Полезное:
Как сделать разговор полезным и приятным
Как сделать объемную звезду своими руками
Как сделать то, что делать не хочется?
Как сделать погремушку
Как сделать так чтобы женщины сами знакомились с вами
Как сделать идею коммерческой
Как сделать хорошую растяжку ног?
Как сделать наш разум здоровым?
Как сделать, чтобы люди обманывали меньше
Вопрос 4. Как сделать так, чтобы вас уважали и ценили?
Как сделать лучше себе и другим людям
Как сделать свидание интересным?

Категории:
АрхитектураАстрономияБиологияГеографияГеологияИнформатикаИскусствоИсторияКулинарияКультураМаркетингМатематикаМедицинаМенеджментОхрана трудаПравоПроизводствоПсихологияРелигияСоциологияСпортТехникаФизикаФилософияХимияЭкологияЭкономикаЭлектроника
Построение линейной регрессионной модели
|
|
В процессе корреляционного анализа оценивается теснота статистической связи между исследуемыми переменными. Далее следует проводить регрессионный анализ, основная задача которого заключается в исследовании зависимости изучаемой переменной от различных факторов и отображении их взаимосвязи в форме регрессионной модели.
В регрессионных моделях зависимая переменная Y может быть представлена в виде функции f(x1,x2,...xk), где x1,x2,...xk — независимые (объясняющие) переменные, или факторы. Связь между переменной Y и независимыми факторами можно охарактеризовать функцией регрессии Y= f(x1,x2,...xk), которая показывает, каково будет в среднем значение переменной Y, если переменные примут конкретные значения. Данное обстоятельство позволяет использовать модель регрессии не только для анализа, но и для прогнозирования экономических явлений.
В регрессионном анализе рассматривается односторонняя зависимость случайной зависимой переменной Y от одной (или нескольких) неслучайной факторной переменной Х. Такая зависимость может возникнуть, например, в случае, когда при каждом фиксированном значении фактора Х соответствующие значения Y подвержены случайному разбросу за счет действия неконтролируемых факторов. В силу воздействия таких неучтенных случайных факторов и причин отдельные наблюдения Y будут в какой-либо мере отклоняться от функции регрессии.
Таким образом, задачами регрессионного анализа являются установление формы зависимости между переменными, оценка функции регрессии, оценка неизвестных значений (прогноз значений) зависимой переменной.
Регрессионная задача для случая одного факторного признака формулируется следующим образом: пусть между переменными Х и Y теоретически существует некоторая линейная зависимость: Y=f(X)=f(x1,x2,...xk)=a+bx.
Это «истинное» уравнение регрессии. Однако в действительности между Х и Y наблюдается не столь жесткая связь, т.к. обычно зависимая переменная находится под влиянием неизвестных, случайных причин (возмущения и помехи). Например, существенным источником отклонений являются ошибки измерения. Учитывая возможные отклонения, линейное уравнение связи двух переменных (парная регрессия) примет вид:yi=a+bxi+Ei (19),
где α – постоянная величина (свободный член уравнения); β – коэффициент регрессии, определяющий наклон линии, вдоль которой рассеяны данные наблюдений; ε – случайная переменная (возмущение, остаток). Случайная составляющая ε и отражает тот факт, что изменение будет неточно описываться изменением, т.к. присутствуют другие, неучтенные факторы в данной модели.
Таким образом в уравнении yi=a+bxi+Ei значение каждого наблюдения yi представлено как сумма двух частей – систематической a+bxi и случайной Ei.
В свою очередь систематическую часть можно представить в виде уравнения yi=a+bxi.
Возможны и нелинейные связи:
— параболическая;
— гиперболическая.
Включение в регрессионную модель новых объясняющих переменных усложняет вычисления. Поэтому в этом случае прибегают к матричному описанию регрессии.
Метод наименьших квадратов — математический метод, применяемый для решения различных задач, основанный на минимизации суммы квадратов отклонений некоторых функций от искомых переменных. Он может использоваться для «решения» переопределенных систем уравнений (когда количество уравнений превышает количество неизвестных), для поиска решения в случае обычных (не переопределенных) нелинейных систем уравнений, для аппроксимации точечных значений некоторой функции. МНК является одним из базовых методов регрессионного анализа для оценки неизвестных параметров регрессионных моделей по выборочным данным.
Сущность метода:
Пусть  — набор
— набор  неизвестных переменных (параметров),
неизвестных переменных (параметров),  ,
,  ,
,  — совокупность функций от этого набора переменных. Задача заключается в подборе таких значений , чтобы значения этих функций были максимально близки к некоторым значениям
— совокупность функций от этого набора переменных. Задача заключается в подборе таких значений , чтобы значения этих функций были максимально близки к некоторым значениям  . По существу речь идет о «решении» переопределенной системы уравнений
. По существу речь идет о «решении» переопределенной системы уравнений  , в указанном смысле максимальной близости левой и правой частей системы. Сущность МНК заключается в выборе в качестве «меры близости» суммы квадратов отклонений левых и правых частей
, в указанном смысле максимальной близости левой и правой частей системы. Сущность МНК заключается в выборе в качестве «меры близости» суммы квадратов отклонений левых и правых частей  . Таким образом, сущность МНК может быть выражена следующим образом:
. Таким образом, сущность МНК может быть выражена следующим образом:
 .
.
В случае, если система уравнений имеет решение, то минимум суммы квадратов будет равен нулю и могут быть найдены точные решения системы уравнений аналитически или, например, различными численными методами оптимизации. Если система переопределена, то есть, говоря нестрого, количество независимых уравнений больше количества искомых переменных, то система не имеет точного решения и метод наименьших квадратов позволяет найти некоторый «оптимальный» вектор в смысле максимальной близости векторов  и
и  или максимальной близости вектора отклонений
или максимальной близости вектора отклонений  к нулю (близость понимается в смысле евклидова расстояния).
к нулю (близость понимается в смысле евклидова расстояния).
62. Проверка адекватности математических моделей.
Центральным понятием теории математического моделирования является понятие адекватности. Игнорирование этого понятия низводит теорию до уровня схоластики, а аргументированная проверка адекватности обеспечивает получение добротных и практически значимых результатов. Адекватность математической модели – это соответствие результатов вычислительного эксперимента поведению реального объекта. Это соответствие следует оценивать с точки зрения целей исследования. Поэтому возможны различные подходы к оценке адекватности различных моделей. Для выявления этого соответствия для механических систем и процессов, характеризующихся измеримыми величинами – параметрами – необходимо провести сравнение параметров модели и оригинала в одних и тех же условиях. Очевидно, что сравнивать следует лишь соответствующие друг другу параметры между собой и только в той области функционирования объекта, в которой предполагается его исследовать. Математические модели механических систем и процессов строятся в основном как подобные детерминированные модели, обладающие общим с оригиналом математическим описанием. Поэтому для адекватности математической модели поведению оригинала – механической системы – достаточно убедиться в выполнении двух свойств: точности и непротиворечивости. Одна- ко так звучат лишь общие, образные требования к адекватности, для практического применения необходимо сформулировать математические формы этих требований.
Таким образом, становится очевидным, что для проверки адекватности необходимо иметь (рис. 8):
– исчерпывающую информацию о реальном случае (что всегда трудно, а подчас бывает практически невозможно);
– результаты контрольного вычислительного эксперимента, воспроиз- водящего известный реальный случай;
– критерий оценки точности математической модели;
– критерий проверки непротиворечивости математической модели
63. Основные этапы развития технических средств автоматизации технологических процессов.
Развитие технических средств автоматизации является сложным процессом, в основе которого лежат экономические интересы и технические потребности автоматизируемых производств, с одной стороны, и те же интересы и технологические возможности производителей технических средств автоматизации, — с другой. Первичным стимулом развития является повышение экономической эффективности работы предприятий, благодаря внедрению новых, более совершенных технических средств автоматизации.
В развитии экономических и технических предпосылок внедрения и использования автоматизации технологических процессов (ТП) можно выделить следующие этапы:
1. Начальный этап, для которого характерны избыток дешевой рабочей силы, низкая производительность труда, малая единичная мощность агрегатов и установок. Благодаря этому самое широкое участие человека в управлении ТП, т.е. наблюдение за объектом управления, а также принятие и исполнение управляющих решений, на данном этапе было экономически оправданным. Механизации и автоматизации подлежали только те отдельные процессы и операции, управление которыми человек не мог осуществлять достаточно надежно по своим психофизиологическим данным, т.е. технологические операции требовавшие больших мускульных усилий, быстроты реакции, повышенного внимания и др.
2. Переход к этапу комплексной механизации и автоматизации производства произошел благодаря росту производительности труда, укрупнению единичной мощности агрегатов и установок, развитию материальной и научно—технической базы автоматизации. На этом этапе, при управлении ТП человек—оператор все более занимается умственным трудом, выполняя разнообразные логические операции при пусках и остановах объектов, особенно при возникновении всевозможных непредвиденных обстоятельств, предаварийных и аварийных ситуаций, а также оценивает состояние объекта, контролирует и резервирует работу автоматических систем. На данном этапе формируются основы крупносерийного производства технических средств автоматизации, ориентированного на широкое применение стандартизации, специализации и кооперации. Широкие масштабы производства средств автоматизации и специфика их изготовления приводят к постепенному выделению этого производства в самостоятельную отрасль.
3. С появлением управляющих вычислительных машин (УВМ) начинается переход к этапу автоматизированных систем управления технологическими процессами (АСУТП), совпавший с началом научно—технической революции. На данном этапе становится возможной и экономически целесообразной автоматизация все более сложных функций управления, осуществляемая с использованием УВМ. Но, поскольку УВМ тогда были весьма громоздкими и дорогими, то для реализации более простых функций управления достаточно широко применялись и традиционные аналоговые устройства автоматики. Недостатком таких систем была их невысокая надежность, т.к. вся информация о ходе ТП поступает и обрабатывается УВМ, при выходе которой из строя, ее функции должен был взять на себя оператор—технолог, контролирующий работу АСУТП. Естественно, что в таких случаях качество управления ТП значительно снижалось, т.к. человек не мог осуществлять управление столь же эффективно, как УВМ.
4. Появление относительно недорогих и компактных микропроцессорных устройств позволило отказаться от централизованных систем управления ТП, заменив их распределенными системами, в которых сбор и обработка информации о выполнении отдельных взаимосвязанных операций ТП, а также принятие управленческих решений осуществляется автономно, локальными микропроцессорными устройствами, получившими название микроконтроллеров. Поэтому надежность распределенных систем значительно выше, чем централизованных.
5. Развитие сетевых технологий, позволившее связать в единую корпоративную сеть многочисленные и удаленные друг от друга компьютеры, с помощью которых осуществляется контроль и анализ финансовых, материальных и энергетических потоков при производстве предприятием продукции, а также управление ТП, способствовало переходу к интегрированным системам управления. В этих системах с помощью весьма сложного программного обеспечения совместно решается весь комплекс задач по управлению деятельностью предприятия, включая задачи учета, планирования, управления ТП и др.
6. Повышение быстродействия и других ресурсов микропроцессоров, используемых для управления ТП, позволяет в настоящее время говорить о переходе к этапу создания интеллектуальных систем управления, способных принимать эффективные решения по управлению предприятием в условиях информационной неопределенности, т.е. нехватке необходимой информации о факторах, влияющих на его прибыль.
64. Основные виды АСУ, особенности построения и применения.
В зависимости от распределения функций контроля и управления между различными техническими средствами, использовались три структуры АСУ ТП:
• Централизованная
• Супервизорная
• Распределенная
Централизованная АСУ ТП
Здесь всё функции контроля выполняет УВМ.
Недостаток, если выйдут из строя УВМ или УСО то всё перестанет работать.
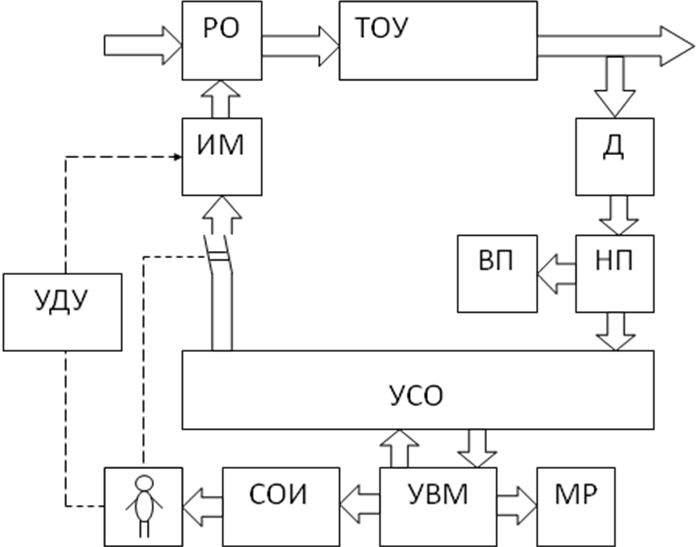
Рис.1.4. Централизованная АСУ ТП
Д - датчик, НП - преобразователь, ВП- вторичный прибор, УСО – устройство связи с объектом, УВМ –управляющая вычислительная машина, СОИ- средства отображения информации, ИМ - исполнительные механизмы, УДУ - устройства дистанционного управления, МР - многоканальные регистраторы
Большое распростронение получают супервизорные АСУ ТП.
Супервизорная АСУ ТП
Подразумевают наличие рада локальных АСР, которые реализованы на базе локальных регуляторов,.
А на УСО и УВМ возлагаются ф-ии сбора и переработки инф-ии о состоянии, нахождения критерия качества, и передача их как заданий в локальные системы.

Рис.1.5. Супервизорная АСУ ТП
Д - датчик, НП - преобразователь, ВП- вторичный прибор, УСО – устройство связи с объектом, УВМ –управляющая вычислительная машина, СОИ- средства отображения информации, ИМ - исполнительные механизмы, УДУ - устройства дистанционного управления, МР - многоканальные регистраторы,ЛР – локальные регуляторы,ЗД - задатчики
В распределённых АСУ ТП идёт распределение ф-й контроля между несколькими территориално распределёнными УСО и УВМ соеденённые сетями.
Такие системы применяются для автоматизации сложных объектов, которые нуждаются в целевом разделении управления.
65. Унификация, агрегатирование, типизация
Принцип унификации
• Принцип унификации (информационных сигналов, интерфейсов, несущих конструкций, элементной базы, модулей и блоков) имеет своей целью обеспечить комплексную совместимость изделий, составляющими которой являются информационная, конструктивная, метрологическая, эксплуатационная, программная и энергетическая совместимости
• Важнейшей составляющей комплексной совместимости является информационная совместимость, которая обеспечивается унификацией информационных связей, используемых в качестве носителей информации.
| Электрические | постоянного тока | 0…5 мА, -5…0…5 мА, 0…20 мА, -20…0…20 мА, 4…20 мА |
| постоянного напряжения | 0…10 мВ, -10…0…10 мВ, 0…100 мВ, 0…1 В, 0…5 В, 0…10 В, -1…0…1 В | |
| переменного напряжения | 0…1 В, 0…10 В | |
| частотные | 0…8 кГц, 2-4 кГц, 4…8 кГц, 0…100 кГц | |
| взаимной индукции | 0…10 мГн | |
| Пневматические | давление | 20…100 кПа |
| Гидравлические | давление | 100…300 кПа |
Date: 2016-05-23; view: 1137; Нарушение авторских прав