 0,9) х 0,7 = 0,99991
Из этого примера, числовые значения вероятностей в котором взяты достаточно реальными, становится совершенно очевидным, что вероятность успешной посадки значительно повышается, если учитывается влияние функционального резерва.
Date: 2015-06-11; view: 937; Нарушение авторских прав